
腕关节康复训练装置.pdf

一条****轩吗

1/9
2/9
3/9
4/9
5/9
6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
腕关节康复训练装置.pdf
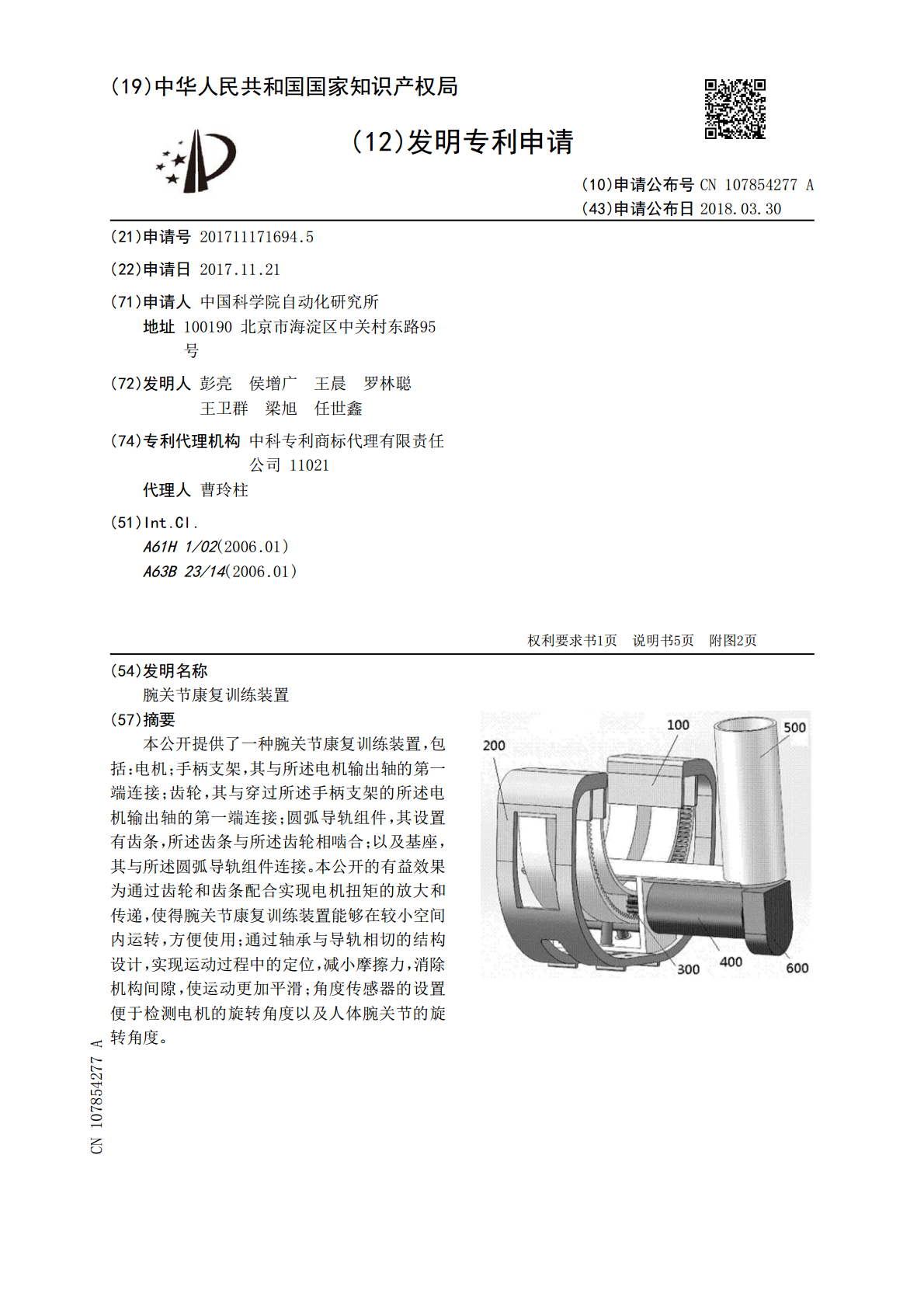
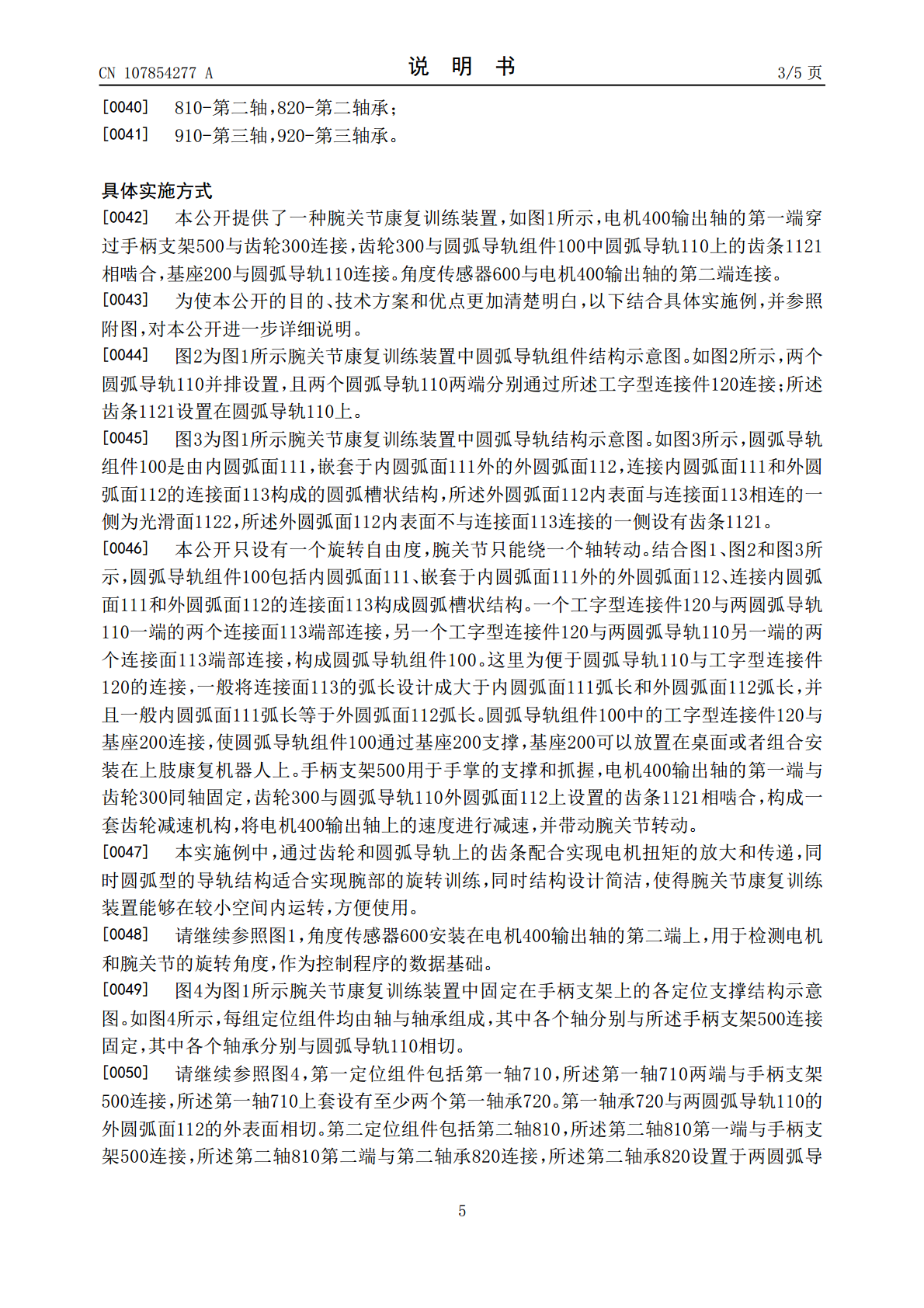
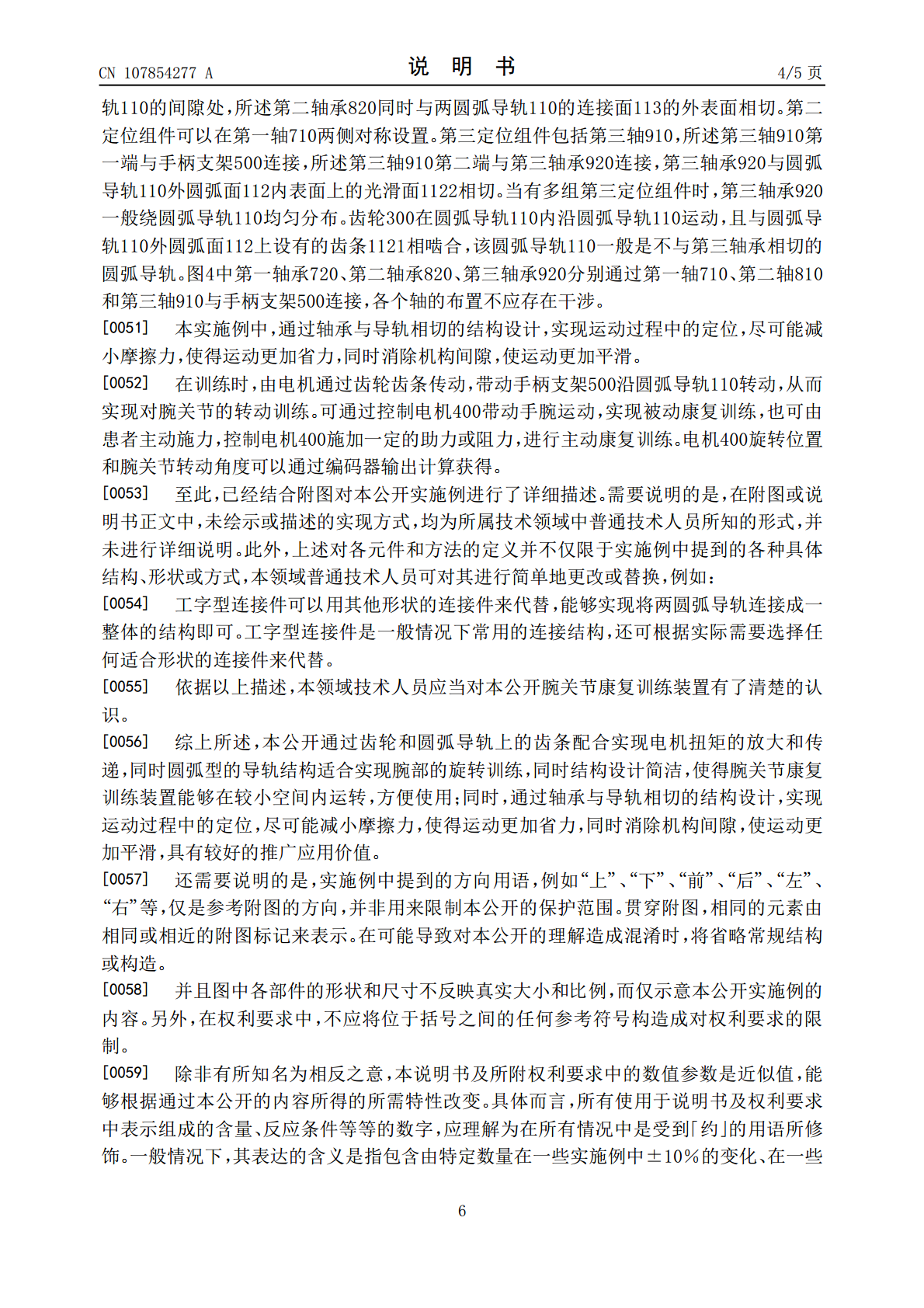
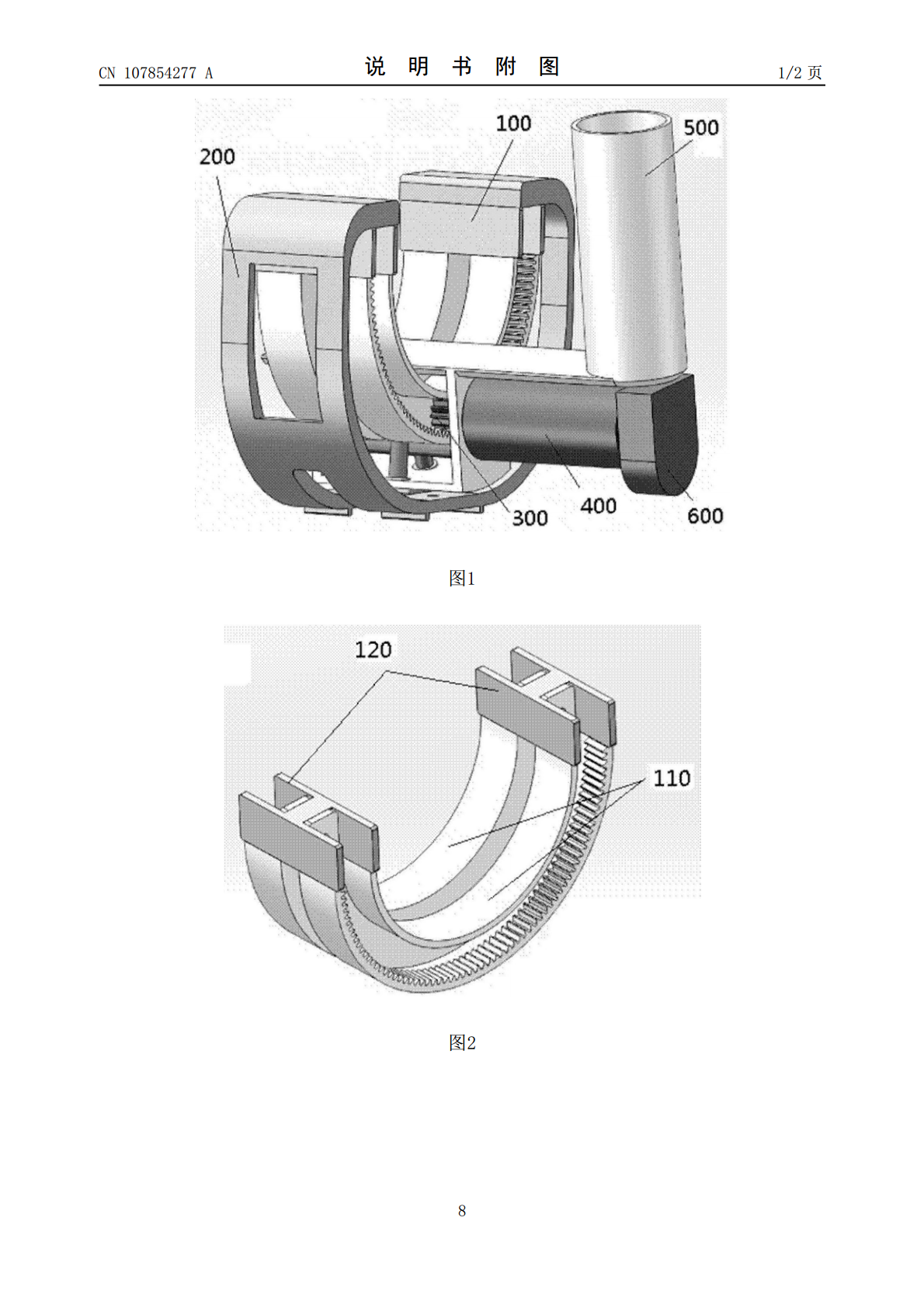
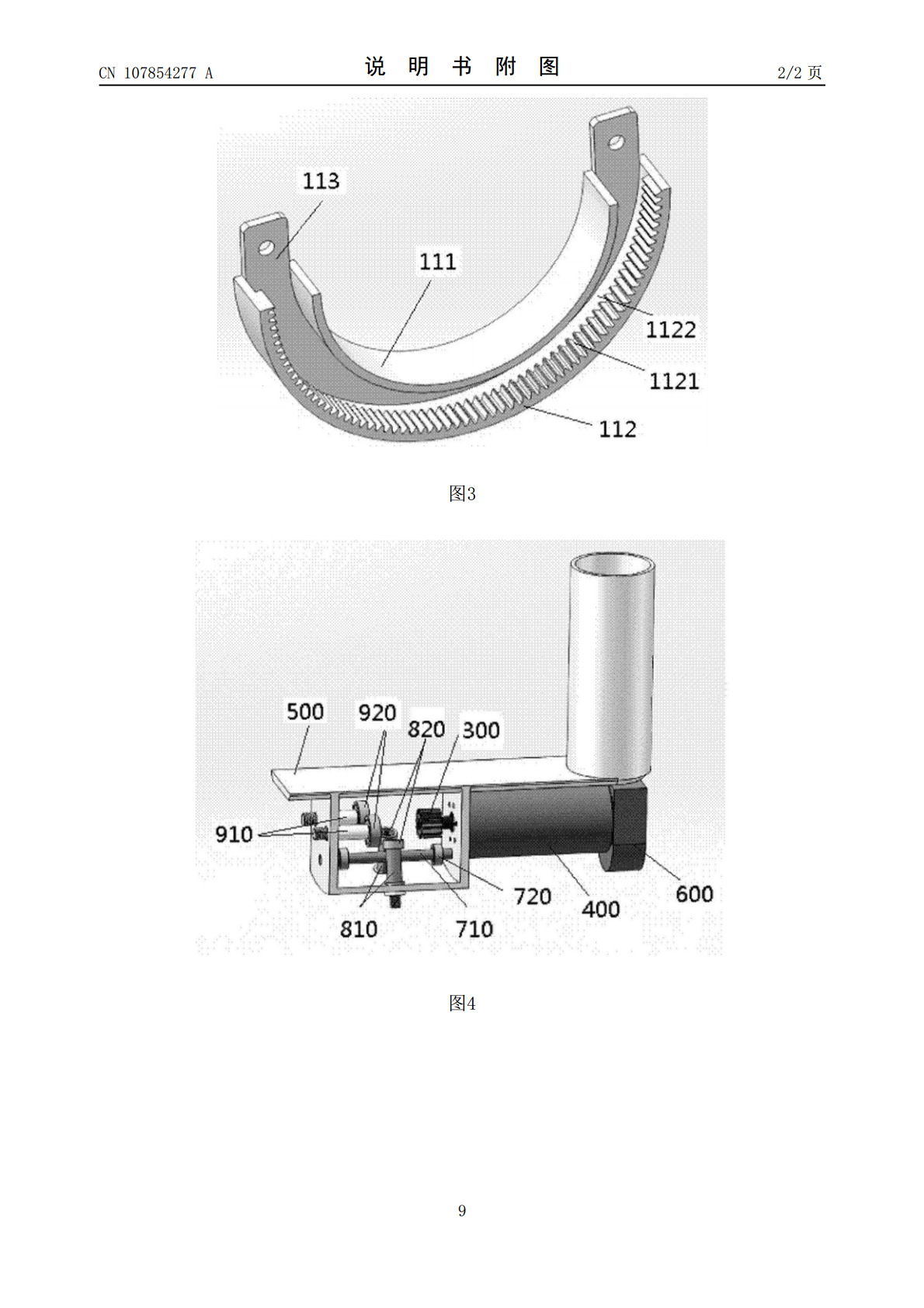
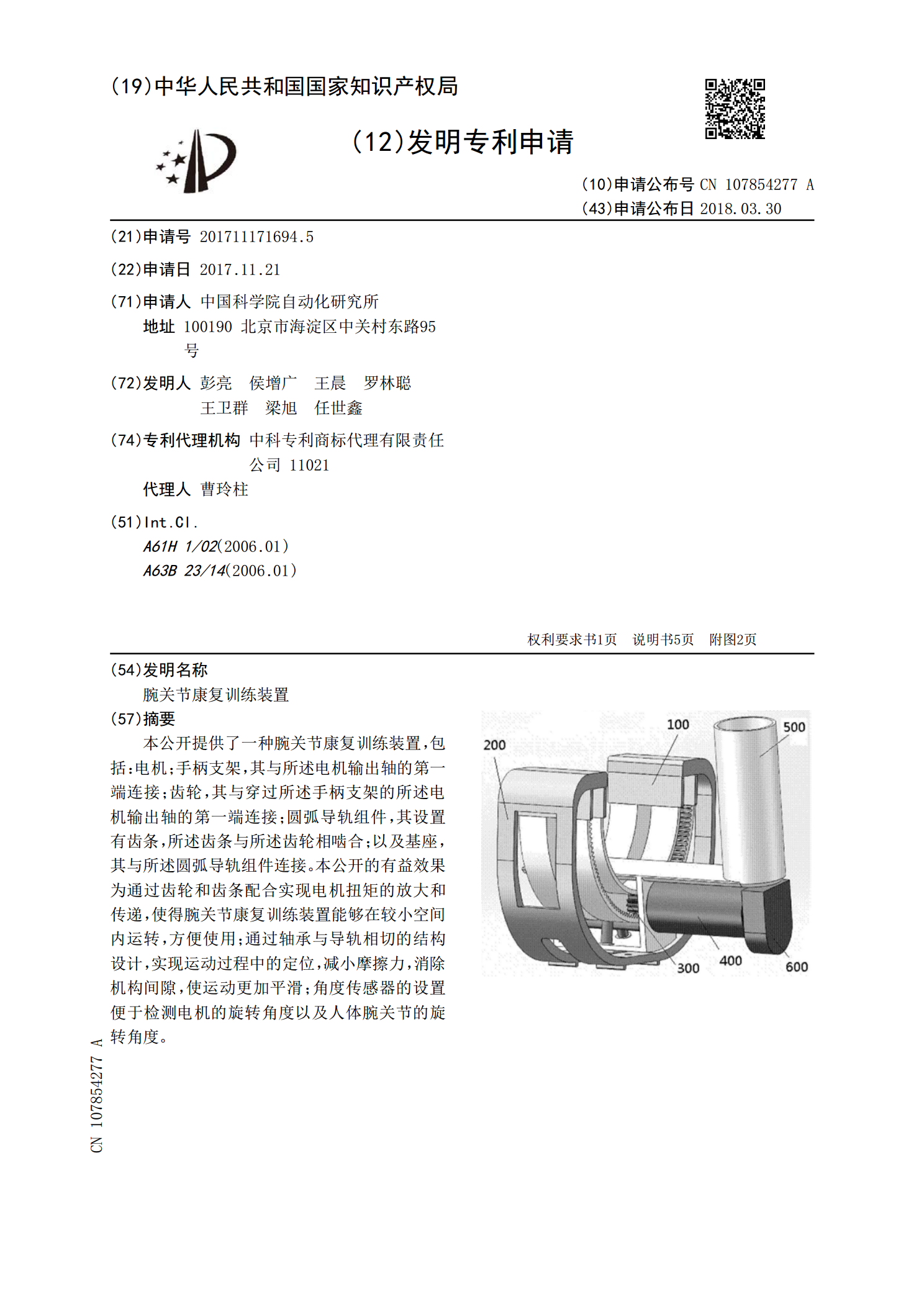
本公开提供了一种腕关节康复训练装置,包括:电机;手柄支架,其与所述电机输出轴的第一端连接;齿轮,其与穿过所述手柄支架的所述电机输出轴的第一端连接;圆弧导轨组件,其设置有齿条,所述齿条与所述齿轮相啮合;以及基座,其与所述圆弧导轨组件连接。本公开的有益效果为通过齿轮和齿条配合实现电机扭矩的放大和传递,使得腕关节康复训练装置能够在较小空间内运转,方便使用;通过轴承与导轨相切的结构设计,实现运动过程中的定位,减小摩擦力,消除机构间隙,使运动更加平滑;角度传感器的设置便于检测电机的旋转角度以及人体腕关节的旋转角度。
一种腕关节康复训练装置.pdf
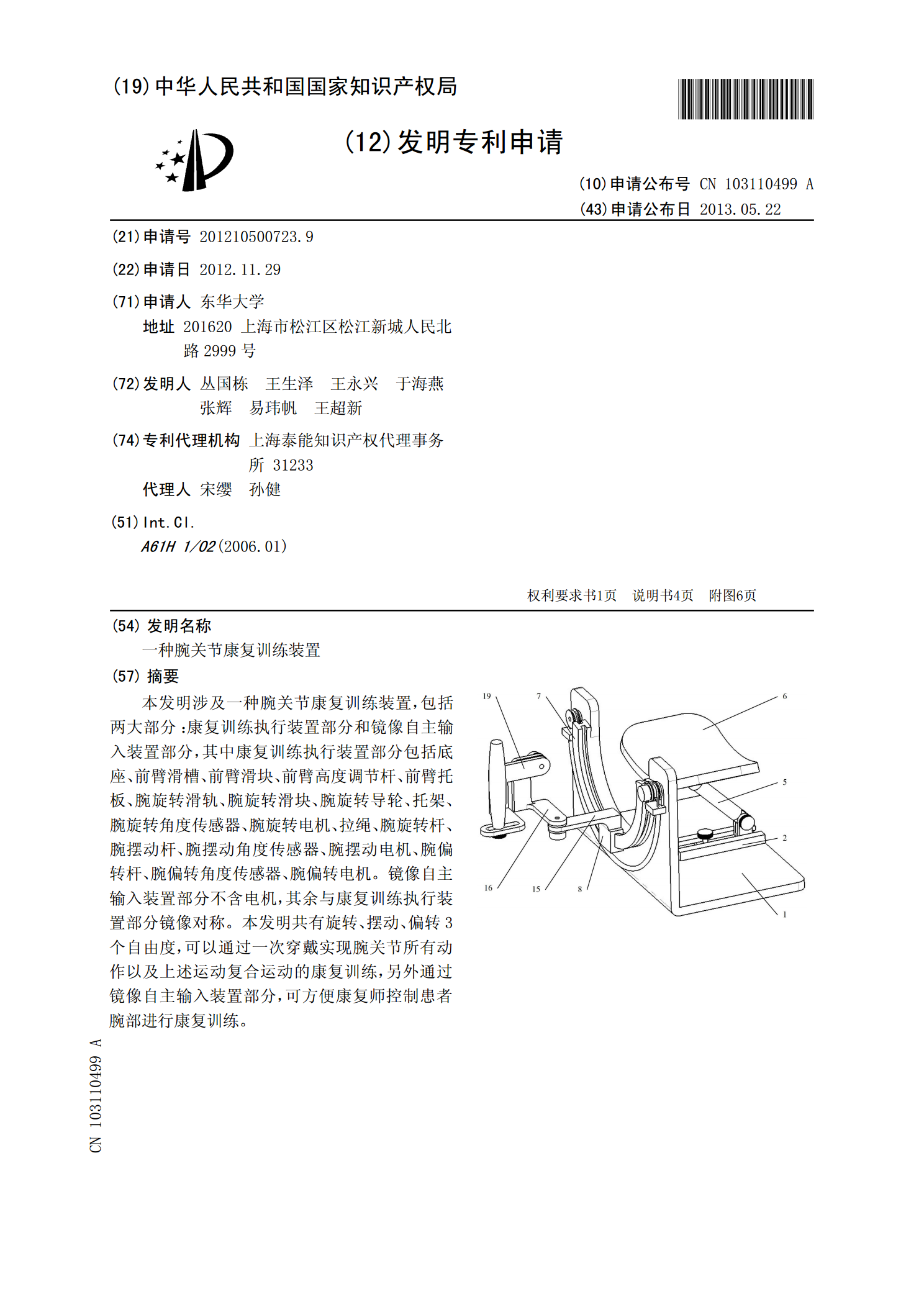
本发明涉及一种腕关节康复训练装置,包括两大部分:康复训练执行装置部分和镜像自主输入装置部分,其中康复训练执行装置部分包括底座、前臂滑槽、前臂滑块、前臂高度调节杆、前臂托板、腕旋转滑轨、腕旋转滑块、腕旋转导轮、托架、腕旋转角度传感器、腕旋转电机、拉绳、腕旋转杆、腕摆动杆、腕摆动角度传感器、腕摆动电机、腕偏转杆、腕偏转角度传感器、腕偏转电机。镜像自主输入装置部分不含电机,其余与康复训练执行装置部分镜像对称。本发明共有旋转、摆动、偏转3个自由度,可以通过一次穿戴实现腕关节所有动作以及上述运动复合运动的康复训练,
一种腕关节背屈掌屈康复训练装置.pdf
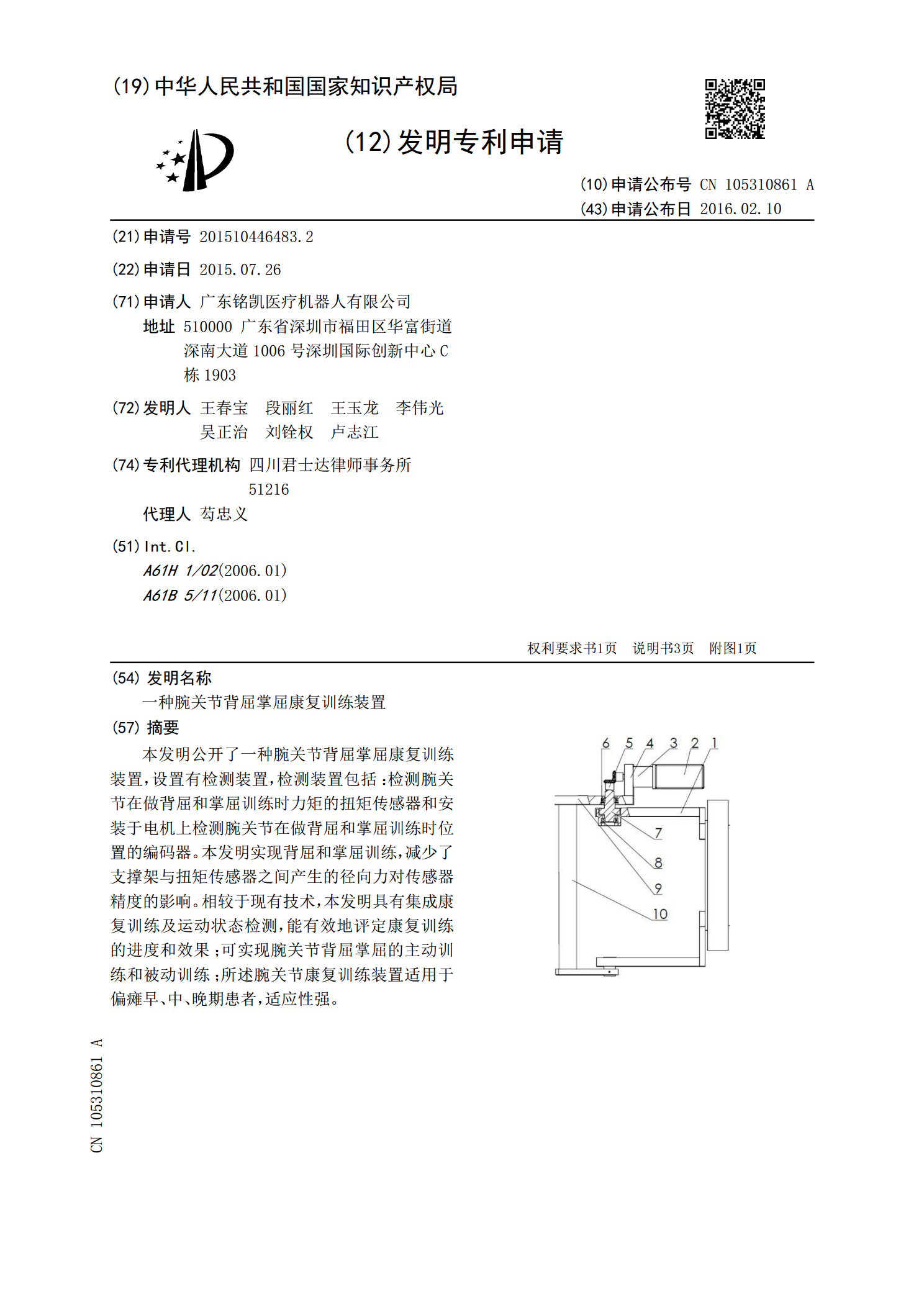
本发明公开了一种腕关节背屈掌屈康复训练装置,设置有检测装置,检测装置包括:检测腕关节在做背屈和掌屈训练时力矩的扭矩传感器和安装于电机上检测腕关节在做背屈和掌屈训练时位置的编码器。本发明实现背屈和掌屈训练,减少了支撑架与扭矩传感器之间产生的径向力对传感器精度的影响。相较于现有技术,本发明具有集成康复训练及运动状态检测,能有效地评定康复训练的进度和效果;可实现腕关节背屈掌屈的主动训练和被动训练;所述腕关节康复训练装置适用于偏瘫早、中、晚期患者,适应性强。
一种基于自适应的并联腕关节康复训练装置.pdf
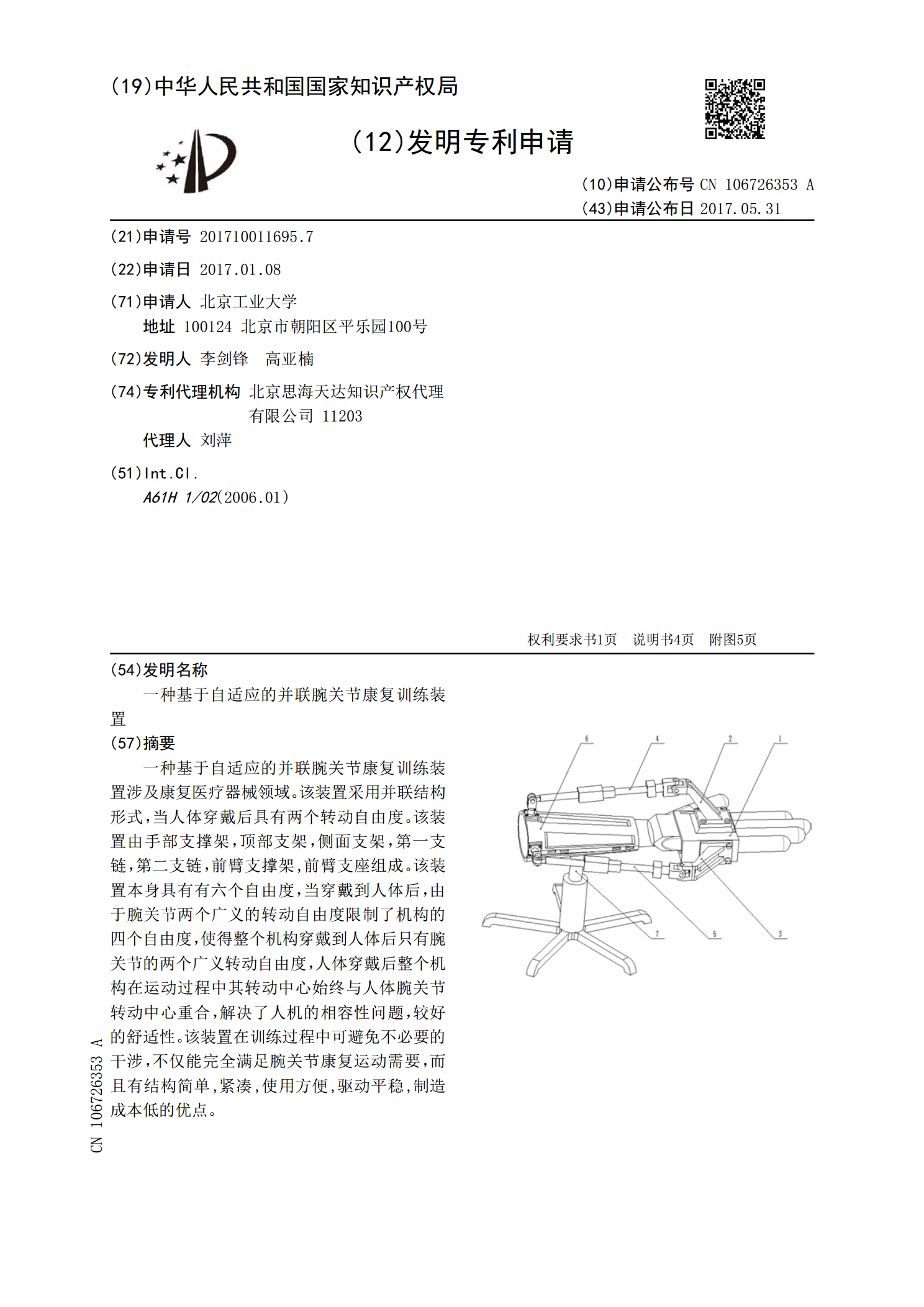
一种基于自适应的并联腕关节康复训练装置涉及康复医疗器械领域。该装置采用并联结构形式,当人体穿戴后具有两个转动自由度。该装置由手部支撑架,顶部支架,侧面支架,第一支链,第二支链,前臂支撑架,前臂支座组成。该装置本身具有有六个自由度,当穿戴到人体后,由于腕关节两个广义的转动自由度限制了机构的四个自由度,使得整个机构穿戴到人体后只有腕关节的两个广义转动自由度,人体穿戴后整个机构在运动过程中其转动中心始终与人体腕关节转动中心重合,解决了人机的相容性问题,较好的舒适性。该装置在训练过程中可避免不必要的干涉,不仅能完
一种上肢康复训练机器人及其腕关节训练装置.pdf
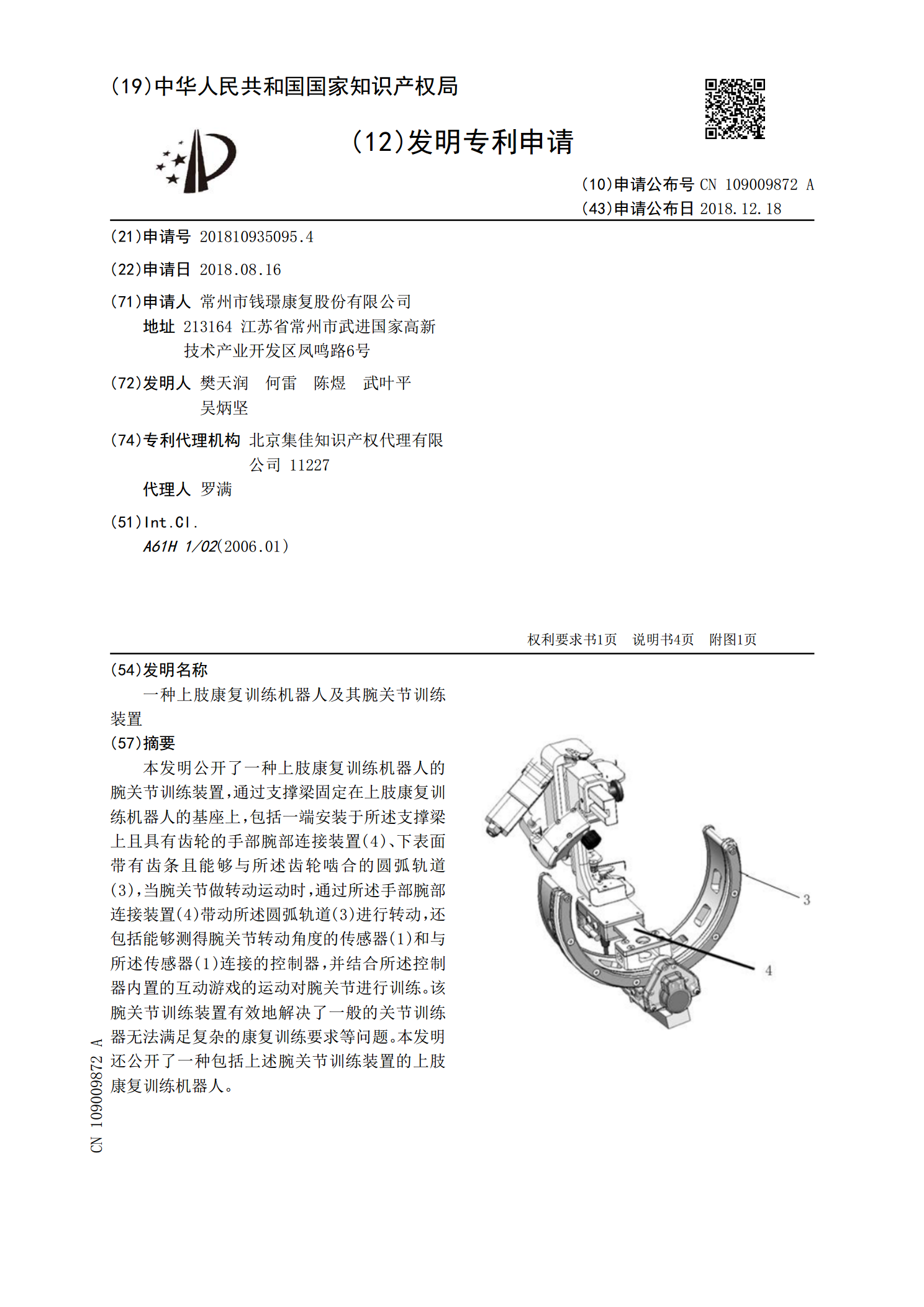
本发明公开了一种上肢康复训练机器人的腕关节训练装置,通过支撑梁固定在上肢康复训练机器人的基座上,包括一端安装于所述支撑梁上且具有齿轮的手部腕部连接装置(4)、下表面带有齿条且能够与所述齿轮啮合的圆弧轨道(3),当腕关节做转动运动时,通过所述手部腕部连接装置(4)带动所述圆弧轨道(3)进行转动,还包括能够测得腕关节转动角度的传感器(1)和与所述传感器(1)连接的控制器,并结合所述控制器内置的互动游戏的运动对腕关节进行训练。该腕关节训练装置有效地解决了一般的关节训练器无法满足复杂的康复训练要求等问题。本发明还