
一种青贮机自动磨刀装置.pdf

志玉****爱啊

1/9
2/9

3/9
4/9
5/9
6/9

7/9

8/9

9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种青贮机自动磨刀装置.pdf
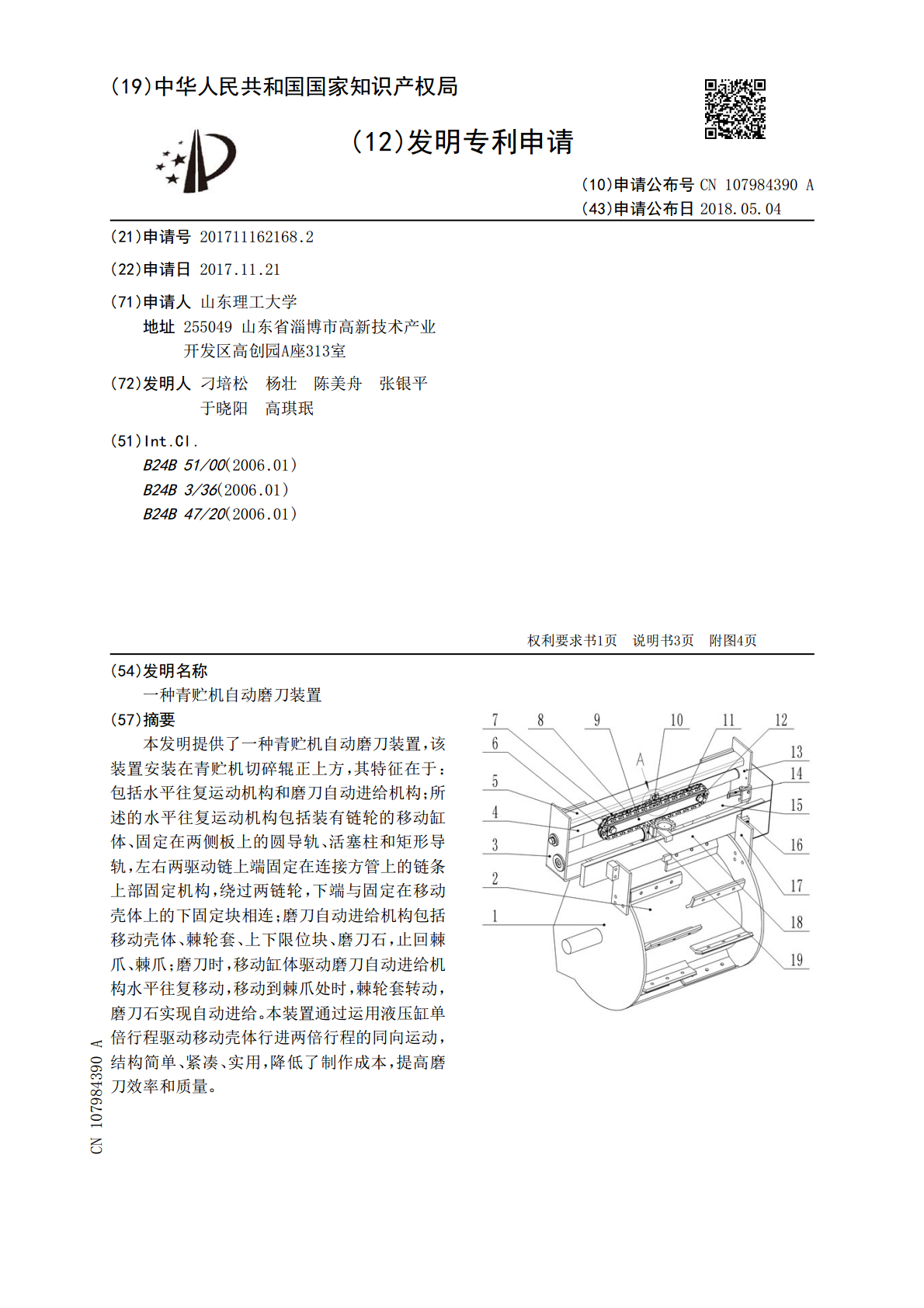
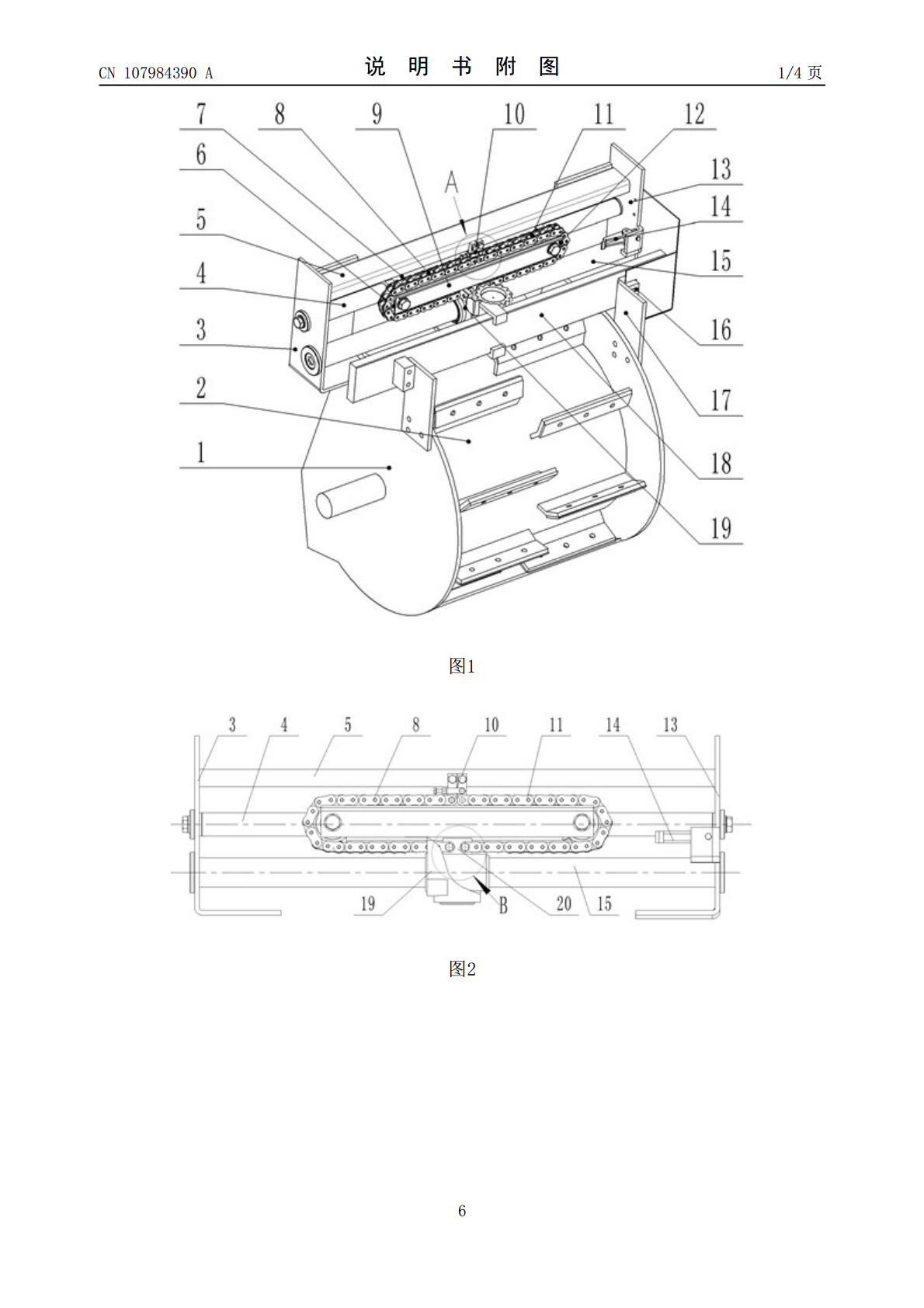
本发明提供了一种青贮机自动磨刀装置,该装置安装在青贮机切碎辊正上方,其特征在于:包括水平往复运动机构和磨刀自动进给机构;所述的水平往复运动机构包括装有链轮的移动缸体、固定在两侧板上的圆导轨、活塞柱和矩形导轨,左右两驱动链上端固定在连接方管上的链条上部固定机构,绕过两链轮,下端与固定在移动壳体上的下固定块相连;磨刀自动进给机构包括移动壳体、棘轮套、上下限位块、磨刀石,止回棘爪、棘爪;磨刀时,移动缸体驱动磨刀自动进给机构水平往复移动,移动到棘爪处时,棘轮套转动,磨刀石实现自动进给。本装置通过运用液压缸单倍行程
青贮饲料收获机自动磨刀装置.pdf
本发明提供一种青贮饲料收获机自动磨刀装置,其特征在于:包括往复运动机构和磨刀进给机构;其中往复运动机构包括导轨基座、水平安装在导轨基座上的两条导轨、安装在两条导轨上的成对滑块、将成对滑块固定连为一体的滑块板、丝杠、丝杠支座、丝杠螺母、电动机和棘爪;所述的磨刀机构包括磨刀壳体、磨刀砂轮、蜗轮、蜗杆、轴、进给套、棘轮;磨刀进给机构通过磨刀壳体与往复运动机构的滑块板相连。磨刀前调整磨刀砂轮与滚刀式切碎器动刀接触,磨刀时,磨刀砂轮在电动机的驱动下由丝杠螺母带动其做往复运动,从而将滚筒上动刀的刃口重新磨锐。该结构设
一种青贮机手动磨刀装置.pdf
本发明涉及一种青贮机手动磨刀装置,包括滚刀组合、支撑组合、定刀组合、磨刀组合和导向滑块;滚刀组合包括滚筒、铡切刀和滚切轴;支撑组合包括上墙板、下墙板、顶封板、垫板和支撑架;定刀组合包括定刀座、支架板和定刀;磨刀组合包括套管、磨石盒、磨石、轴承盒、丝杠、摇把一和摇把二;导向滑块下端连接丝杠螺母,导向滑块上端套接在磨石盒上;本发明避免了作业季后将动刀拆下来再进行磨刃,减少劳动成本;磨刃后使动刀更加锋利,改善了作业效果,提高了劳动生产率;相比于国外自动磨刀装置,成本更低、简单易操作,符合我国国情;相比于国内的自

一种自动磨刀机的卸料装置.pdf
本发明公开了一种自动磨刀机的卸料装置,包括:基础平台、第一支架和第二支架,所述基础平台上还设置有一个伸缩装置支撑架,所述伸缩装置支撑架上设置有伸缩装置,所述第一支架顶部铰接设置有一根指向第二支架的第一摇摆臂,所述第二支架顶部铰接设置有一根指向第一支架的第二摇摆臂,所述第一支架的末端设置有一个卸料杆固定块,所述卸料杆固定块上设置有两根斜向上延伸的卸料杆。通过上述方式,本发明所述的自动磨刀机的卸料装置,利用伸缩装置实现了卸料杆的上挑动作,手术刀片沿着卸料杆而滑落到卸料杆底部进行叠加,提高了工作效率,有利于自动

一种用于自动铺布机的手动磨刀装置.pdf
本发明公开了一种用于自动铺布机的手动磨刀装置,包括磨刀壳架、连接块、方形套筒、砂轮外弹簧、砂轮内弹簧、开口挡圈、六角铜套、连接柱、砂轮,所述的磨刀壳架与所述的连接块固定连接,所述的砂轮和所述的连接柱固定连接,所述的砂轮外弹簧外置于所述的方形套筒上,所述的砂轮内弹簧外置于所述的连接柱上,所述的连接柱贯穿所述的六角铜套,所述的开口档圈置于所述的连接柱一端的凹槽处,所述的六角铜套贯穿所述的连接块,与所述的方形套筒螺纹连接。本发明具有结构简单、双弹簧设置弹起自如、磨刀运动灵活等优点。