
一种环保型机器人.pdf

佳宁****么啦


1/7

2/7

3/7

4/7

5/7

6/7

7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种环保型机器人.pdf
本发明公开了一种环保型机器人,包括收集仓,收集仓的外形为圆形中空结构,收集仓的顶部固定连接有固定底座,固定底座的顶部固定连接有传动舱,传动舱的两侧均贯穿有驱动杆,驱动杆位于传动舱外部的一端通过传动轴传动连接有滚轮装置,滚轮装置的两侧通过均通过固定板与收集仓转动连接,涉及环保用具技术领域。该环保型机器人,通过滚轮装置可以实现自主收集水面的漂浮物,通过放置多个该环保型机器人可以实现大面积的漂浮物自主清理收集,方便统一处理,机器人自身拥有漂浮能力,并且正反都可以实现清理功能,可以在湖泊或者河流中进行清理操作,适
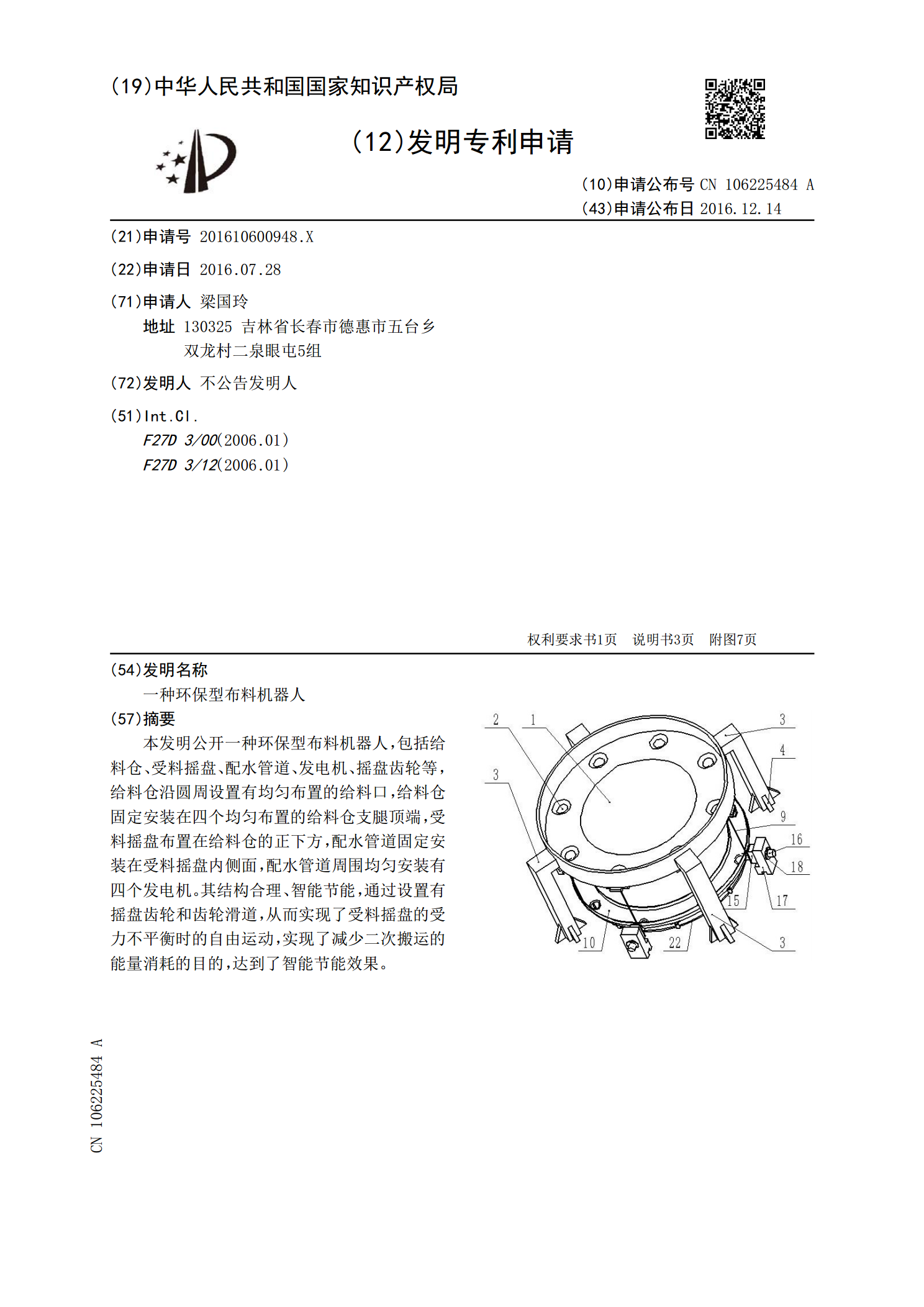
一种环保型布料机器人.pdf
本发明公开一种环保型布料机器人,包括给料仓、受料摇盘、配水管道、发电机、摇盘齿轮等,给料仓沿圆周设置有均匀布置的给料口,给料仓固定安装在四个均匀布置的给料仓支腿顶端,受料摇盘布置在给料仓的正下方,配水管道固定安装在受料摇盘内侧面,配水管道周围均匀安装有四个发电机。其结构合理、智能节能,通过设置有摇盘齿轮和齿轮滑道,从而实现了受料摇盘的受力不平衡时的自由运动,实现了减少二次搬运的能量消耗的目的,达到了智能节能效果。

一种节能环保型码垛机器人.pdf
本发明涉及码垛机械领域,具体的说是一种节能环保型码垛机器人,包括基板、底座、支架、支撑柱、液压臂、活动臂、滑轮、平衡块和制动控制装置。支架固定在底座上;支撑柱竖直固定在旋转座上;液压臂两端分别与支撑柱和活动臂铰接;滑轮包括设置在支架上的主动卷轮和定滑轮;牵引线一端固定在活动臂另一端上,牵引线中部从定滑轮上绕过,且牵引线的另一端在主动卷轮上缠绕若干圈;平衡块与牵引线的另一端连接并悬空设置;制动控制装置设置在活动臂上。本发明通过绳索和滑轮进行力的传递,使绳索两端所受力的差距变小,因此机械臂运动时,驱动电机的输
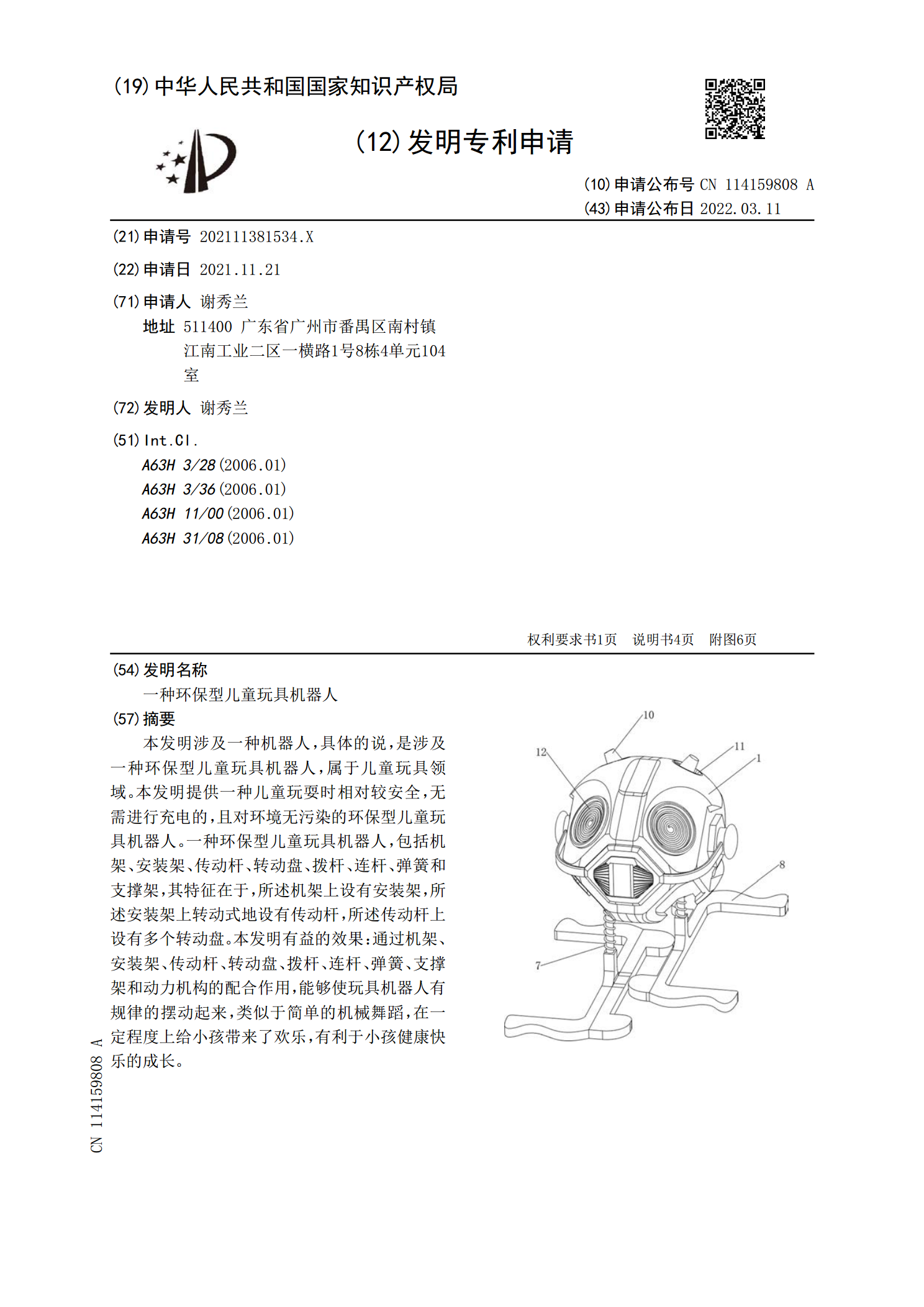
一种环保型儿童玩具机器人.pdf
本发明涉及一种机器人,具体的说,是涉及一种环保型儿童玩具机器人,属于儿童玩具领域。本发明提供一种儿童玩耍时相对较安全,无需进行充电的,且对环境无污染的环保型儿童玩具机器人。一种环保型儿童玩具机器人,包括机架、安装架、传动杆、转动盘、拨杆、连杆、弹簧和支撑架,其特征在于,所述机架上设有安装架,所述安装架上转动式地设有传动杆,所述传动杆上设有多个转动盘。本发明有益的效果:通过机架、安装架、传动杆、转动盘、拨杆、连杆、弹簧、支撑架和动力机构的配合作用,能够使玩具机器人有规律的摆动起来,类似于简单的机械舞蹈,在一

一种绿色环保型钢铁搬运机器人.pdf
本发明涉及起重搬运工具设备技术领域,具体的说是一种绿色环保型钢铁搬运机器人,包括主梁,所述主梁上连接有桥架结构,所述主梁上设有移动结构,所述移动结构上连接有吊装结构,所述吊装结构上连接有伸缩臂结构,所述桥架结构和移动结构上均连接有滚动结构;通过桥架结构和滚动结构能够使钢铁搬运机器人沿X轴方向往复运动,通过移动结构和滚动结构能够使钢铁搬运机器人沿Y轴方向往复运动,通过吊装结构和伸缩臂结构能够避免钢铁搬运机器人运行中吊具发生摇晃现象,而且可以提升搬运机器人的抓取和放置的定位精度,准确无误的抓取并投放钢材以提升