
一种精密轴系径向回转精度激光测量系统及方法.pdf

小新****ou


1/10

2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种精密轴系径向回转精度激光测量系统及方法.pdf
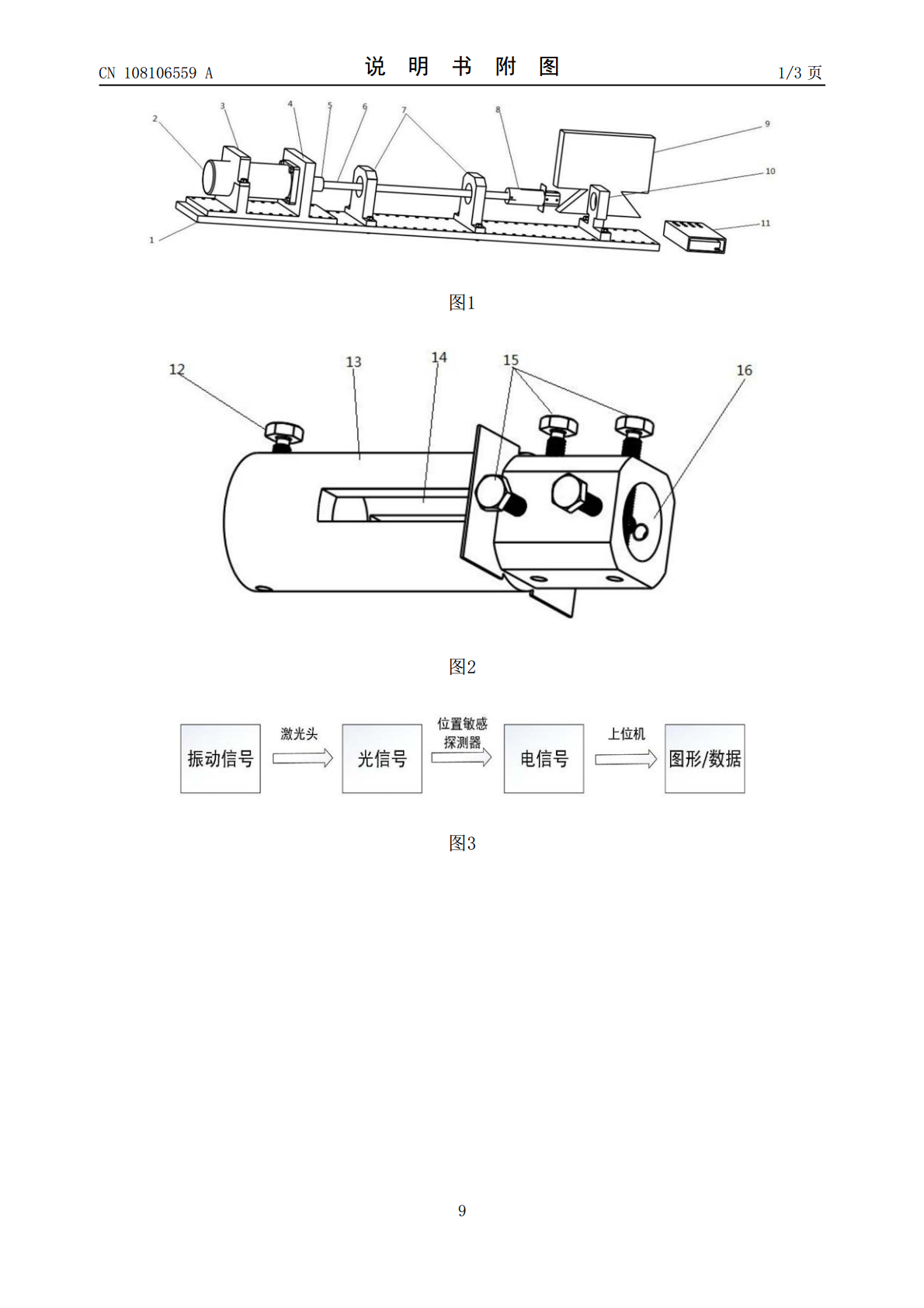
本发明公开了一种精密轴系径向回转精度激光测量系统及方法,该测量系统由转子振动平台、光源连接与发射部分、光学信息测量部分以及径向回转精度激光测量方法组成,在光源连接与发射部分设计了一种联轴器装置,将转轴、光源以及电源连为一体,实现转轴和激光头连接、紧固以及对心;测量部分采用位置敏感探测器进行光信号的采集,以便获得转轴的回转精度信息。本发明能够方便、快速、准确测量转轴回转精度,克服了以往测量系统中回转精度易受被测件形状轮廓误差影响的缺点,相比于传统的回转精度测量系统,能够实现回转精度的快速测量与处理,并且具有

精密轴系回转精度几何建模与分析.docx
精密轴系回转精度几何建模与分析概述:精密轴系的回转精度是指轴系在旋转运动时的相对稳定性和准确度。在机器加工、测试测量、精密仪器等领域中,精密轴系回转精度的要求越来越高。因此,对于轴系的几何建模与分析具有重要意义。1.精密轴系的几何建模精密轴系的几何模型建立需要考虑到轴系的几何形状、轴承和支座等几何参数。这些参数包括轴系的直径、长度、光洁度等,轴承的位置、尺寸、钢球直径等,支座的位置、形状和材料等。在建模过程中,需要采用高保真度的三维扫描技术和CAD软件进行建模。实际中,轴系的几何形状复杂度和加工精度一定程

面向激光追踪测量系统二维回转轴系的误差分析及精度保证.docx
面向激光追踪测量系统二维回转轴系的误差分析及精度保证激光追踪测量系统是一种常用的非接触式测量方法,具有高精度、高准确性、高灵敏度等优点,被广泛应用于机械制造、航空航天、光电子等领域。其中,二维回转轴系是激光追踪测量系统的重要组成部分之一,它的精度和稳定性直接影响着整个系统的测量精度和准确性。本文将从二维回转轴系的误差来源、误差分析以及精度保证三个方面来探讨如何提高激光追踪测量系统二维回转轴系的测量精度和准确性。误差来源二维回转轴系是由两个旋转轴和一个平移轴组成的,它们之间的相对精度和稳定性会影响整个系统的

精密轴系回转精度几何建模与分析的任务书.docx
精密轴系回转精度几何建模与分析的任务书任务概述:精密轴系是现代机械制造的基础部件,具有高精度、高可靠性等特点,广泛应用于机械加工、仪器仪表、光学器件等领域,具有重要的研究价值。本任务主要研究精密轴系回转精度的几何建模与分析,通过建立合理的模型和分析方法,分析精密轴系回转误差的来源、影响因素及其对系统性能的影响,为优化设计和制造提供理论依据和技术支持。任务内容:1.精密轴系回转误差的来源和分类,解析各种误差产生机理和影响因素;2.基于实际样机,建立精密轴系回转精度的几何模型;3.基于几何模型,开发误差分析和

评价轴系回转精度的新方法.docx
评价轴系回转精度的新方法标题:评价轴系回转精度的新方法摘要:回转精度是评价轴系稳定性和运动精准度的重要参数之一,《评价轴系回转精度的新方法》旨在探索一种新的方法来评价轴系回转精度。本论文基于传统的测量方法和现代的数据处理技术,提出了一种基于时间序列分析的新方法,通过对测量数据进行频谱分析和统计分析,结合极差和标准差等指标,综合评价轴系回转精度。实验证明,该方法在评价轴系回转精度方面有着一定的优势,有望在工业生产中得到应用。关键词:回转精度、轴系稳定性、运动精准度、时间序列分析、频谱分析1.引言回转精度是衡