
一种主动式螺纹及轮廓扫描装置及方法.pdf

一条****丹淑


1/10

2/10
3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种主动式螺纹及轮廓扫描装置及方法.pdf
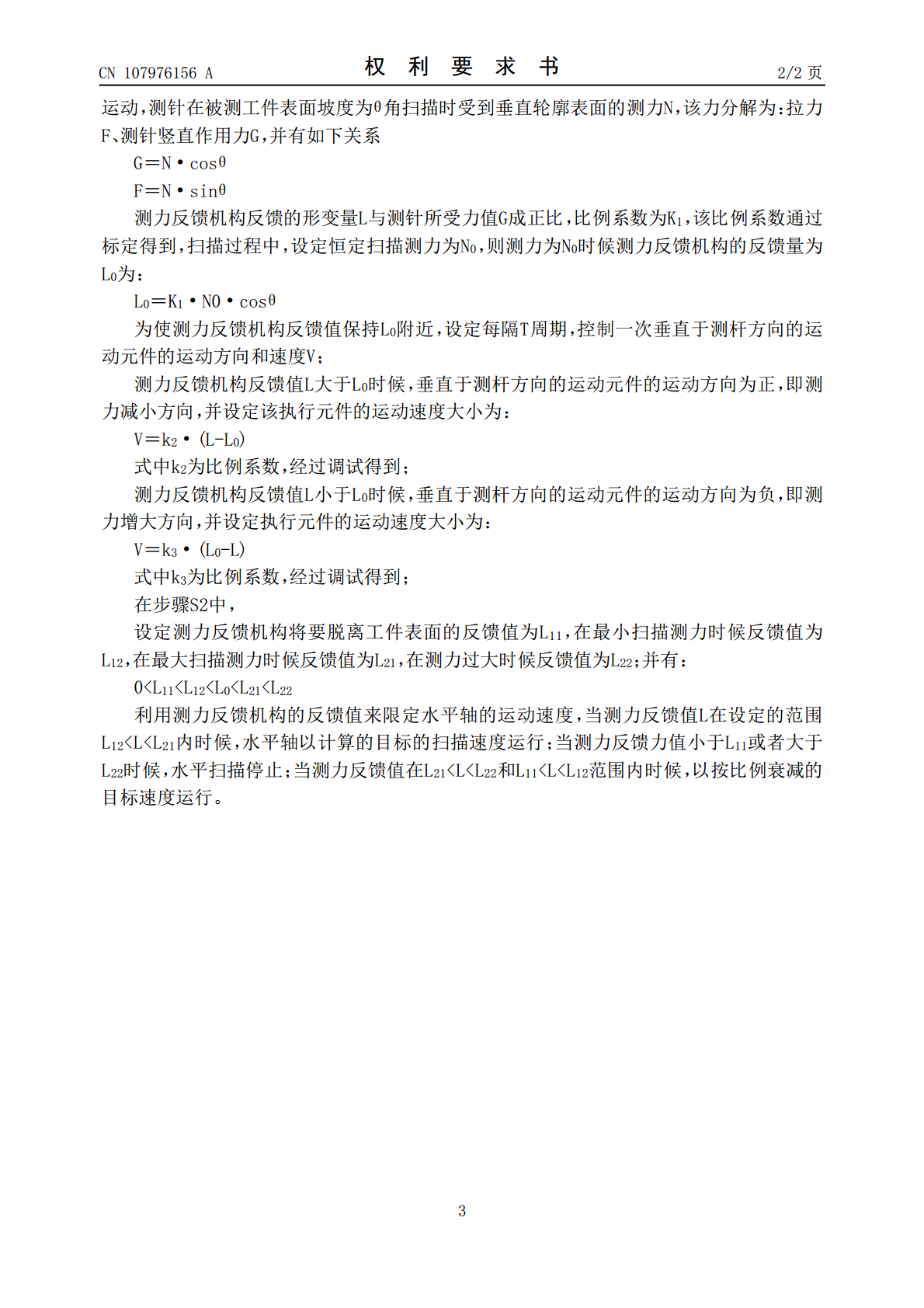
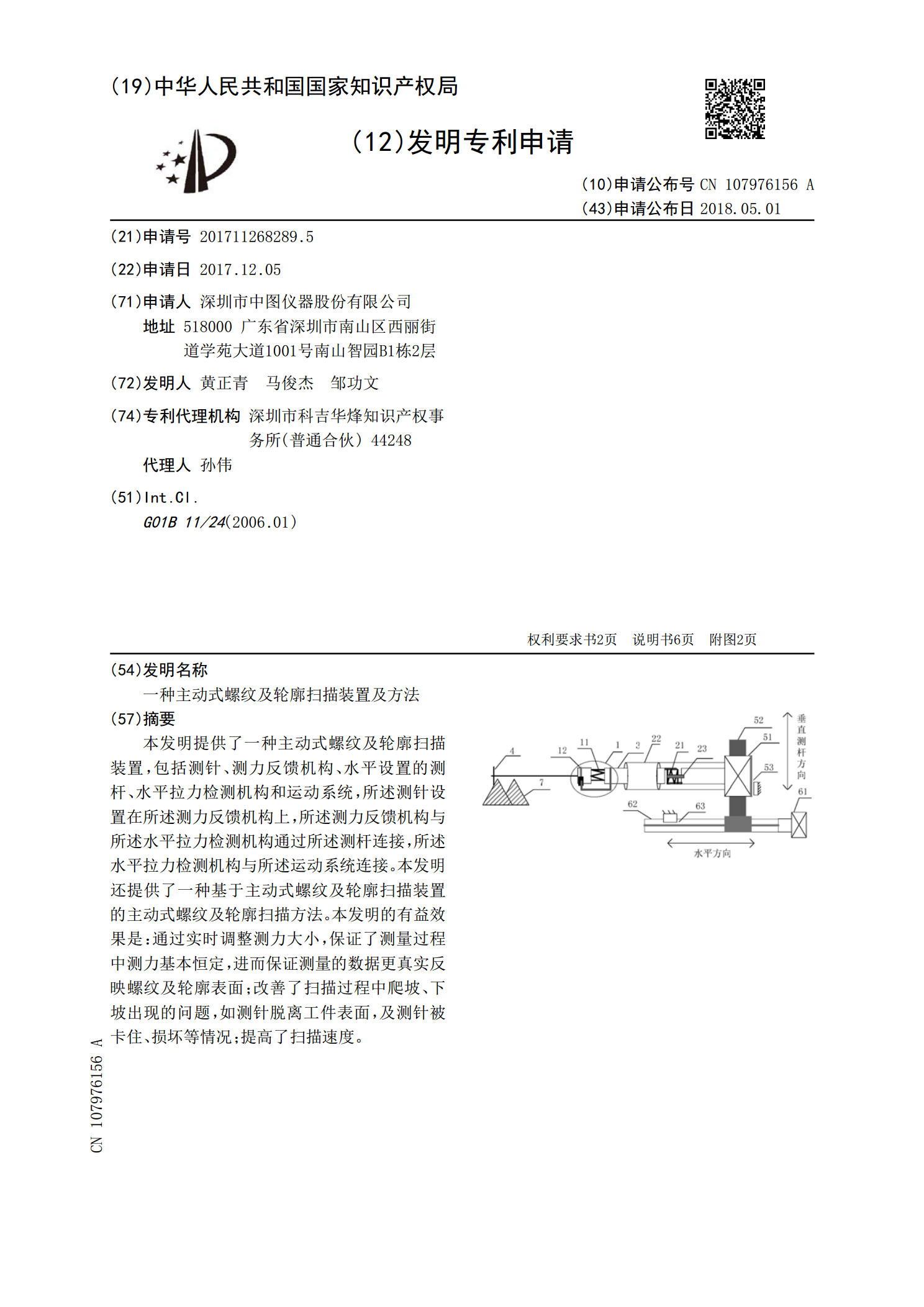
本发明提供了一种主动式螺纹及轮廓扫描装置,包括测针、测力反馈机构、水平设置的测杆、水平拉力检测机构和运动系统,所述测针设置在所述测力反馈机构上,所述测力反馈机构与所述水平拉力检测机构通过所述测杆连接,所述水平拉力检测机构与所述运动系统连接。本发明还提供了一种基于主动式螺纹及轮廓扫描装置的主动式螺纹及轮廓扫描方法。本发明的有益效果是:通过实时调整测力大小,保证了测量过程中测力基本恒定,进而保证测量的数据更真实反映螺纹及轮廓表面;改善了扫描过程中爬坡、下坡出现的问题,如测针脱离工件表面,及测针被卡住、损坏等情

螺纹轮廓扫描装置.pdf
本发明提供一种螺纹轮廓扫描装置,包括:测针;摆杆,测针固定在摆杆的一端并与摆杆的轴向垂直;转轴机构,摆杆固定在转轴机构上;压力驱动机构,压力驱动机构与摆杆的另一端联接;测力机构,测力机构与转轴机构固定在一起;拉力驱动机构;以及控制器。由于测力机构实时对测针所受的拉力进行测量,并把测量的拉力值信息传给控制器,控制器根据获取的拉力值计算出需要施加给测针的压力值,通过控制压力驱动机构实现压力值的实时调节。使得测针所受拉力和压力的合力值一直保持在预设的范围内,测针扫描大角度坡度被测件受力和扫描缓坡被测件受力一样,

基于接触式轮廓扫描的螺纹参数提取计算.pptx
汇报人:CONTENTSPARTONEPARTTWO扫描设备及原理介绍扫描数据的获取扫描数据预处理PARTTHREE螺纹轮廓特征提取参数化描述参数计算方法PARTFOUR实验设备及环境实验过程及方法实验结果展示结果分析PARTFIVE误差来源分析精度提高方法误差传递与控制PARTSIX在工业检测领域的应用在逆向工程领域的应用技术发展趋势及展望汇报人:

一种外形轮廓扫描测量装置及方法.pdf
本发明提供了一种外形轮廓扫描测量装置及方法,外形轮廓扫描测量装置包括:试验炉,其包括炉壳,所述炉壳上设有扫描窗口;扫描测量机构,其位于所述试验炉的外部,并用于在所述扫描窗口处对所述炉壳内的待测样件的外形轮廓尺寸进行扫描测量;第一升降机构,其与所述扫描测量机构可拆卸连接,并用于驱动所述扫描测量机构进行升降运动;和旋转机构,其与所述炉壳和所述第一升降机构可拆卸连接,并用于驱动所述炉壳和所述第一升降机构转动。本发明的外形轮廓扫描测量装置能够实现动态扫描,从而可以实时记录待测样件随时间、压力、温度等附加环境下的实
非接触式表面轮廓扫描装置.pdf
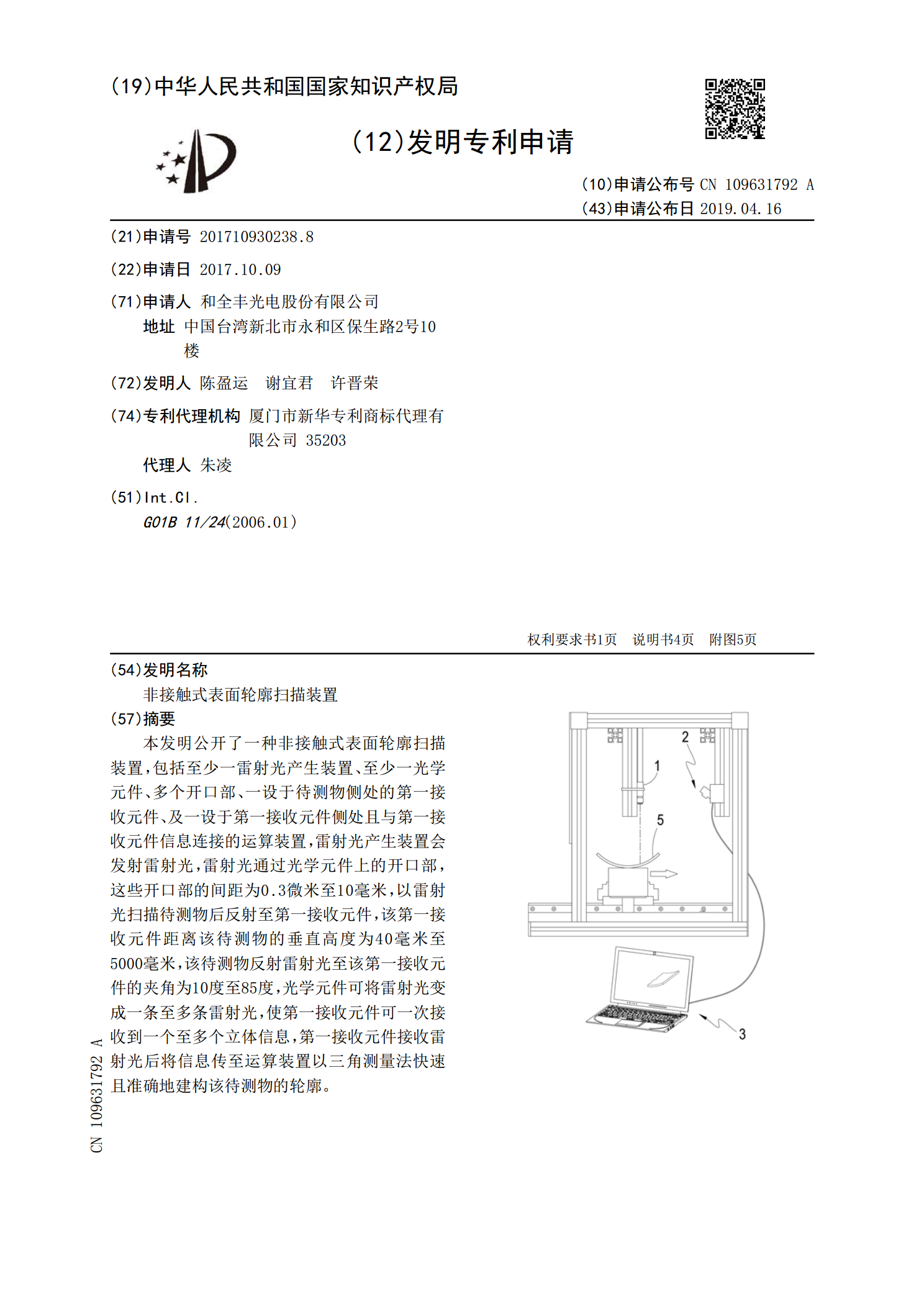
本发明公开了一种非接触式表面轮廓扫描装置,包括至少一雷射光产生装置、至少一光学元件、多个开口部、一设于待测物侧处的第一接收元件、及一设于第一接收元件侧处且与第一接收元件信息连接的运算装置,雷射光产生装置会发射雷射光,雷射光通过光学元件上的开口部,这些开口部的间距为0.3微米至10毫米,以雷射光扫描待测物后反射至第一接收元件,该第一接收元件距离该待测物的垂直高度为40毫米至5000毫米,该待测物反射雷射光至该第一接收元件的夹角为10度至85度,光学元件可将雷射光变成一条至多条雷射光,使第一接收元件可一次接收