
一种基于线结构光的斜齿轮齿向偏差测量方法.pdf

飞舟****文章


1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于线结构光的斜齿轮齿向偏差测量方法.pdf
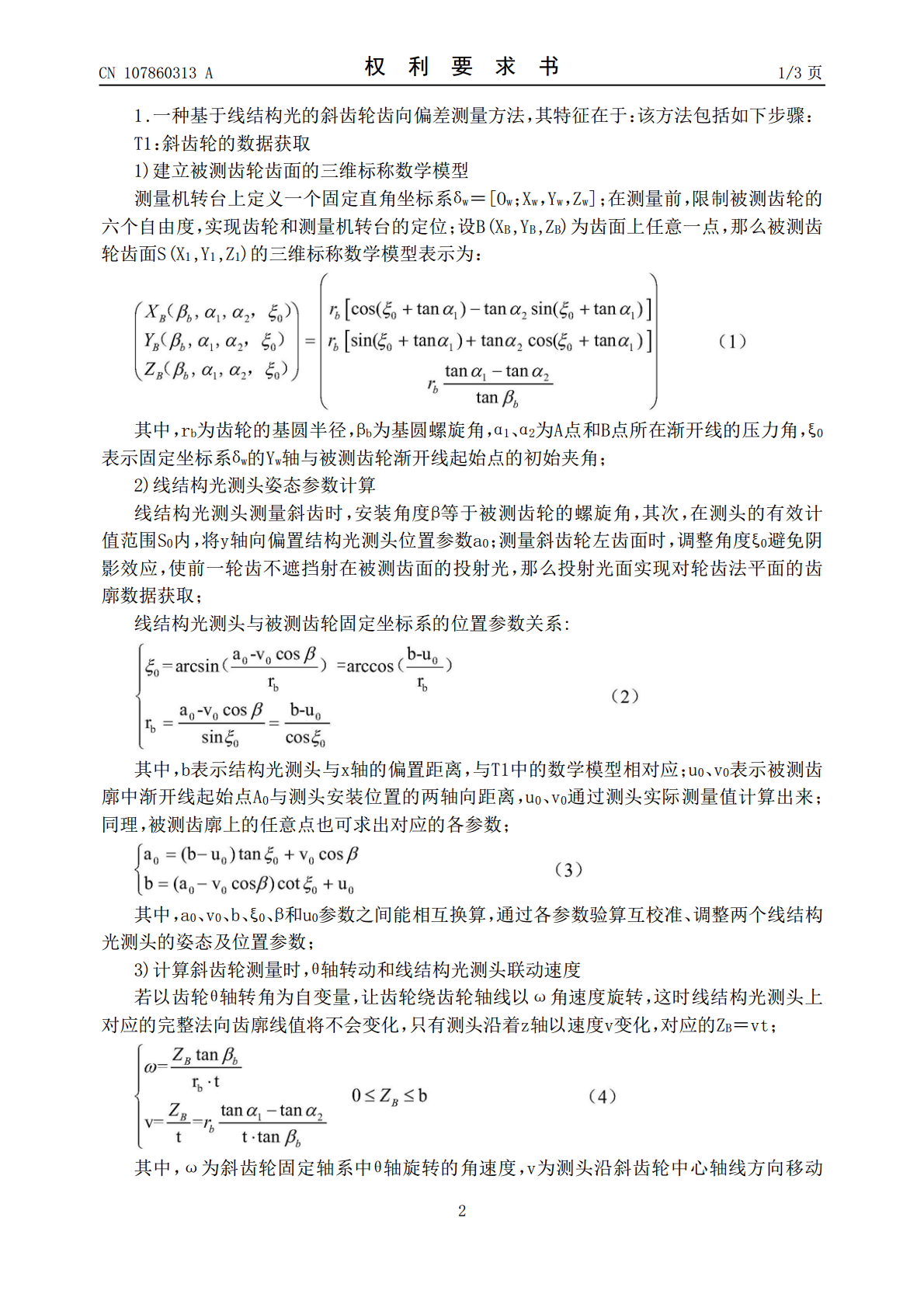
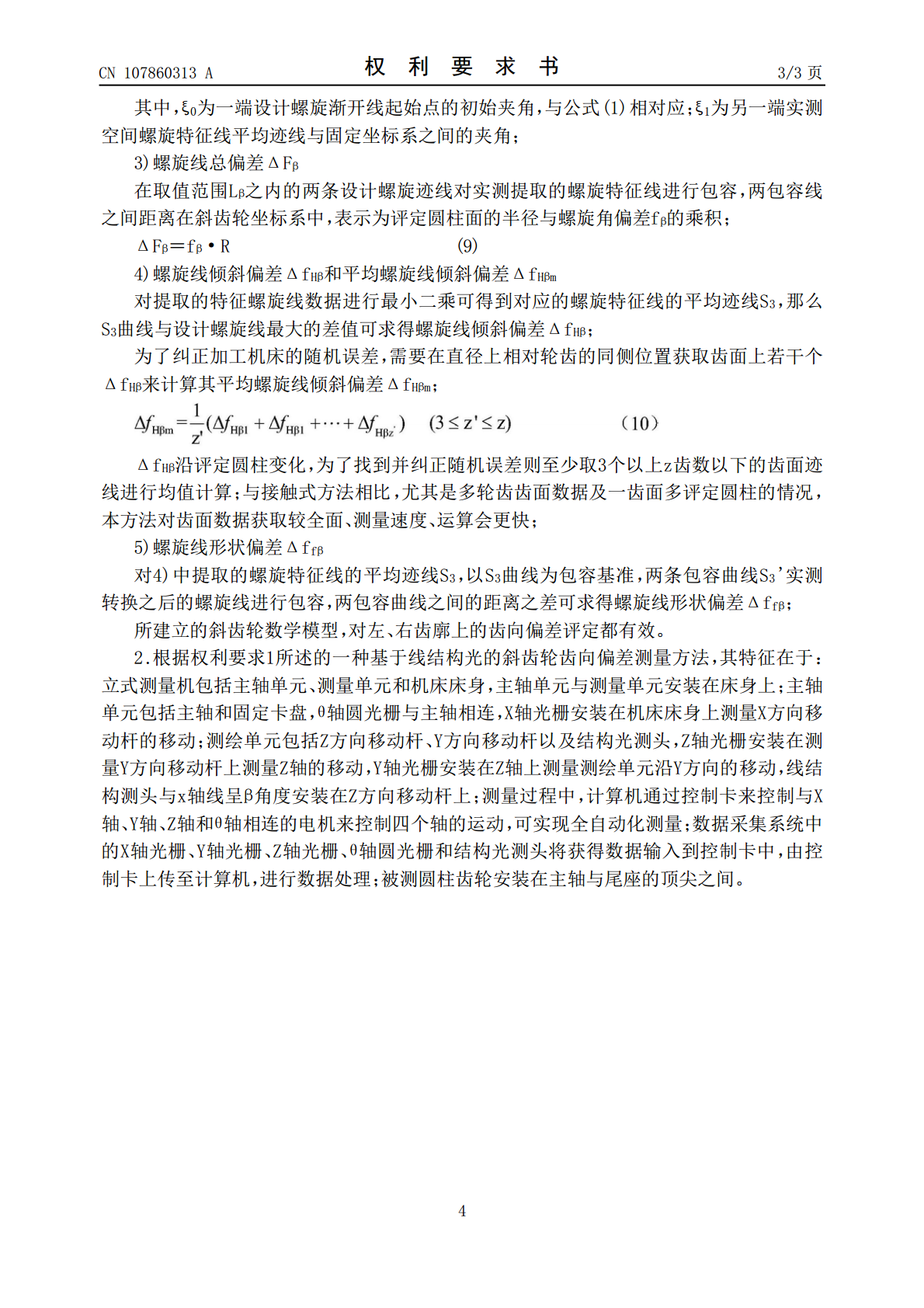
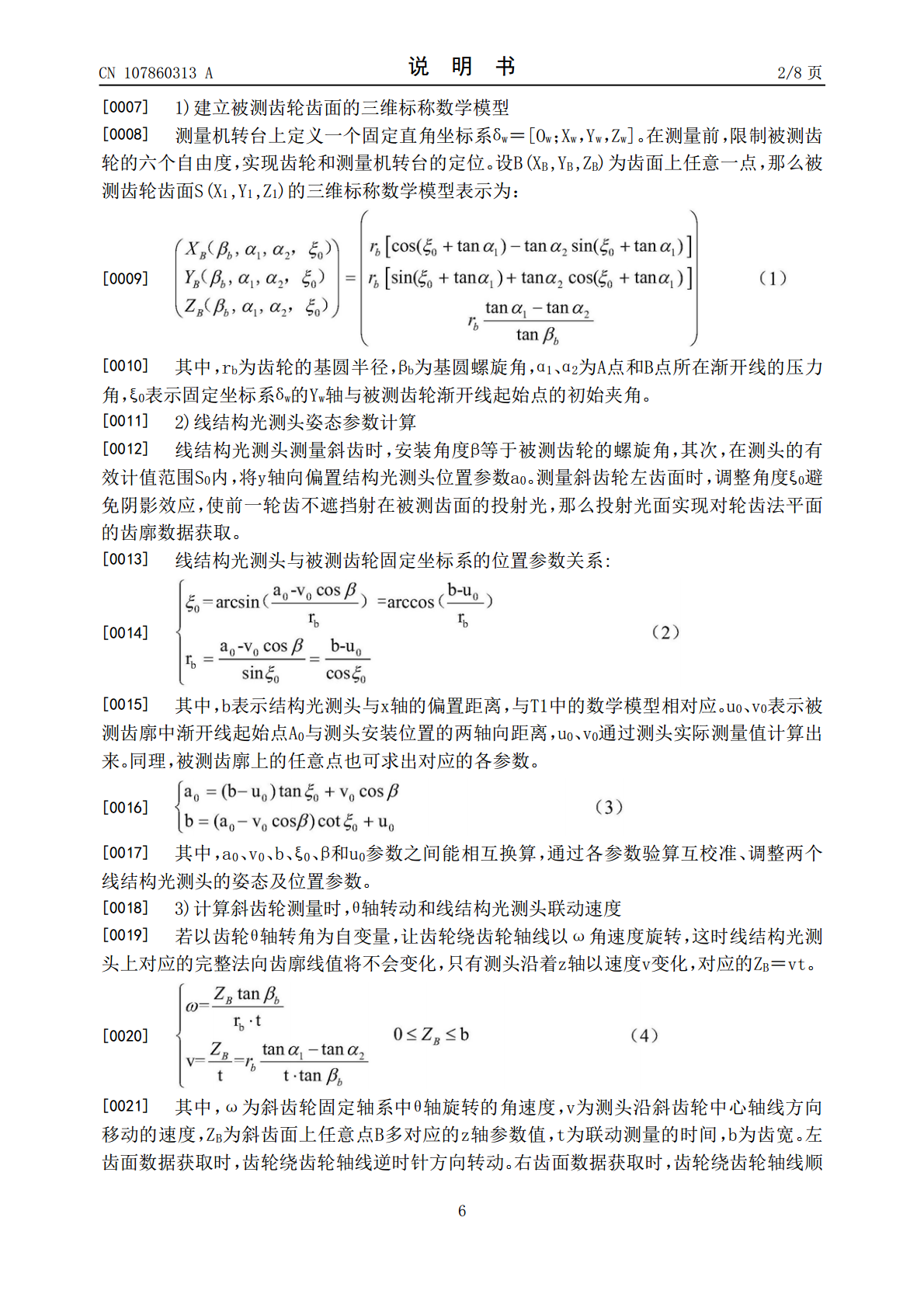
本发明公开了一种基于线结构光的斜齿轮齿向偏差测量方法,属于精密测试技术与仪器、齿轮检测技术领域。该方法首先斜齿轮的数据获取,转换数据至斜齿轮坐标系,建立齿轮齿向偏差数学模型,建立的斜齿轮数学模型,对左、右齿廓上的齿向偏差评定都有效。本发明通过一个线结构光测头即可快速获取斜齿轮左右齿面数据,提取有效的特征螺旋线数据;数据稳定且比一般方法数据全面、效率更高;因此可准确提取齿面上任意螺旋特征线;通过建立理论三维坐标模型和测头安装参数的调整函数,初始角ξ

一种基于线结构光的圆柱齿轮齿距偏差测量方法.pdf
本发明公开了一种基于线结构光的圆柱齿轮齿距偏差测量方法,该方法包括建立被测齿轮齿面的三维数学模型;测量轮齿右表面时,调整角度

一种基于线结构光的圆柱齿轮齿廓偏差测量方法.pdf
本发明公开了一种基于线结构光的圆柱齿轮齿廓偏差测量方法,该方法首先建立被测齿轮齿面的三维标称数学模型,结构光由间距相等的一系列光斑组成,基于结构光本身特性并在结构光的有效计值范围内。建立齿轮齿廓偏差项的数学模型;最终实现对圆柱齿轮的齿廓总偏差、齿廓倾斜偏差、齿廓形状偏差的高精度测量。本发明可实现在较复杂环境对圆柱齿轮各轮齿进行检测,测量速度快、效率高;能适应多种类型的圆柱齿轮检测,不存在测头磨损和半径补偿的问题;通过大数据能提高测量的精度,重复性好,避免齿轮检测中的阴影效应。能同时对转换到齿轮坐标系的所有
一种基于线结构光的齿轮齿厚测量方法.pdf
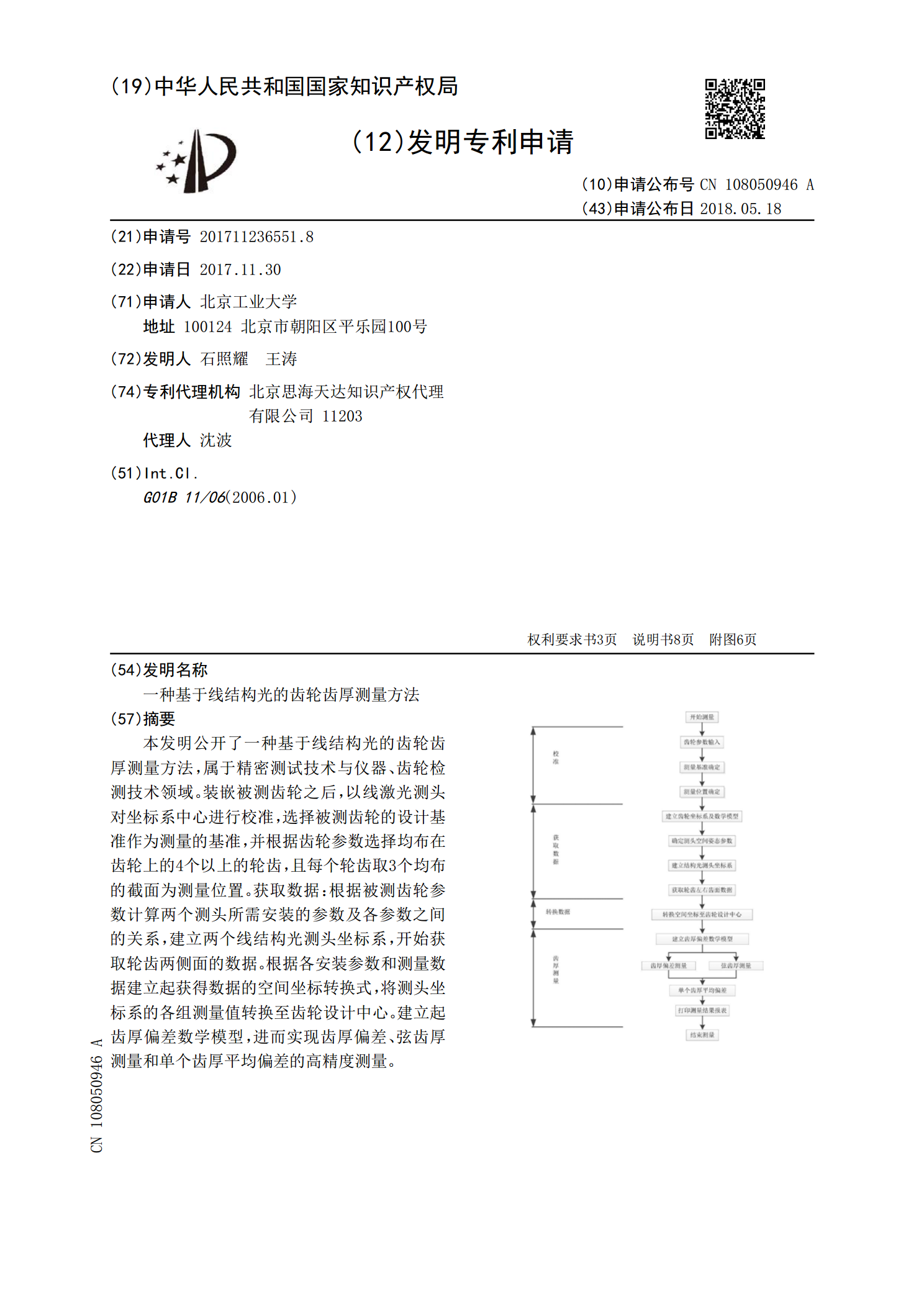
本发明公开了一种基于线结构光的齿轮齿厚测量方法,属于精密测试技术与仪器、齿轮检测技术领域。装嵌被测齿轮之后,以线激光测头对坐标系中心进行校准,选择被测齿轮的设计基准作为测量的基准,并根据齿轮参数选择均布在齿轮上的4个以上的轮齿,且每个轮齿取3个均布的截面为测量位置。获取数据:根据被测齿轮参数计算两个测头所需安装的参数及各参数之间的关系,建立两个线结构光测头坐标系,开始获取轮齿两侧面的数据。根据各安装参数和测量数据建立起获得数据的空间坐标转换式,将测头坐标系的各组测量值转换至齿轮设计中心。建立起齿厚偏差数学

基于线结构光的超精密齿轮齿距偏差测量分析.pptx
汇报人:目录PARTONEPARTTWO结构光测量技术简介线结构光测量原理测量系统组成测量精度与误差分析PARTTHREE齿轮齿距偏差定义齿距偏差测量方法基于线结构光的测量流程测量结果可靠性分析PARTFOUR实验设备与环境实验步骤与操作实验数据收集与处理结果对比与分析PARTFIVE误差来源分析误差补偿方法测量系统优化方案优化效果评估PARTSIX线结构光测量技术的应用领域超精密齿轮齿距偏差测量的重要性未来发展方向与挑战THANKYOU