
动力转向装置的控制装置及动力转向装置.pdf

一只****签网

1/10
2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

动力转向装置及动力转向装置的控制装置.pdf
一种动力转向装置及动力转向装置的控制装置,具有分别具有至少双系统的冗余度的转向操纵扭矩传感器(TS1、TS2)、转向操纵角传感器(AS1、AS2)、马达旋转角传感器(61、62),通常情况下,在所述分别为双系统的转向操纵扭矩传感器(TS1、TS2)、转向操纵角传感器(AS1、AS2)、马达旋转角传感器(61、62)中,基于一个系统的转向操纵扭矩检测信号、转向操纵角检测信号、马达旋转角检测信号来进行转向操纵辅助控制。在双系统的转向操纵扭矩传感器(TS1、TS2)、转向操纵角传感器(AS1、AS2)、马达旋转
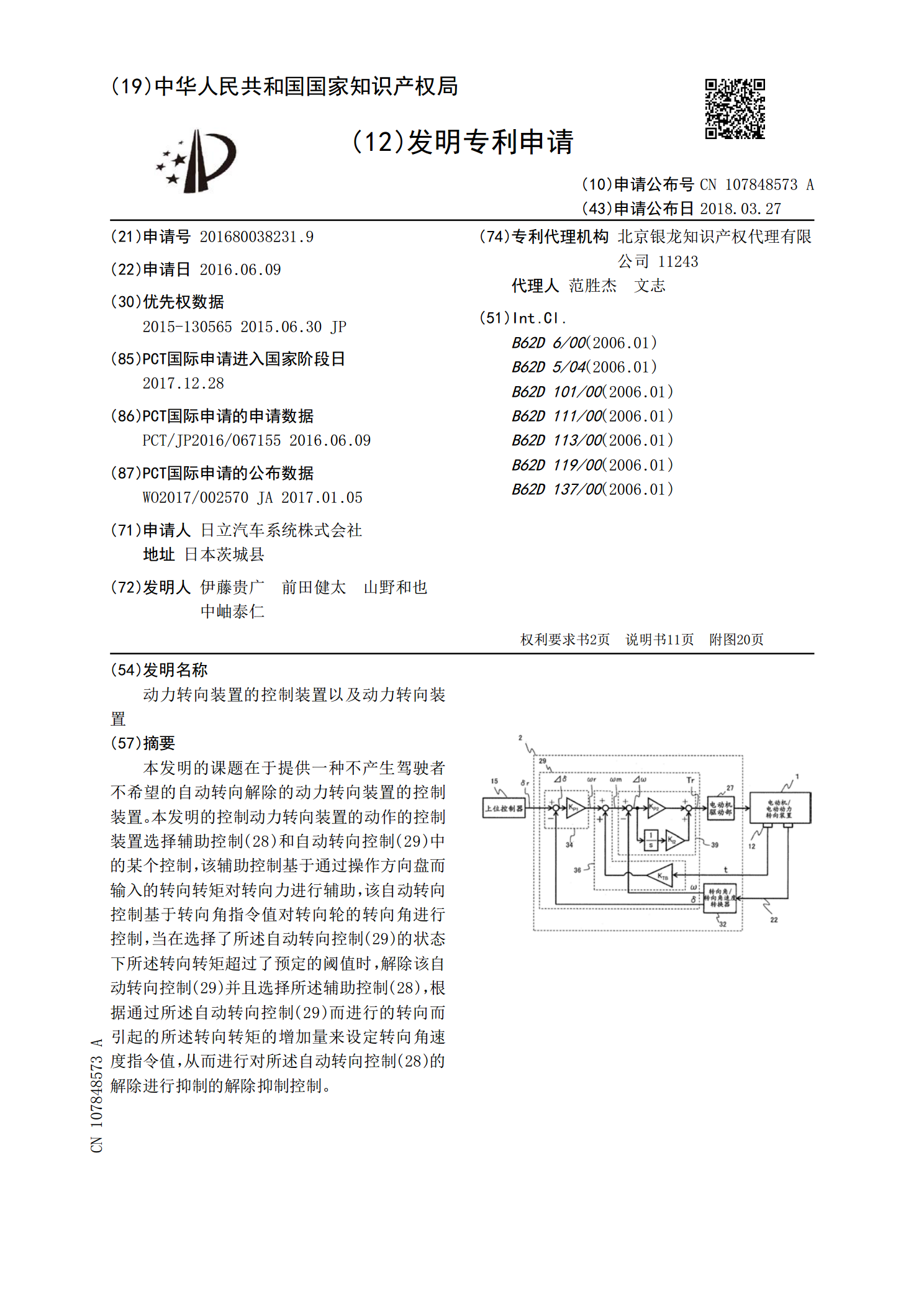
动力转向装置的控制装置以及动力转向装置.pdf
本发明的课题在于提供一种不产生驾驶者不希望的自动转向解除的动力转向装置的控制装置。本发明的控制动力转向装置的动作的控制装置选择辅助控制(28)和自动转向控制(29)中的某个控制,该辅助控制基于通过操作方向盘而输入的转向转矩对转向力进行辅助,该自动转向控制基于转向角指令值对转向轮的转向角进行控制,当在选择了所述自动转向控制(29)的状态下所述转向转矩超过了预定的阈值时,解除该自动转向控制(29)并且选择所述辅助控制(28),根据通过所述自动转向控制(29)而进行的转向而引起的所述转向转矩的增加量来设定转向角
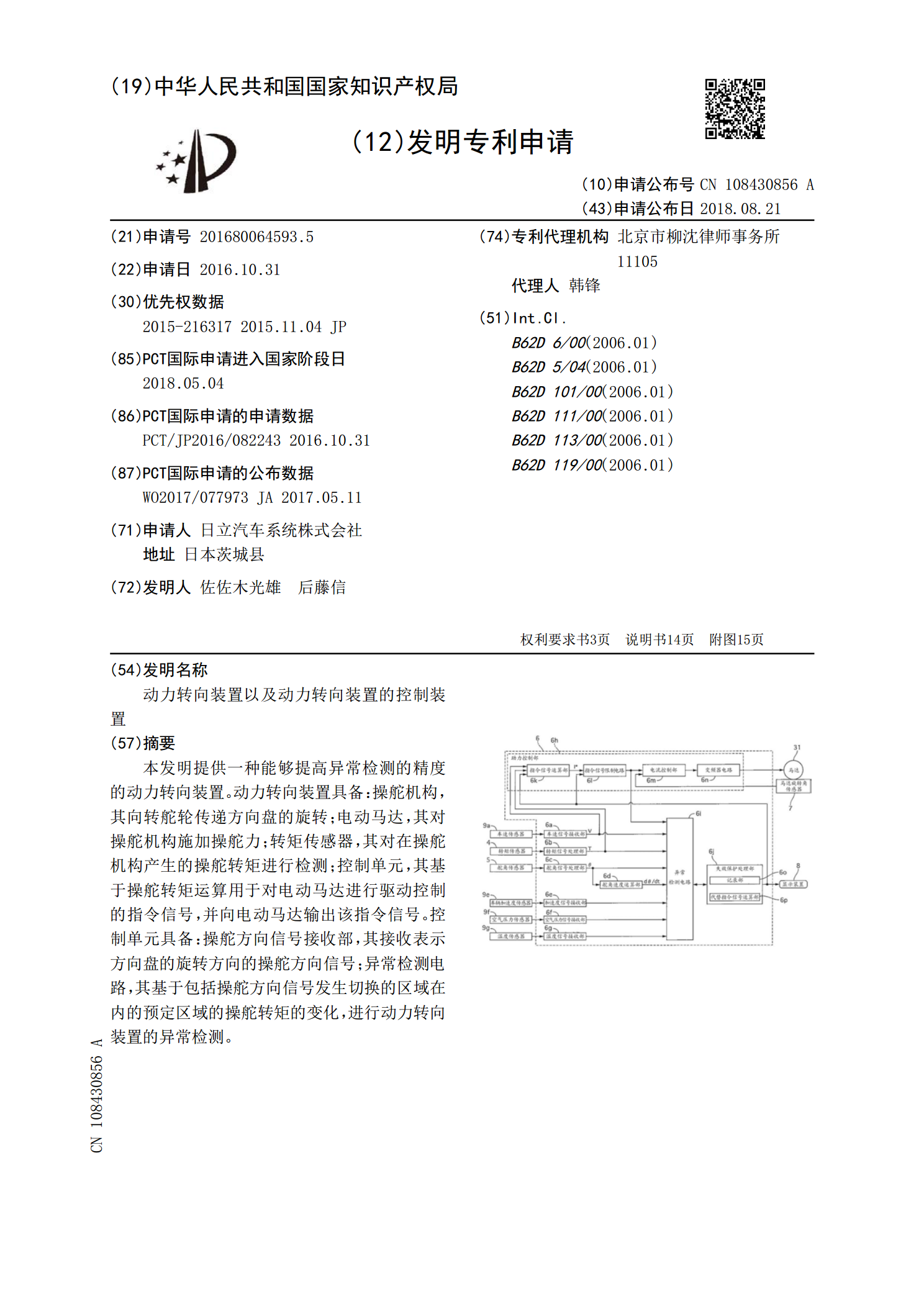
动力转向装置以及动力转向装置的控制装置.pdf
本发明提供一种能够提高异常检测的精度的动力转向装置。动力转向装置具备:操舵机构,其向转舵轮传递方向盘的旋转;电动马达,其对操舵机构施加操舵力;转矩传感器,其对在操舵机构产生的操舵转矩进行检测;控制单元,其基于操舵转矩运算用于对电动马达进行驱动控制的指令信号,并向电动马达输出该指令信号。控制单元具备:操舵方向信号接收部,其接收表示方向盘的旋转方向的操舵方向信号;异常检测电路,其基于包括操舵方向信号发生切换的区域在内的预定区域的操舵转矩的变化,进行动力转向装置的异常检测。
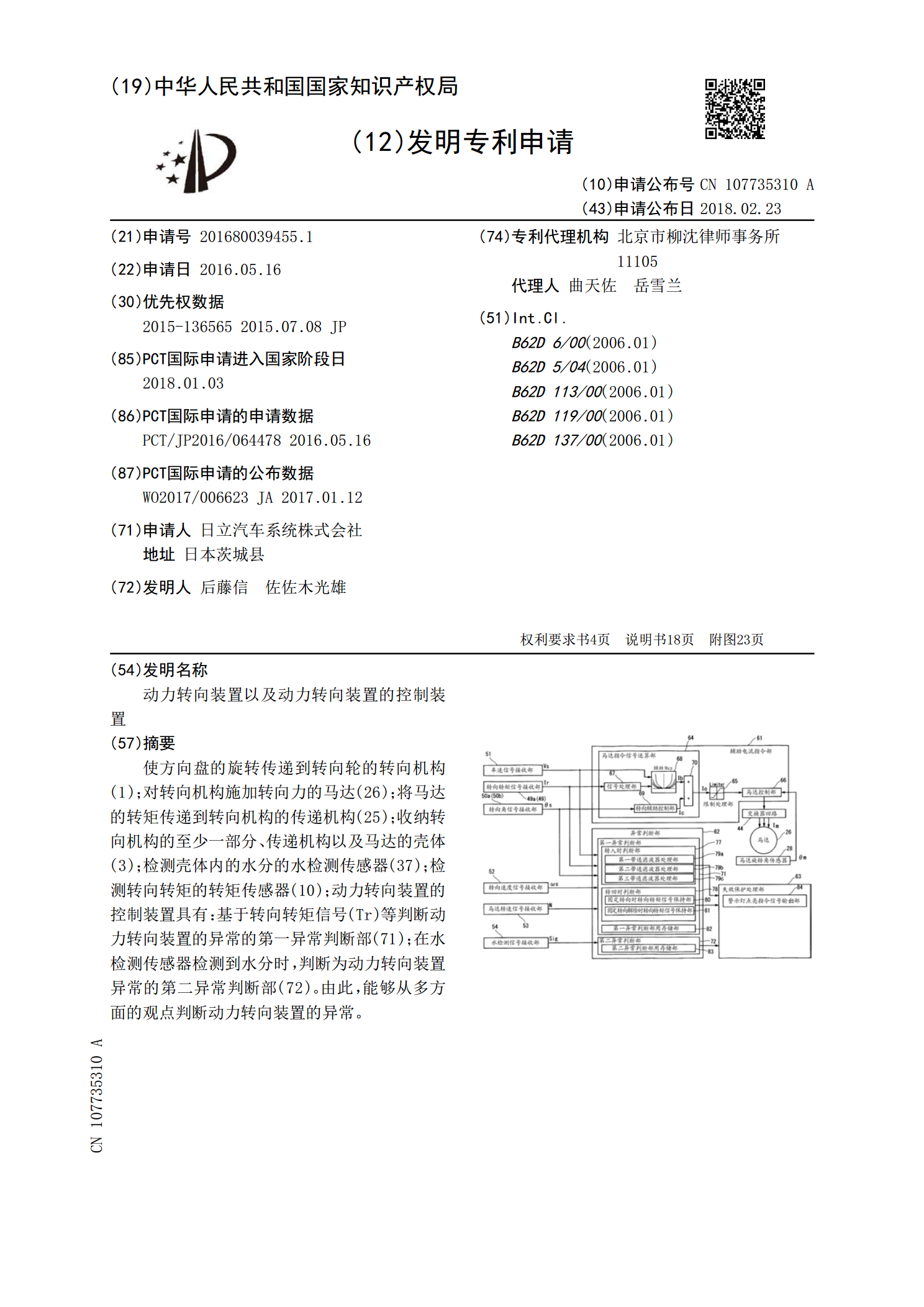
动力转向装置以及动力转向装置的控制装置.pdf
使方向盘的旋转传递到转向轮的转向机构(1);对转向机构施加转向力的马达(26);将马达的转矩传递到转向机构的传递机构(25);收纳转向机构的至少一部分、传递机构以及马达的壳体(3);检测壳体内的水分的水检测传感器(37);检测转向转矩的转矩传感器(10);动力转向装置的控制装置具有:基于转向转矩信号(Tr)等判断动力转向装置的异常的第一异常判断部(71);在水检测传感器检测到水分时,判断为动力转向装置异常的第二异常判断部(72)。由此,能够从多方面的观点判断动力转向装置的异常。
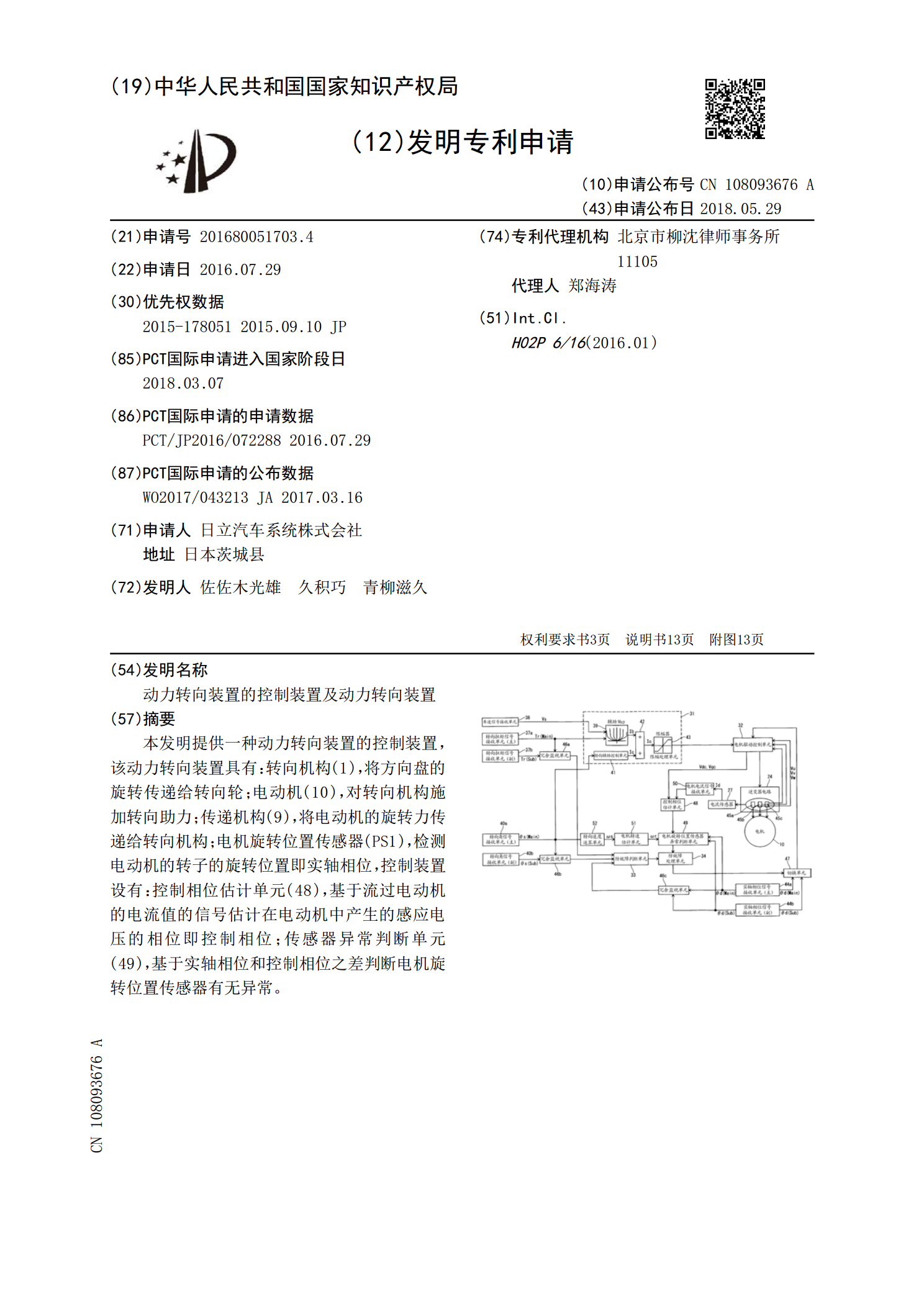
动力转向装置的控制装置及动力转向装置.pdf
本发明提供一种动力转向装置的控制装置,该动力转向装置具有:转向机构(1),将方向盘的旋转传递给转向轮;电动机(10),对转向机构施加转向助力;传递机构(9),将电动机的旋转力传递给转向机构;电机旋转位置传感器(PS1),检测电动机的转子的旋转位置即实轴相位,控制装置设有:控制相位估计单元(48),基于流过电动机的电流值的信号估计在电动机中产生的感应电压的相位即控制相位;传感器异常判断单元(49),基于实轴相位和控制相位之差判断电机旋转位置传感器有无异常。