
一种基于图像处理的集装箱锁孔轮廓提取方法.pdf

如灵****姐姐

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于图像处理的集装箱锁孔轮廓提取方法.pdf
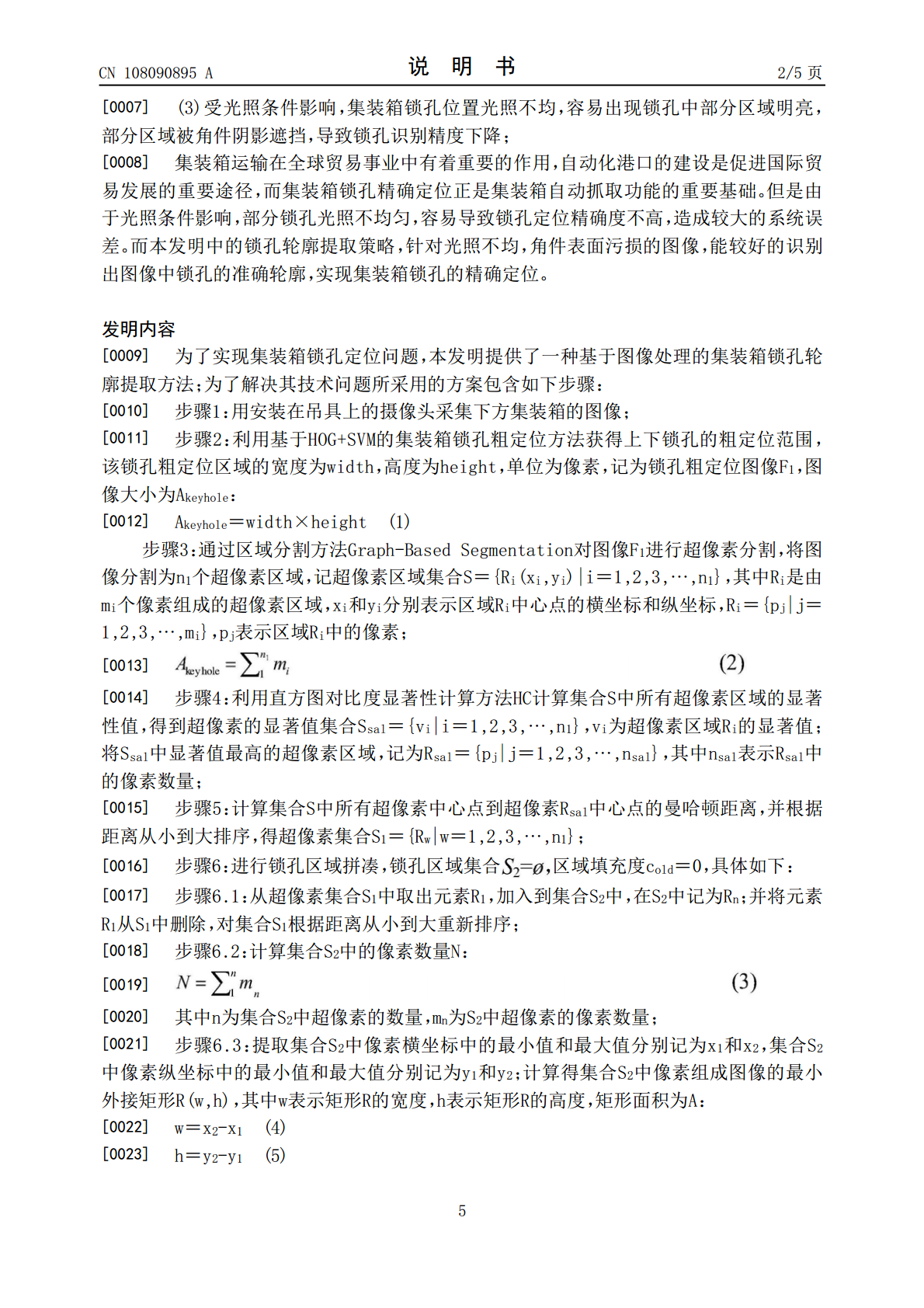
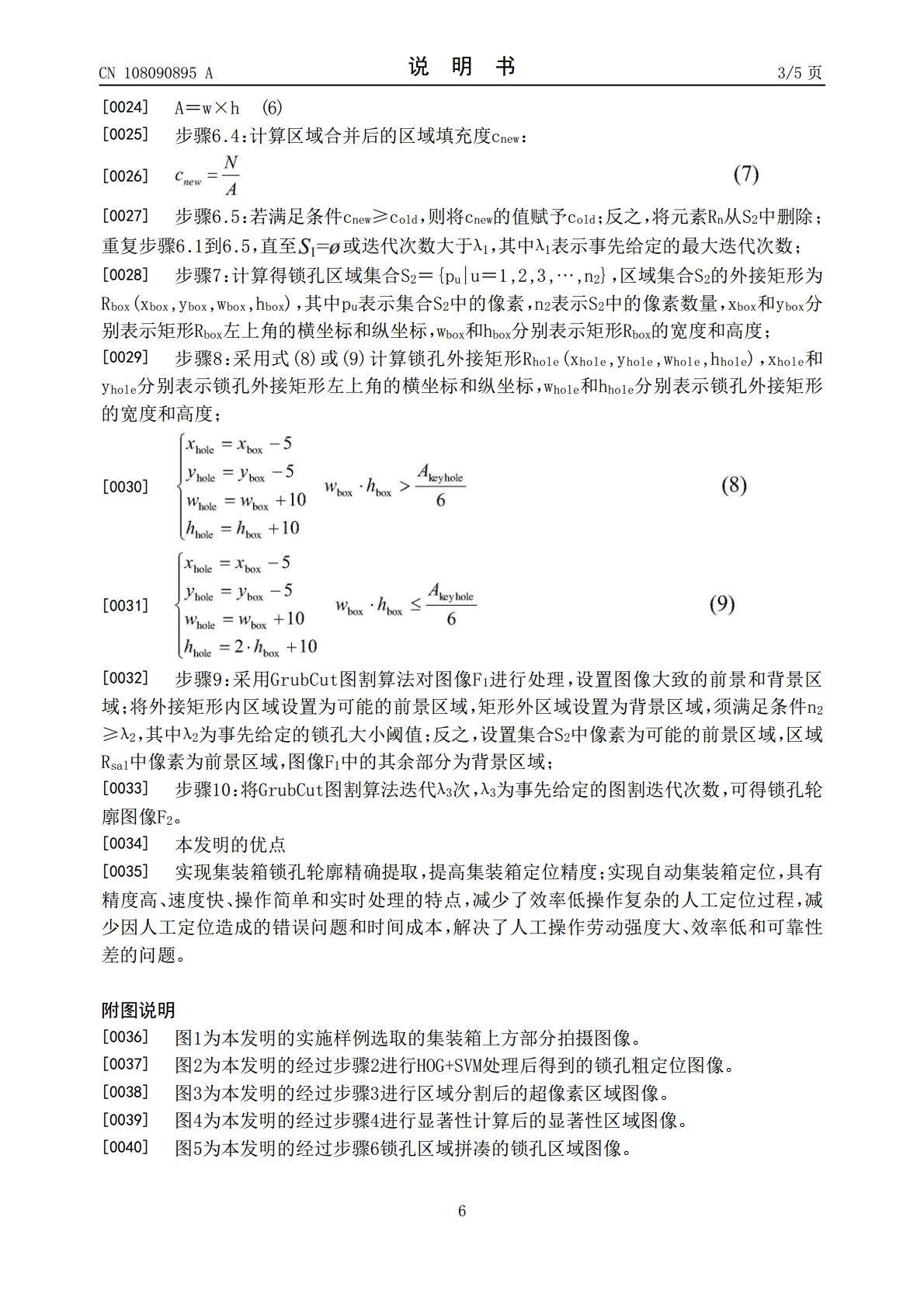
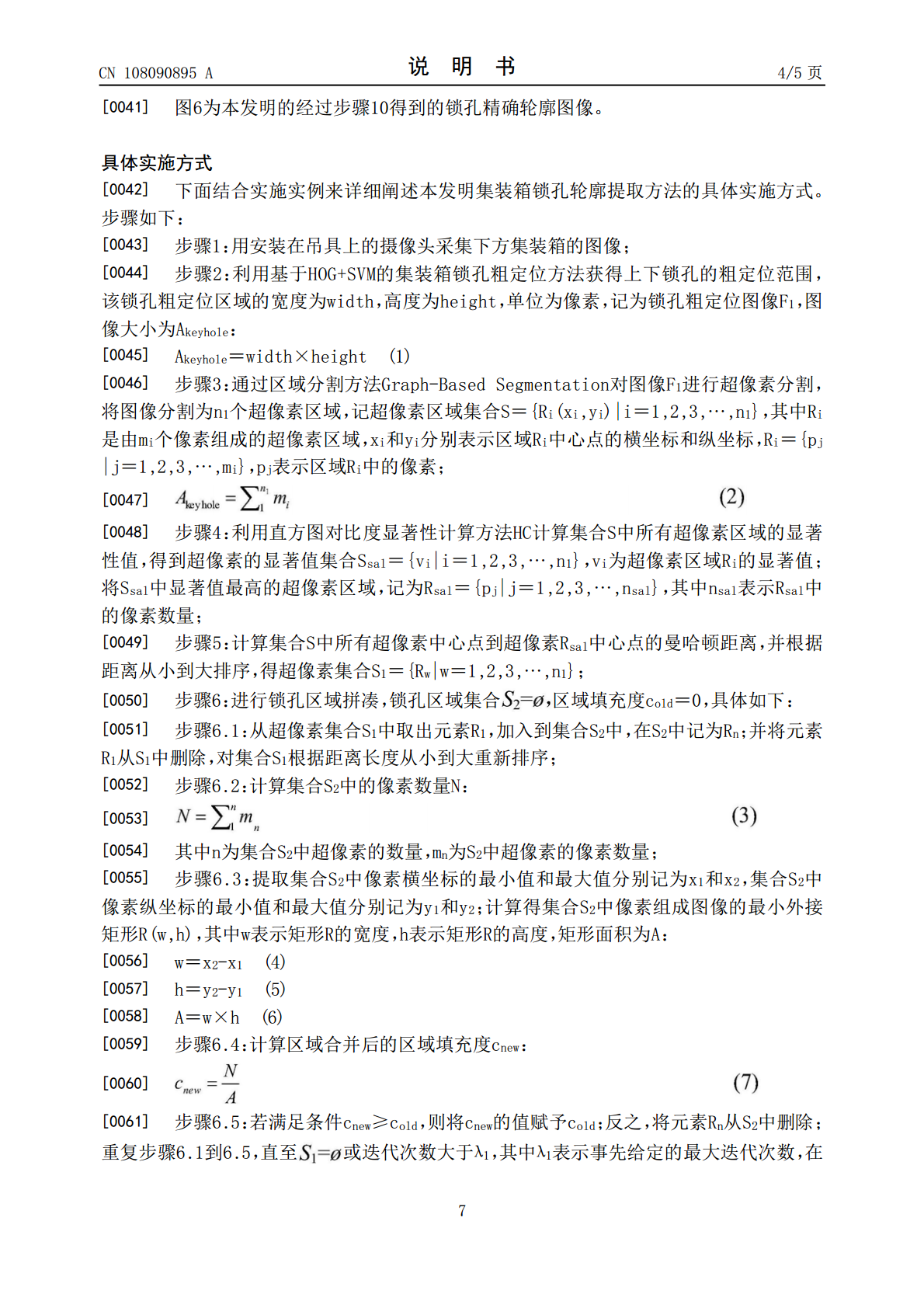
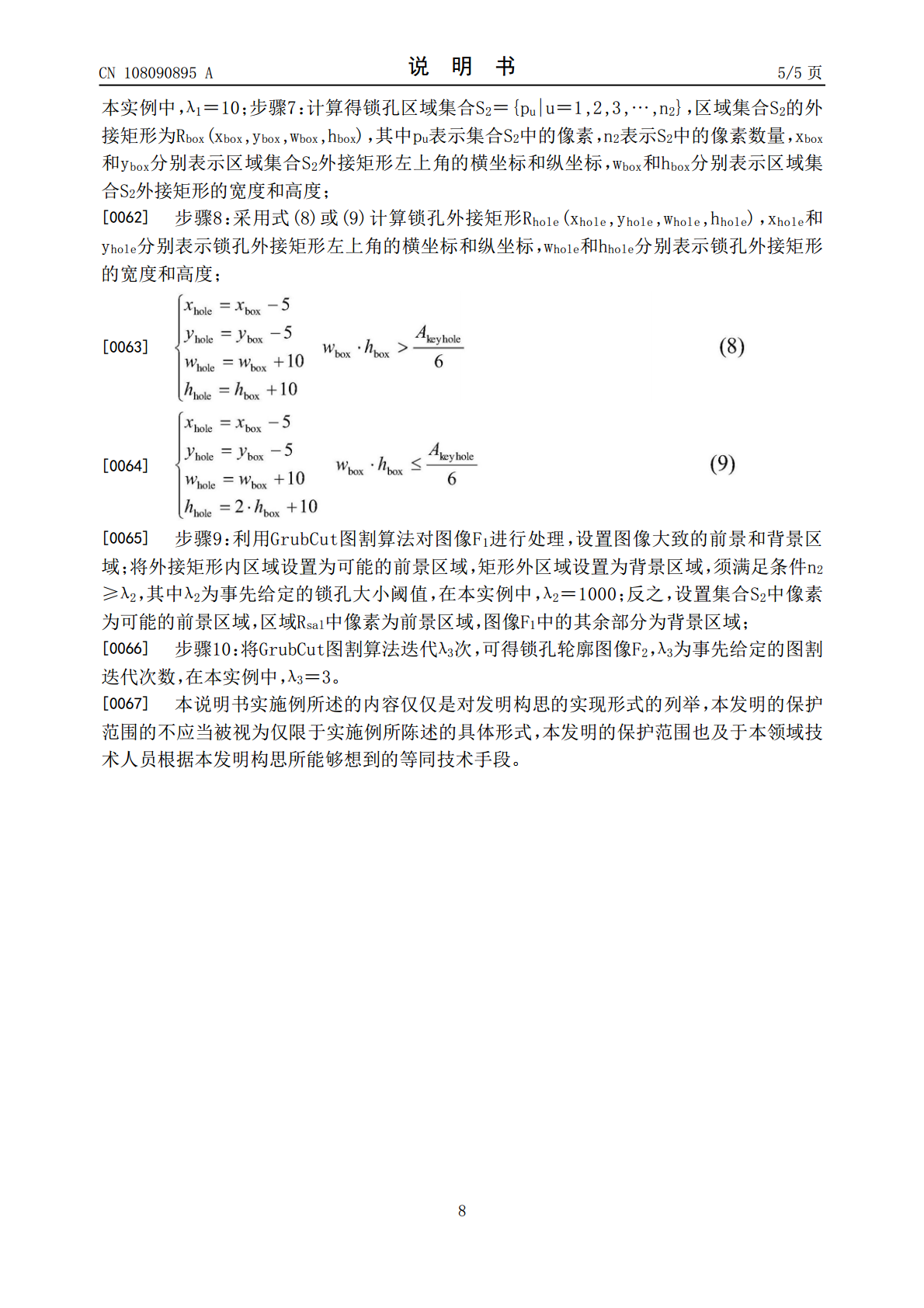
本发明公开了一种基于图像处理的集装箱锁孔轮廓提取方法,实现集装箱锁孔轮廓精确提取,提高集装箱定位精度;实现自动集装箱定位,具有精度高、速度快、操作简单和实时处理的特点,减少了效率低操作复杂的人工定位过程,减少因人工定位造成的错误问题和时间成本,解决了人工操作劳动强度大、效率低和可靠性差的问题。

一种基于图像处理的火焰轮廓提取方法.pdf
一种基于图像处理的火焰轮廓提取方法,包括以下步骤:1)将彩色的火焰RGB图像分别转化为R值、G值和B值的灰度分量图像;2)根据火焰分量图像的特征,将需要关注的火焰特征区域定义为目标对象,将对轮廓提取过程产生显著影响的区域定义为干扰对象,分别对目标对象和干扰对象进行图像采样,对采样后的图像进行灰度分布分析,利用其灰度分布直方图的主峰值定义目标对象和干扰对象的初值;3)建立目标图像方程组,给出基于两个分量灰度图像的目标矩阵关系式,得到目标图像;4)通过灰度分布直方图获得图像分割的阈值,进行目标图像的二值化,采
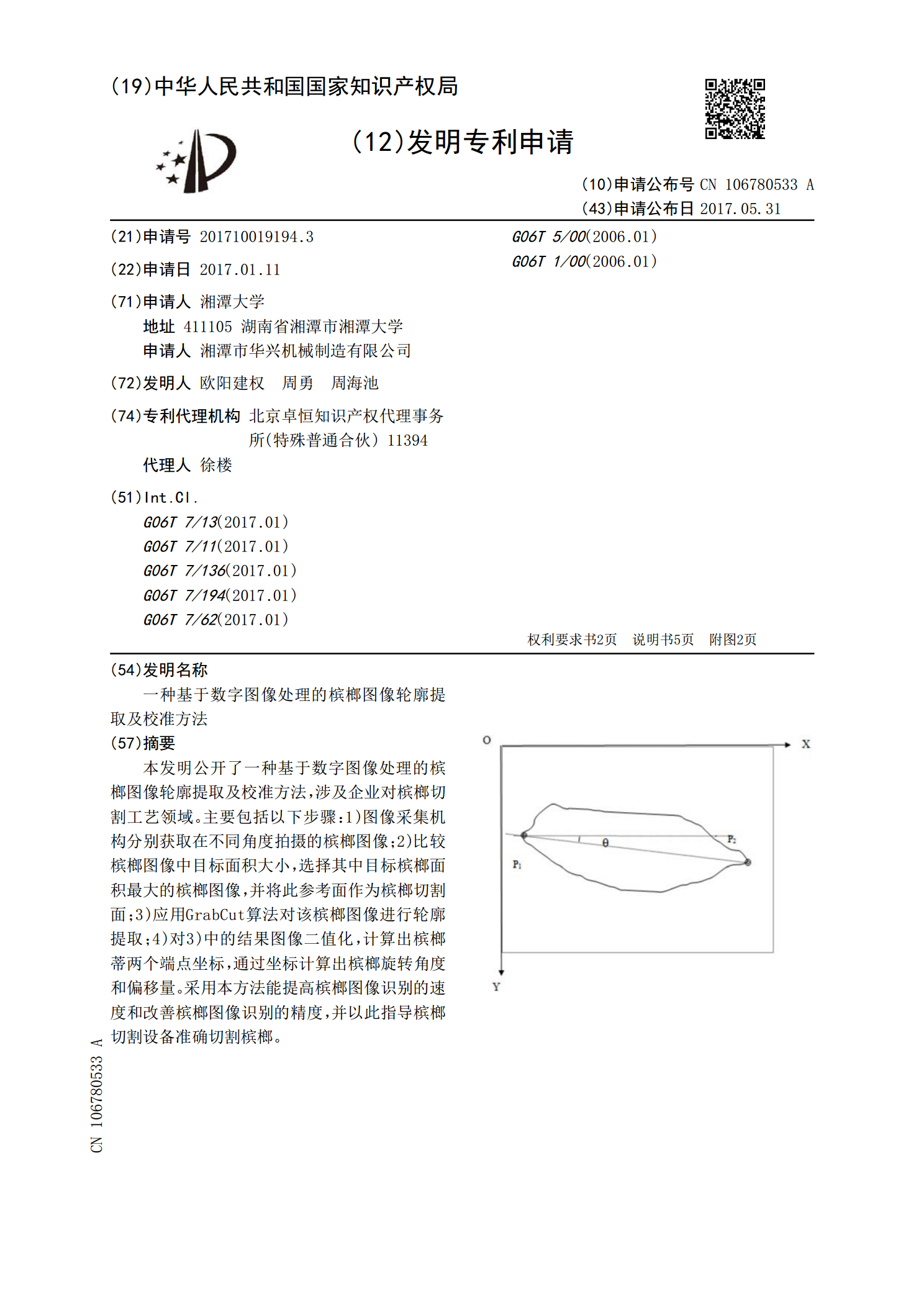
一种基于数字图像处理的槟榔图像轮廓提取及校准方法.pdf
本发明公开了一种基于数字图像处理的槟榔图像轮廓提取及校准方法,涉及企业对槟榔切割工艺领域。主要包括以下步骤:1)图像采集机构分别获取在不同角度拍摄的槟榔图像;2)比较槟榔图像中目标面积大小,选择其中目标槟榔面积最大的槟榔图像,并将此参考面作为槟榔切割面;3)应用GrabCut算法对该槟榔图像进行轮廓提取;4)对3)中的结果图像二值化,计算出槟榔蒂两个端点坐标,通过坐标计算出槟榔旋转角度和偏移量。采用本方法能提高槟榔图像识别的速度和改善槟榔图像识别的精度,并以此指导槟榔切割设备准确切割槟榔。
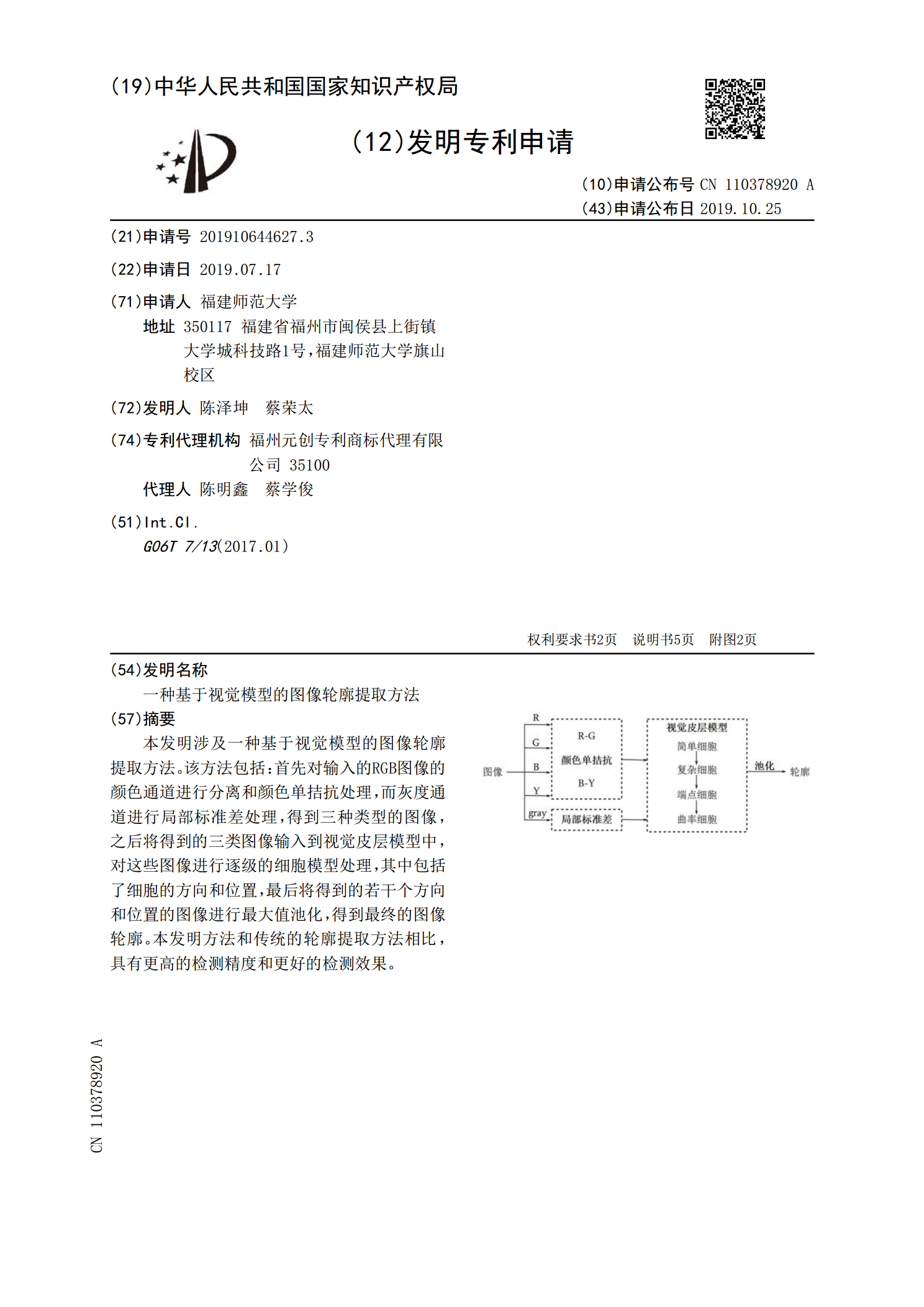
一种基于视觉模型的图像轮廓提取方法.pdf
本发明涉及一种基于视觉模型的图像轮廓提取方法。该方法包括:首先对输入的RGB图像的颜色通道进行分离和颜色单拮抗处理,而灰度通道进行局部标准差处理,得到三种类型的图像,之后将得到的三类图像输入到视觉皮层模型中,对这些图像进行逐级的细胞模型处理,其中包括了细胞的方向和位置,最后将得到的若干个方向和位置的图像进行最大值池化,得到最终的图像轮廓。本发明方法和传统的轮廓提取方法相比,具有更高的检测精度和更好的检测效果。
基于OpenCV的图像轮廓提取方法的实现.pdf
基于OpenCV的图像轮廓提取的实现【摘要】OpenCV是近几年来推出的一个开源的、免费的计算机视觉库.OpenCV的目标是构建一个简单易用的计算机视觉框架,利用它所包含的函数帮助开发人员方便快捷地实现图像处理和视频处理。而图像的轮廓是图像的一种基本特征,携带着一幅图像大部分的信息,经常被应用到较高层次的图像应用中。它在图像分离,图像识别和图像压缩等领域有很广泛的应用,也是图像处理的基础。本文首先阐述了OpenCV的特点和结构,然后采用一系列的可行性算法来获取图像特征参数并通过各种算子(Sobel算子,L