
自平衡载具.pdf

觅松****哥哥

1/10
2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共64页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

自平衡载具.pdf
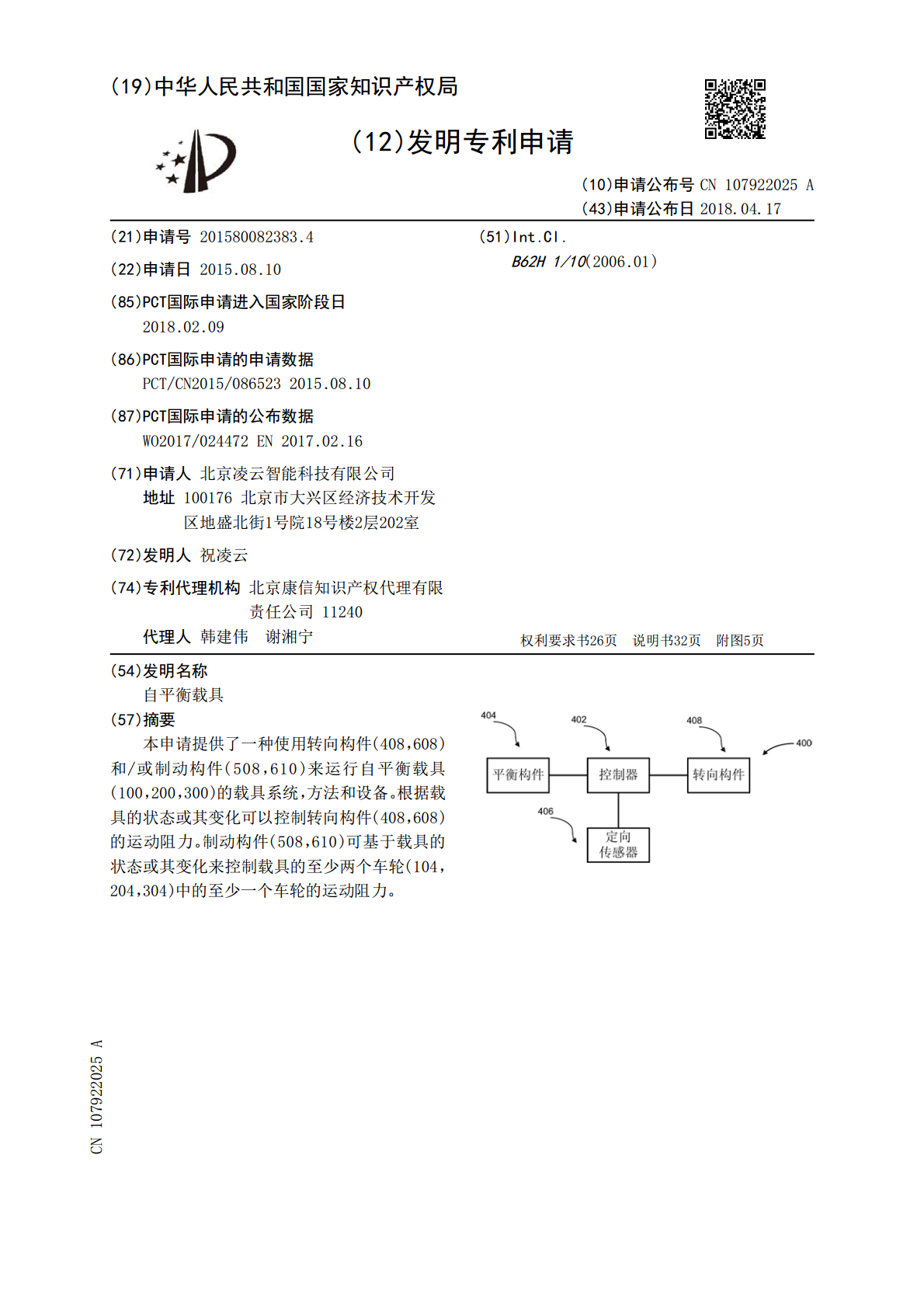
本申请提供了一种使用转向构件(408,608)和/或制动构件(508,610)来运行自平衡载具(100,200,300)的载具系统,方法和设备。根据载具的状态或其变化可以控制转向构件(408,608)的运动阻力。制动构件(508,610)可基于载具的状态或其变化来控制载具的至少两个车轮(104,204,304)中的至少一个车轮的运动阻力。

两轮自平衡载具的设计.docx
两轮自平衡载具的设计IntroductionTwo-wheelbalancingvehicles,alsocalledSegway-likevehicles,havebecomewidelypopularinrecentyearsthankstotheirbalancecontrolmechanism,whichusesaccelerometersandgyroscopestomeasurethetiltangleofthevehicle'sbodyandadjustthespeedofthewheels

一种载人球形载具的运动分析与自平衡控制.docx
一种载人球形载具的运动分析与自平衡控制摘要:球形载具是近年来发展迅速的新型交通工具,它具有灵活性、适应性强、空间利用率高等优点,在城市通行和旅游观光方面有很大应用前景。为了实现球形载具的自平衡控制和优秀的运动性能,本文分析了球形载具的运动特性和自平衡机理,并基于PID控制器设计了自平衡控制算法。通过对实验样机的运动分析和仿真模拟,验证了该控制算法的有效性和高效性。本研究对球形载具的发展和运动控制具有重要意义。关键词:球形载具;运动分析;自平衡控制;PID控制器;仿真模拟。1.研究背景球形载具是一种新型交通
结合平衡车的载具.pdf
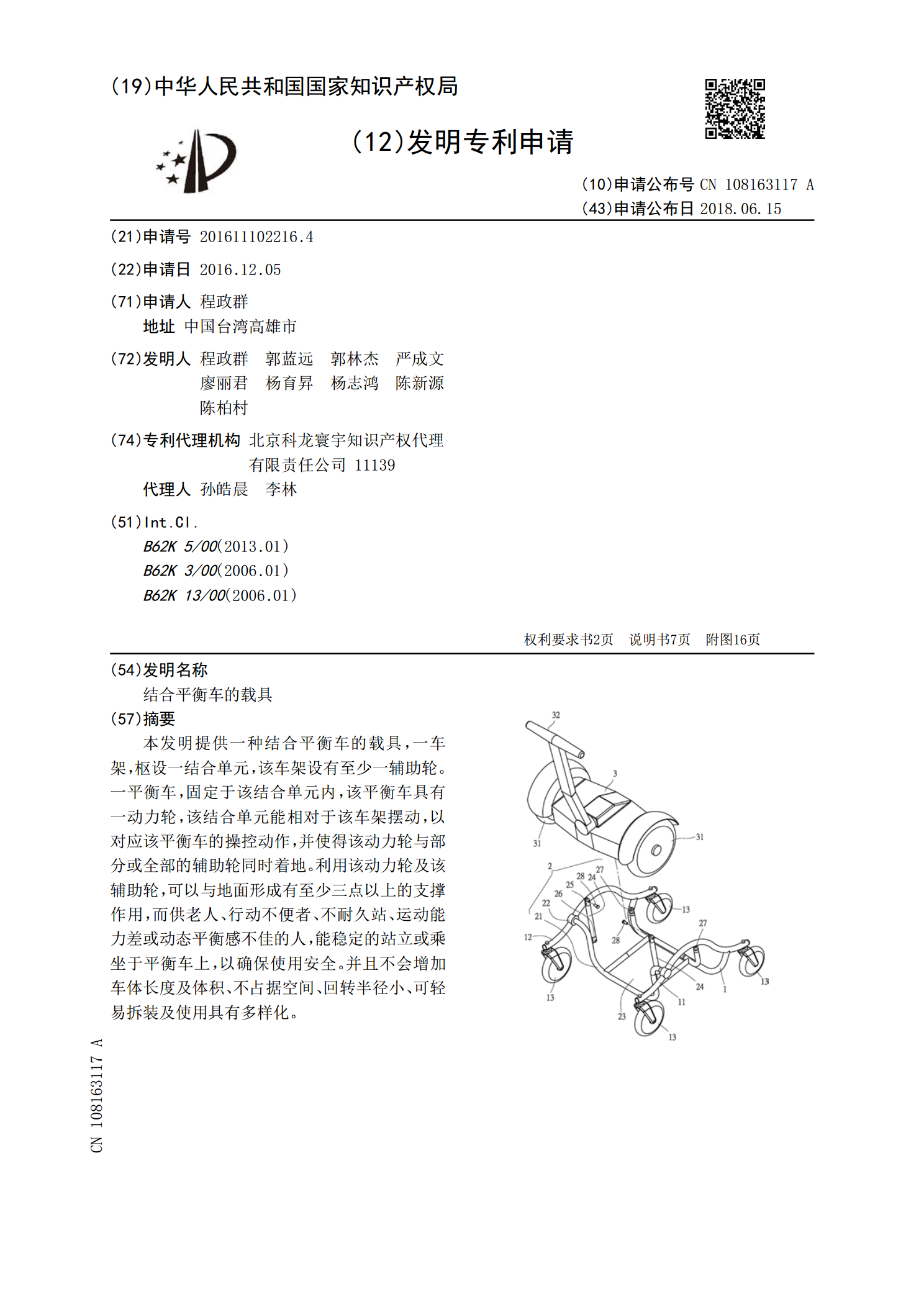
本发明提供一种结合平衡车的载具,一车架,枢设一结合单元,该车架设有至少一辅助轮。一平衡车,固定于该结合单元内,该平衡车具有一动力轮,该结合单元能相对于该车架摆动,以对应该平衡车的操控动作,并使得该动力轮与部分或全部的辅助轮同时着地。利用该动力轮及该辅助轮,可以与地面形成有至少三点以上的支撑作用,而供老人、行动不便者、不耐久站、运动能力差或动态平衡感不佳的人,能稳定的站立或乘坐于平衡车上,以确保使用安全。并且不会增加车体长度及体积、不占据空间、回转半径小、可轻易拆装及使用具有多样化。

自我平衡的移动载具.pdf
本发明公开了一种自我平衡的移动载具,不同于现有技术中的两轮移动载具必须依靠驾驶者的体感操作才能够移动行驶,自我平衡的移动载具搭载由操控单元与作动单元所组成的移动控制模块;驾驶者便可以通过该操控单元控制该作动单元进行作动,使得设置于该作动单元上的陀螺仪向前倾斜或向后倾斜,达到轻易控制该自我平衡的移动载具向前或向后行驶的效果。此外,不同于现有技术中的两轮移动载具搭载至少三个陀螺仪,自我平衡的移动载具仅搭载由陀螺仪与加速计所组成的平衡状态侦测模块便能够实现相同于现有技术中的两轮移动载具的基础功能;相较于现有技术