
风力发电机变桨系统的控制方法和装置.pdf

书生****瑞梦

1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
风力发电机变桨系统的控制方法和装置.pdf
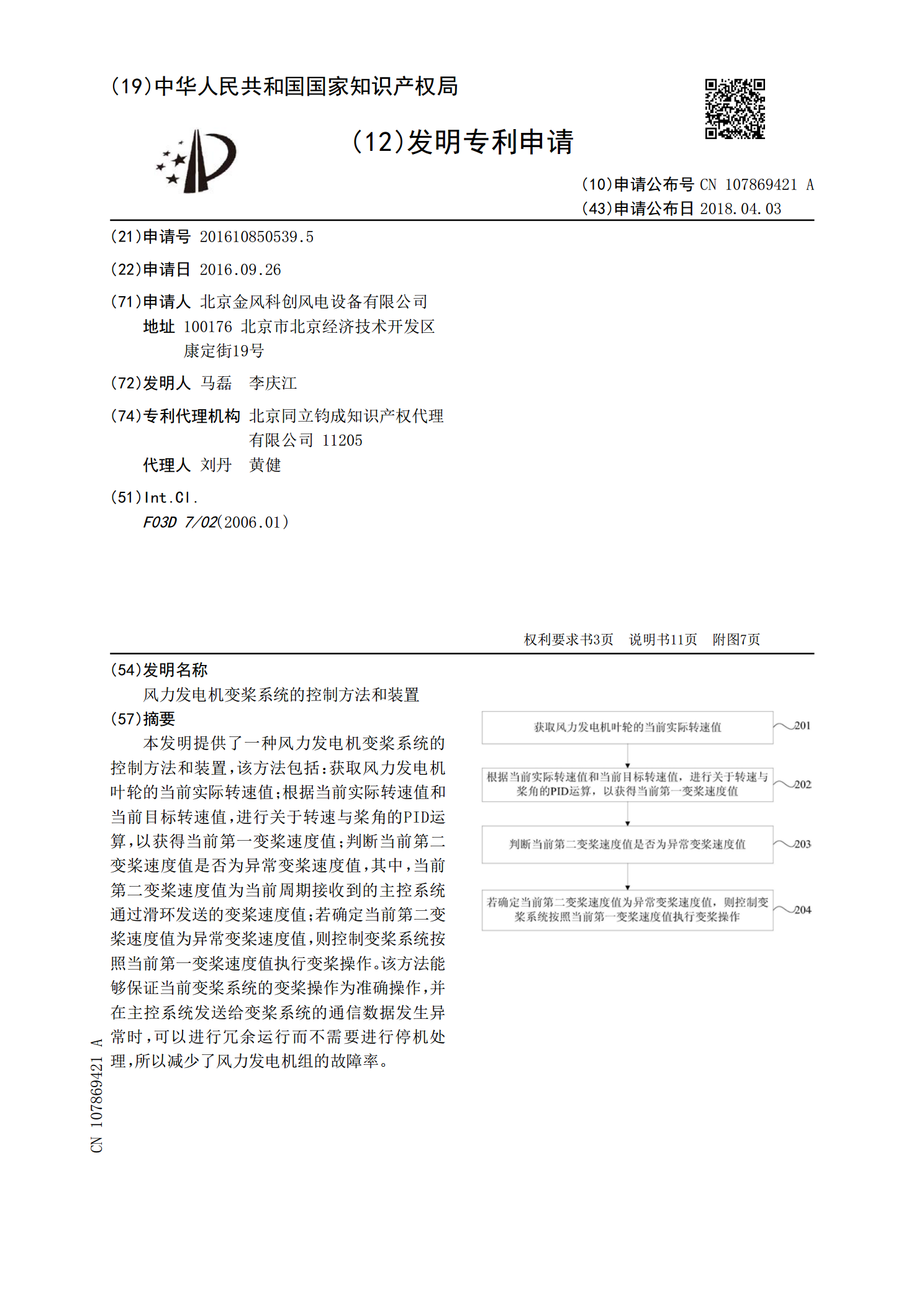
本发明提供了一种风力发电机变桨系统的控制方法和装置,该方法包括:获取风力发电机叶轮的当前实际转速值;根据当前实际转速值和当前目标转速值,进行关于转速与桨角的PID运算,以获得当前第一变桨速度值;判断当前第二变桨速度值是否为异常变桨速度值,其中,当前第二变桨速度值为当前周期接收到的主控系统通过滑环发送的变桨速度值;若确定当前第二变桨速度值为异常变桨速度值,则控制变桨系统按照当前第一变桨速度值执行变桨操作。该方法能够保证当前变桨系统的变桨操作为准确操作,并在主控系统发送给变桨系统的通信数据发生异常时,可以进行

风力发电机变桨距控制系统.pdf
本发明提供了一种风力发电机变桨距控制系统,包括轮毂,设置在轮毂内的主控箱、轴控箱、后备电源箱、电机及传动装置,所述主控箱控制若干个并联的轴控箱,每一个轴控箱单独控制一组电机,所述主控箱箱体的壁呈六边形设置,所述主控箱箱体内设有PLC控制单元,所述轴控箱和后备电源箱的壁均呈六边形设置。本发明的有益效果主要体现在:PLC控制单元实现了桨叶转角位置、电池充电、箱体温度控制、故障处理等多项功能;主控箱和轴控箱、后备电源箱都采用六边形结构,使各个箱内的空间最大化,使每个箱内可以放置更多的电气器件或电池组

风力发电机变桨系统控制电源.pdf
一种风力发电机变桨系统控制电源,包括AC/DC电源模块,AC/DC电源模块的输入由UPS电源给定,在AC/DC电源模块上连接有用作对AC/DC电源模块的工作状态进行监测的PLC控制器,当AC/DC电源模块工作状态异常时,PLC控制器将监测信息及时反馈给风力发电机的主控系统,由主控系统控制变桨系统停机;所述控制电源还包括DC/DC电源模块,该DC/DC电源模块的输入由变桨系统的超级电容给定,DC/DC电源模块的输出端通过二极管高选电路并入AC/DC电源模块的输出端,AC/DC电源模块在通电状态时的输出电压始

风力发电机变桨控制新版系统培训教材.doc
变桨控制系统培训教材1.变桨控制系统概述撞块装置变桨控制柜雷电保护装置轮毂变桨驱动器变桨轴承限位开关装置图1变桨系统变桨控制系统涉及三个重要部件,驱动装置-电机,齿轮箱和变桨轴承。从额定功率起,通过控制系统将叶片以精细变桨角度向顺桨方向转动,实现风机功率控制。如果一种驱动器发生故障,另两个驱动器可以安全地使风机停机。变桨控制系统是通过变化叶片迎角,实现功率变化来进行调节。通过在叶片和轮毂之间安装变桨驱动电机带动回转轴承转动从而变化叶片迎角,由此控制叶片升力,以达到控制作用在风轮叶片上扭矩和功率目。在90度
小型风力发电机变桨控制机构.pdf
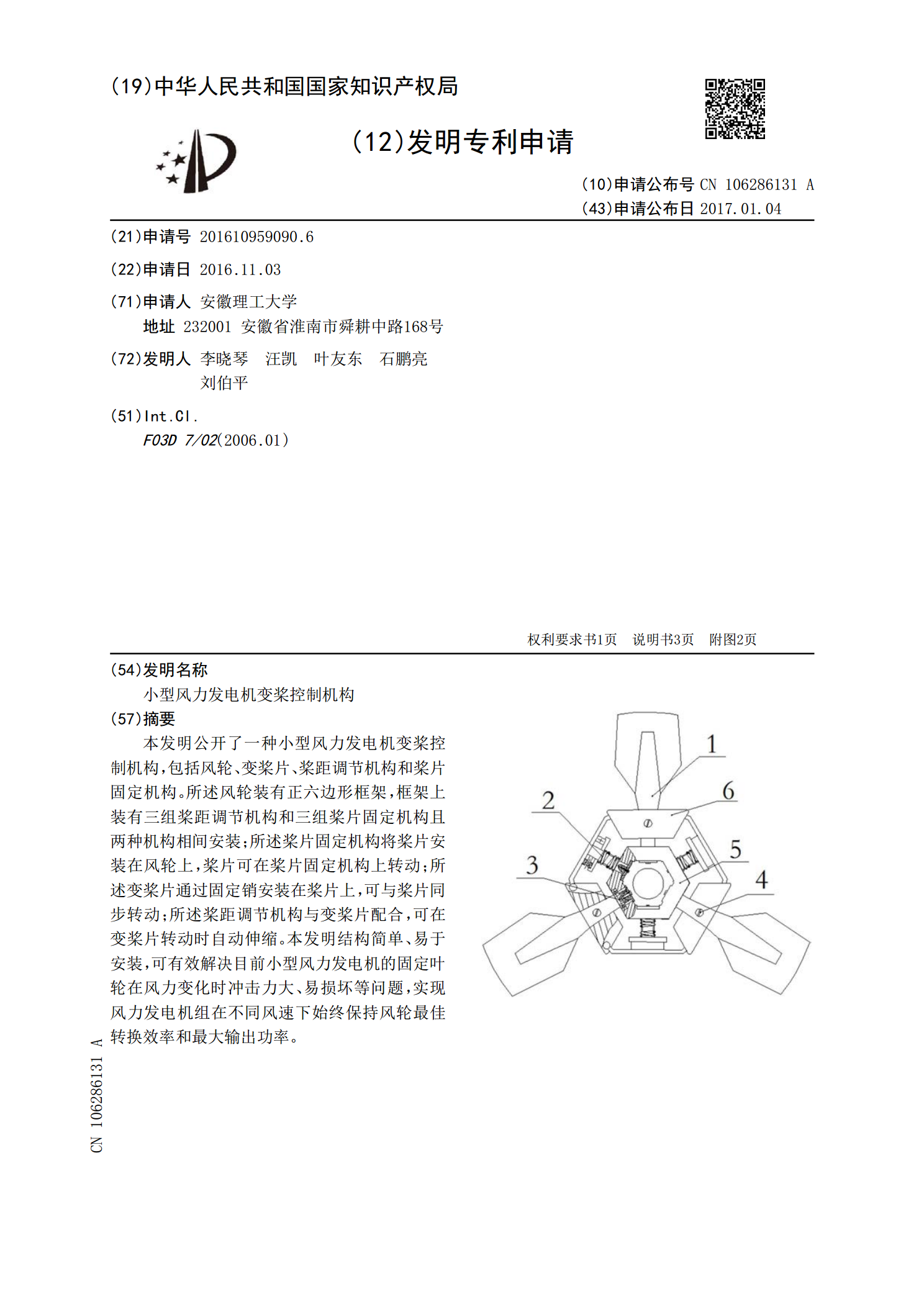
本发明公开了一种小型风力发电机变桨控制机构,包括风轮、变桨片、桨距调节机构和桨片固定机构。所述风轮装有正六边形框架,框架上装有三组桨距调节机构和三组桨片固定机构且两种机构相间安装;所述桨片固定机构将桨片安装在风轮上,桨片可在桨片固定机构上转动;所述变桨片通过固定销安装在桨片上,可与桨片同步转动;所述桨距调节机构与变桨片配合,可在变桨片转动时自动伸缩。本发明结构简单、易于安装,可有效解决目前小型风力发电机的固定叶轮在风力变化时冲击力大、易损坏等问题,实现风力发电机组在不同风速下始终保持风轮最佳转换效率和最大