
一种基于Kinect深度信息的指尖检测方法.pdf

是湛****21

1/7
2/7
3/7
4/7
5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于Kinect深度信息的指尖检测方法.pdf
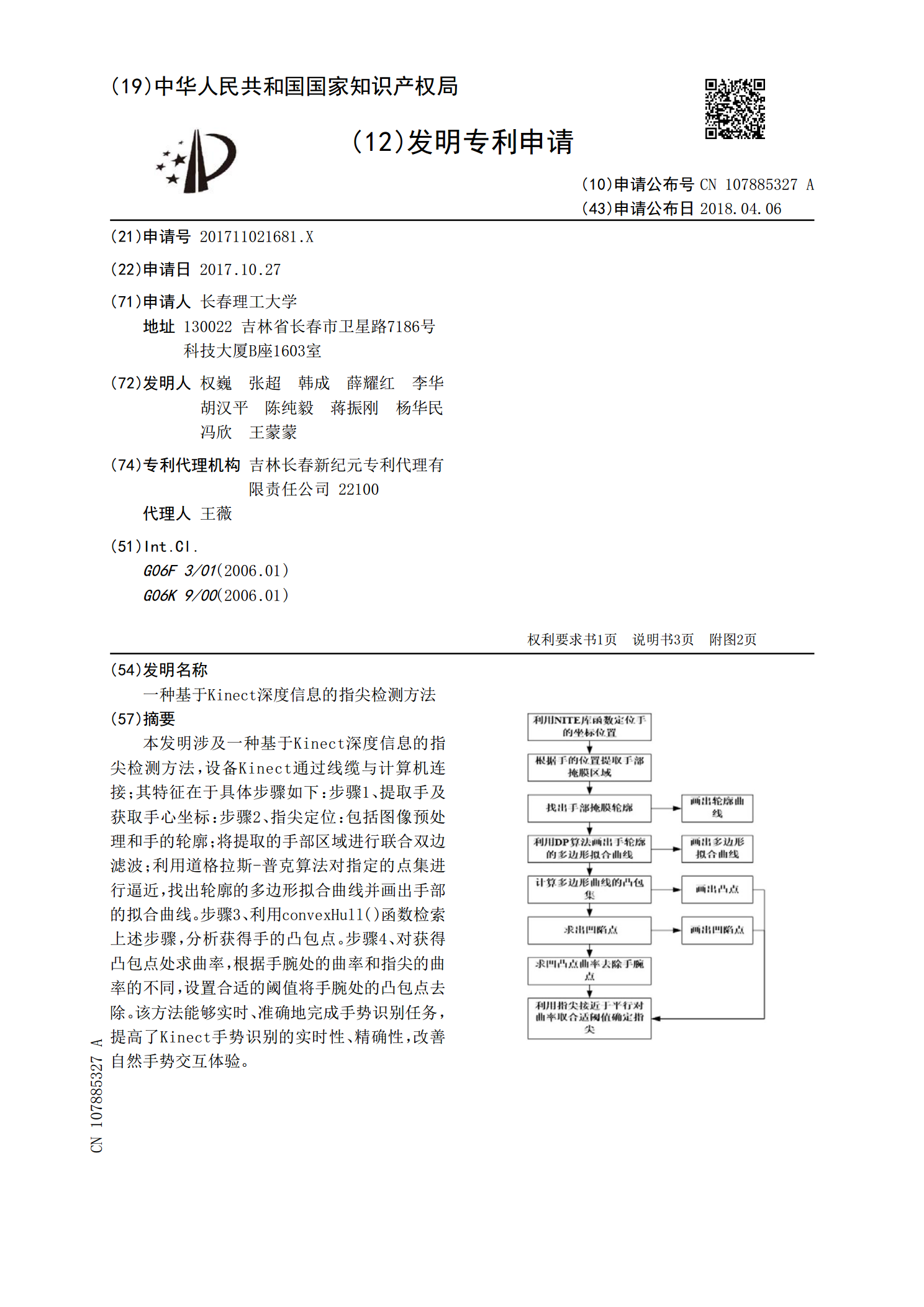
本发明涉及一种基于Kinect深度信息的指尖检测方法,设备Kinect通过线缆与计算机连接;其特征在于具体步骤如下:步骤1、提取手及获取手心坐标:步骤2、指尖定位:包括图像预处理和手的轮廓;将提取的手部区域进行联合双边滤波;利用道格拉斯‑普克算法对指定的点集进行逼近,找出轮廓的多边形拟合曲线并画出手部的拟合曲线。步骤3、利用convexHull()函数检索上述步骤,分析获得手的凸包点。步骤4、对获得凸包点处求曲率,根据手腕处的曲率和指尖的曲率的不同,设置合适的阈值将手腕处的凸包点去除。该方法能够实时、准确

基于Kinect骨骼信息与深度图像的指尖点检测.docx
基于Kinect骨骼信息与深度图像的指尖点检测基于Kinect骨骼信息与深度图像的指尖点检测摘要:指尖点检测在许多基于人体动作识别和手势交互的应用中起着重要作用。本文研究了基于Kinect骨骼信息与深度图像的指尖点检测方法。首先,利用Kinect传感器获取人体的骨骼信息和深度图像。然后,通过对骨骼信息进行处理,提取手部的关键点。接下来,根据深度图像,利用图像处理技术检测出手部的轮廓。最后,根据手部关键点和轮廓信息,识别出指尖点。实验结果表明,所提出的方法在指尖点检测精度上具有较高的准确性和稳定性。关键词:

基于Kinect深度图像的指尖识别及手势判定.docx
基于Kinect深度图像的指尖识别及手势判定摘要:手势识别技术在许多领域,如虚拟实境、交互式计算机游戏、智能交通、医学等领域中都有广泛的应用。而Kinect深度图像技术作为一种专门用于3D立体成像和实时运动追踪的传感器设备,可以有效地解决传统摄像头的束缚问题。本篇论文就基于Kinect深度图像技术,设计并实现了一种指尖识别的手势识别系统,并通过实验验证了该系统的准确性和实用性。关键词:Kinect深度图像,手势识别,指尖识别1.研究背景随着科技的不断发展,手势识别技术得到了越来越广泛的应用。在虚拟实境中,

一种基于深度信息的指尖检测和手势识别方法与系统.pdf
本发明公开了一种基于深度信息的指尖检测和手势识别方法,包括:获取包含有手势信息的深度图像,并采用阈值法对手部进行粗略分割,得到带有部分前臂区域的手部形状;通过检测手腕特征标识实现手部区域的精确分割,并提取手部轮廓曲线;利用离散曲线演化方法简化手部轮廓曲线,得到包含指尖信息的手部简化折线;采用阈值法在手部简化折线上检测手指指尖;根据手部简化折线中包含的指尖个数以及设定的手势模型对所述手势进行识别。本发明方法能够准确分割手部区域,同时检测手指指尖并识别手势。本发明还提供了相应的基于深度信息的指尖检测与手势识别

基于人体骨骼和深度图像信息的指尖检测方法.docx
基于人体骨骼和深度图像信息的指尖检测方法基于人体骨骼和深度图像信息的指尖检测方法摘要:指尖检测在人机交互、手势识别、虚拟现实等领域具有重要意义。本文提出了一种基于人体骨骼和深度图像信息的指尖检测方法。首先,通过深度相机获取人体的深度图像。然后,利用深度图像进行人体骨骼检测。最后,通过骨骼信息推断出指尖的位置。实验结果表明,该方法具有较高的准确率和鲁棒性。关键词:指尖检测,人体骨骼,深度图像,准确率,鲁棒性1.引言指尖检测是计算机视觉领域的一个重要研究方向,它在人机交互、手势识别、虚拟现实等应用中扮演着重要