
一种适用于各种地埋式管道的管道取物机器人.pdf

霞英****娘子

1/7
2/7

3/7

4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种适用于各种地埋式管道的管道取物机器人.pdf
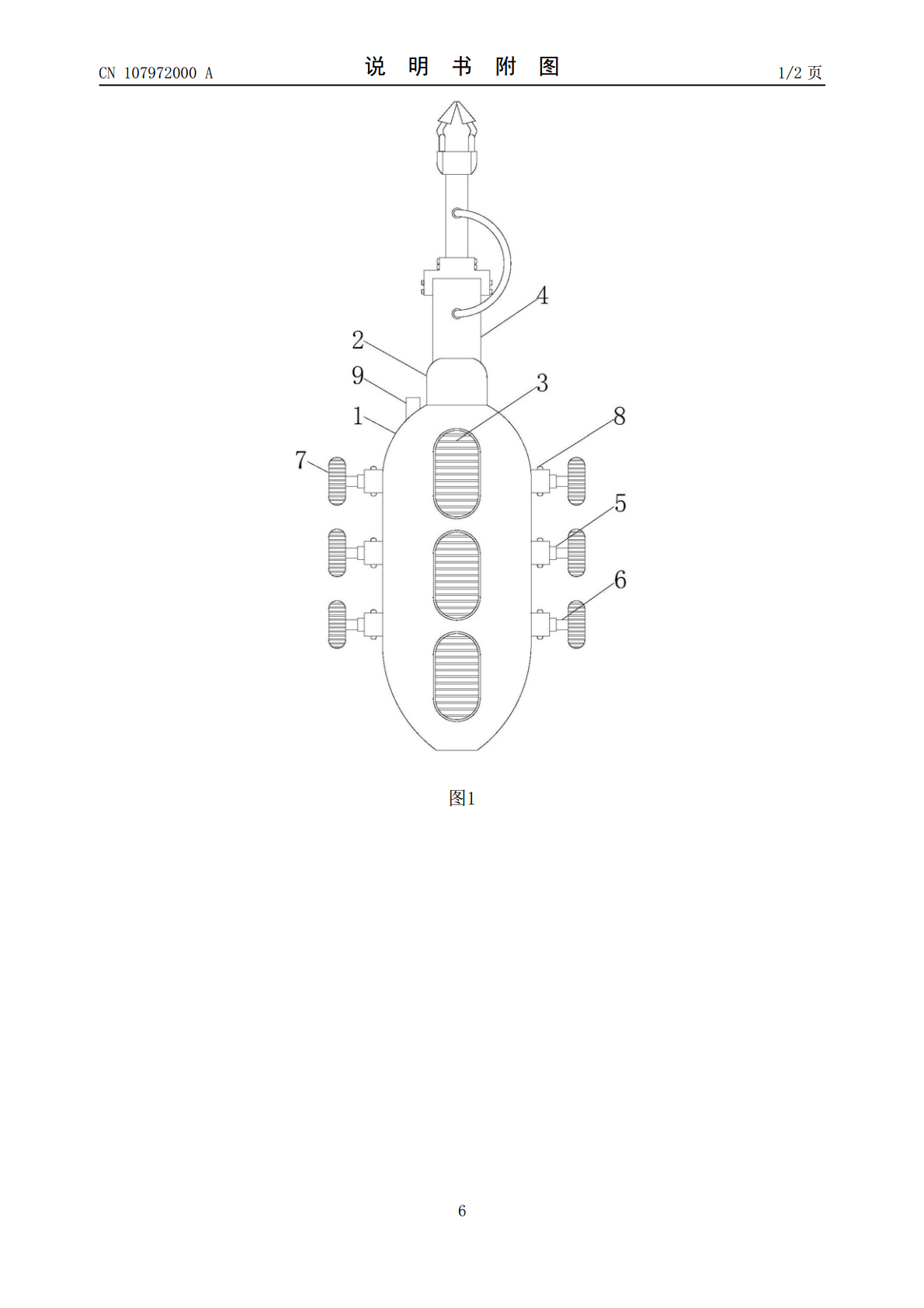
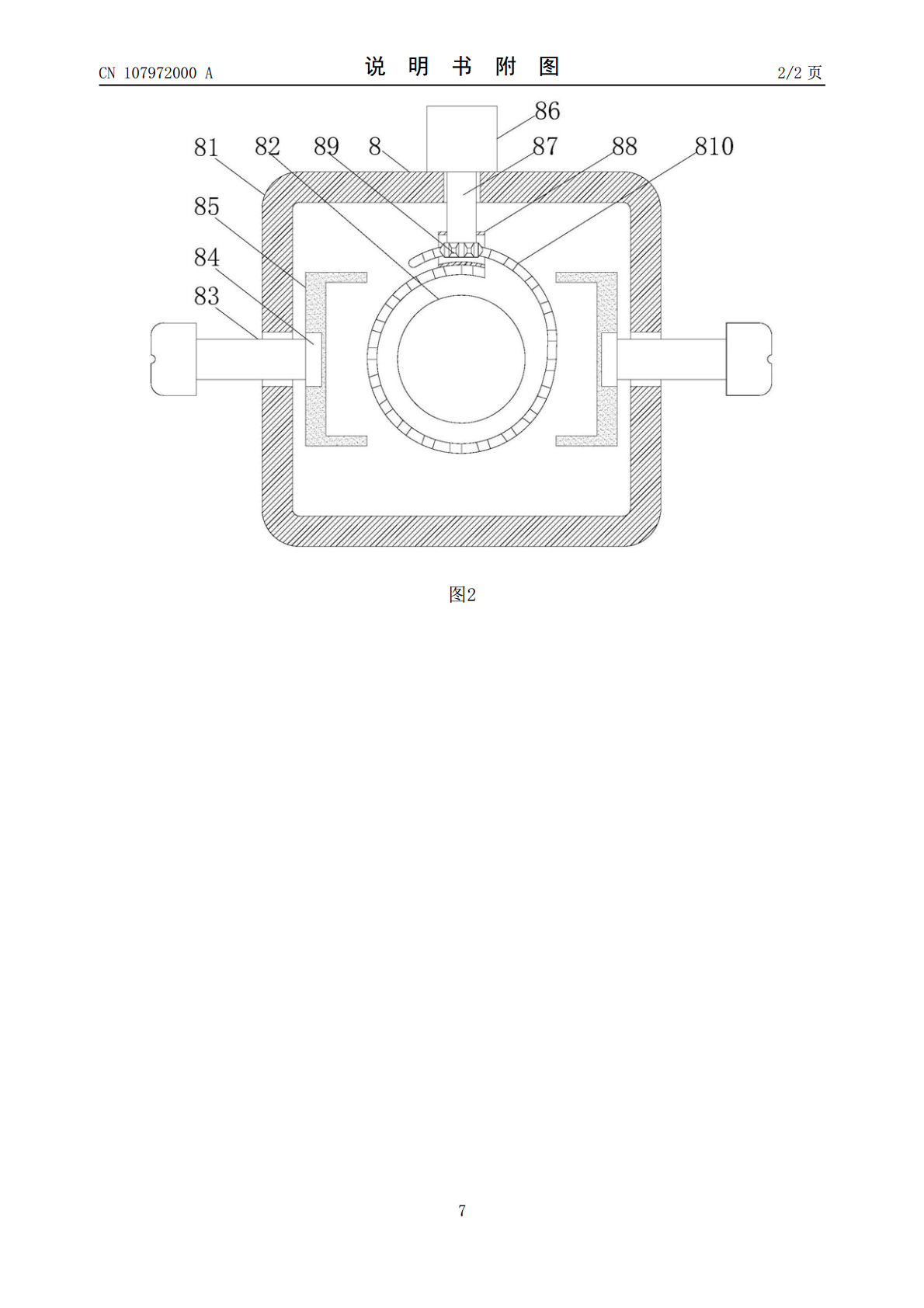
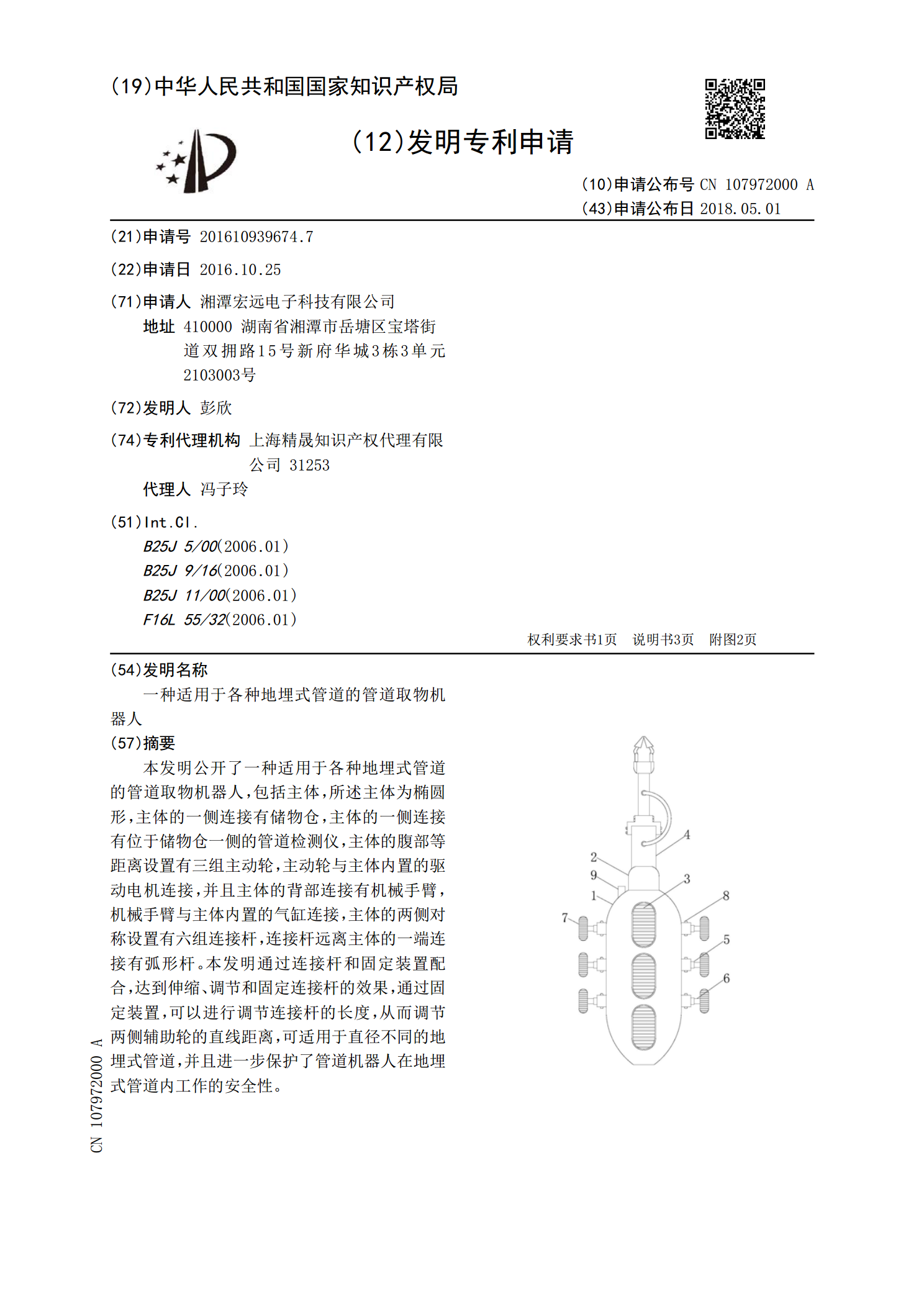
本发明公开了一种适用于各种地埋式管道的管道取物机器人,包括主体,所述主体为椭圆形,主体的一侧连接有储物仓,主体的一侧连接有位于储物仓一侧的管道检测仪,主体的腹部等距离设置有三组主动轮,主动轮与主体内置的驱动电机连接,并且主体的背部连接有机械手臂,机械手臂与主体内置的气缸连接,主体的两侧对称设置有六组连接杆,连接杆远离主体的一端连接有弧形杆。本发明通过连接杆和固定装置配合,达到伸缩、调节和固定连接杆的效果,通过固定装置,可以进行调节连接杆的长度,从而调节两侧辅助轮的直线距离,可适用于直径不同的地埋式管道,并
一种地埋式污水处理管道.pdf
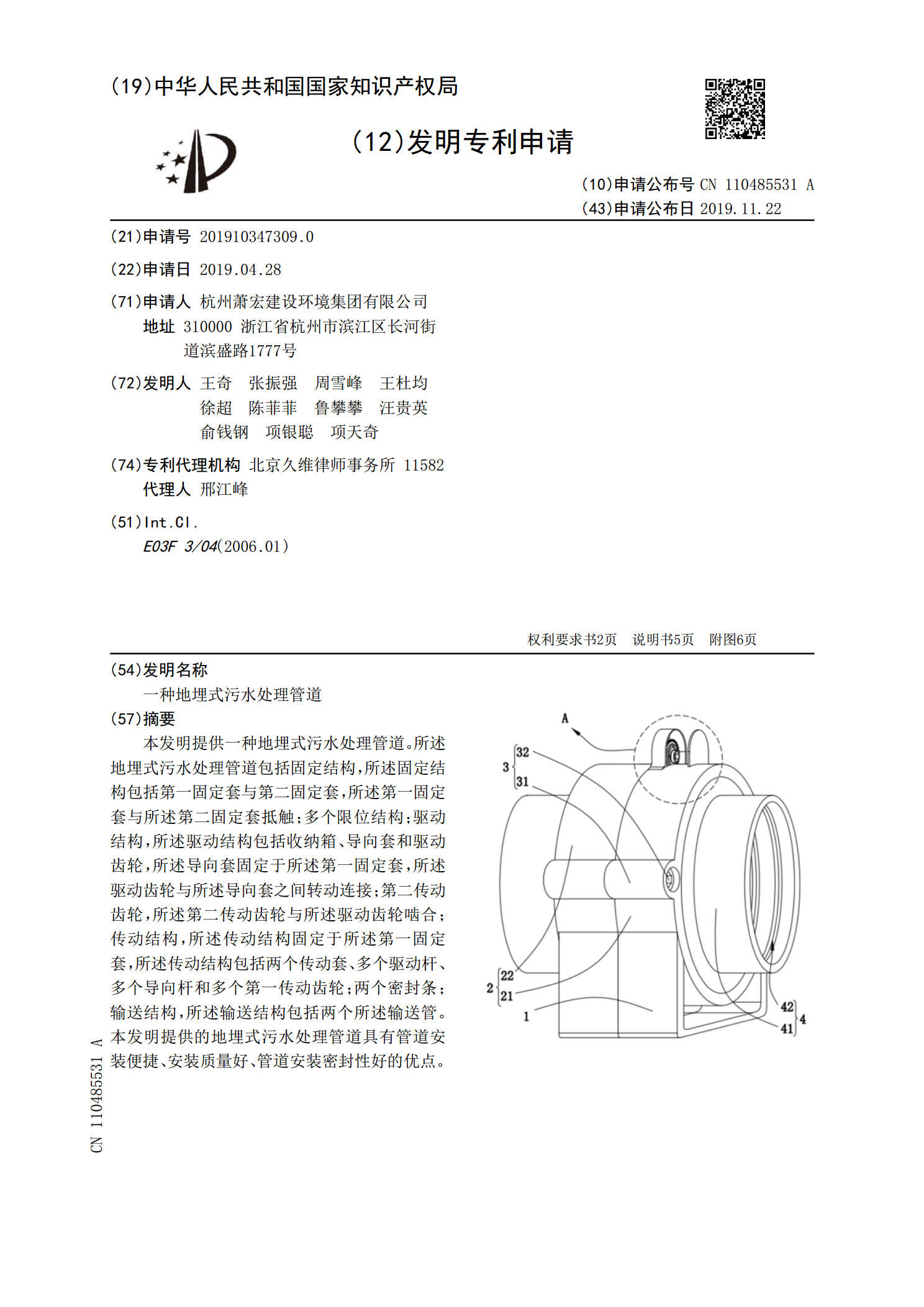
本发明提供一种地埋式污水处理管道。所述地埋式污水处理管道包括固定结构,所述固定结构包括第一固定套与第二固定套,所述第一固定套与所述第二固定套抵触;多个限位结构;驱动结构,所述驱动结构包括收纳箱、导向套和驱动齿轮,所述导向套固定于所述第一固定套,所述驱动齿轮与所述导向套之间转动连接;第二传动齿轮,所述第二传动齿轮与所述驱动齿轮啮合;传动结构,所述传动结构固定于所述第一固定套,所述传动结构包括两个传动套、多个驱动杆、多个导向杆和多个第一传动齿轮;两个密封条;输送结构,所述输送结构包括两个所述输送管。本发明提供

一种地埋式管道固定装置.pdf
本实用新型提供一种地埋式管道固定装置,涉及管道固定技术领域,包括底板,所述底板的上端固装有支撑板,所述支撑板的上端装有托板,所述底板的下端固定连接有埋地螺栓,所述托板的上端固定连接有侧卡板,所述侧卡板的一侧设置有活动卡板,所述侧卡板和活动卡板的上端均设置有海绵垫,所述侧卡板和活动卡板的表面均开设有卡槽,此时利用卡槽,可以将海绵垫卡装在侧卡板和活动卡板上,以填充管道与侧卡板和活动卡板之间的空隙,同时拧动丝杆表面的环套,使得环套可以推着活动卡板移动,使得活动卡板可以贴合管道表面,利用活动卡板和海绵垫,可避免固

一种适用于埋地管道的模块式保护方法.pdf
本发明涉及一种适用于埋地管道的模块式保护方法,其特征在于,所述方法如下:1)定位管道,确定需要保护的源水管;2)制作底座;3)制作防护盖;4)制作密封层。该技术方案首次提出用模块式方法来防护管道,原因是模块式方法拆卸和安装都很方便,可以用吨位较小的吊机进行快捷方便的拆卸与安装,达到降本增效的目的;该技术方案使用了机械工业上的间隙配合,采用定位销与定位孔的配合方式,锁死模块式防护盖,即使其上有大型载重车辆,也不会造成防护盖跑位而导致车辆陷入,实现了安全有效的防护功能。

一种地埋电力管道移运装置.pdf
本发明公开了一种地埋电力管道移运装置,包括调节架、支撑架、推管机构、限位机构、降管机构和升管机构,所述调节架的两端连有支撑架,所述支撑架的前端设有升管机构,所述支撑架的后端设有降管机构,所述降管机构与支撑架的连接处设有限位机构,所述支撑架的上端设有用于移动电力管的推管机构。解决了人工将电力管向管沟内搬运的繁琐,同时节省了人力,提高了移运速度;该装置制造成本低,便于加工,使用便利,能够代替大型吊运装置进行电力管的移运,使用方便。