
一种螺旋锥齿轮齿根干涉检验方法.pdf

小宏****aa

1/10
2/10

3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种螺旋锥齿轮齿根干涉检验方法.pdf
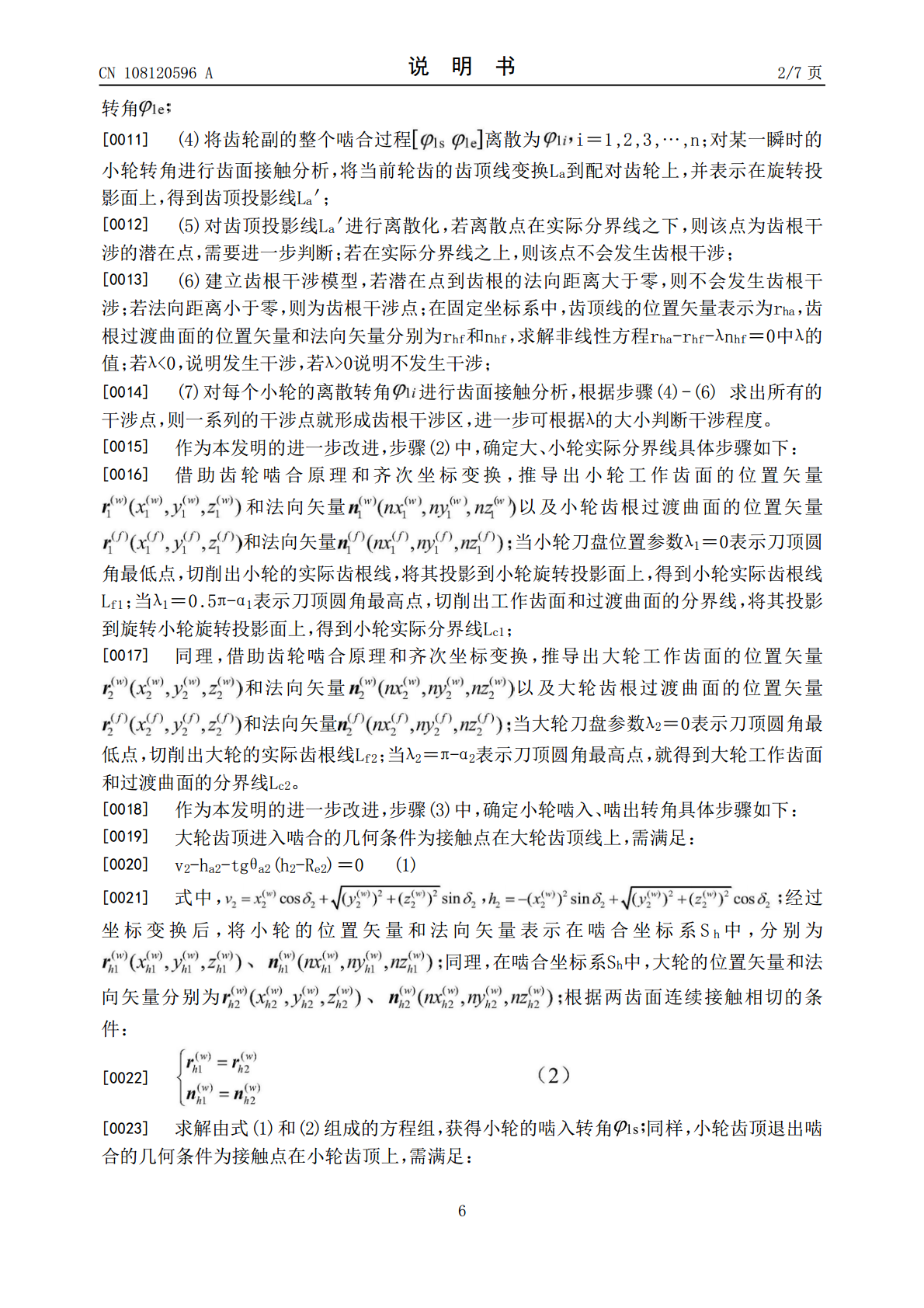
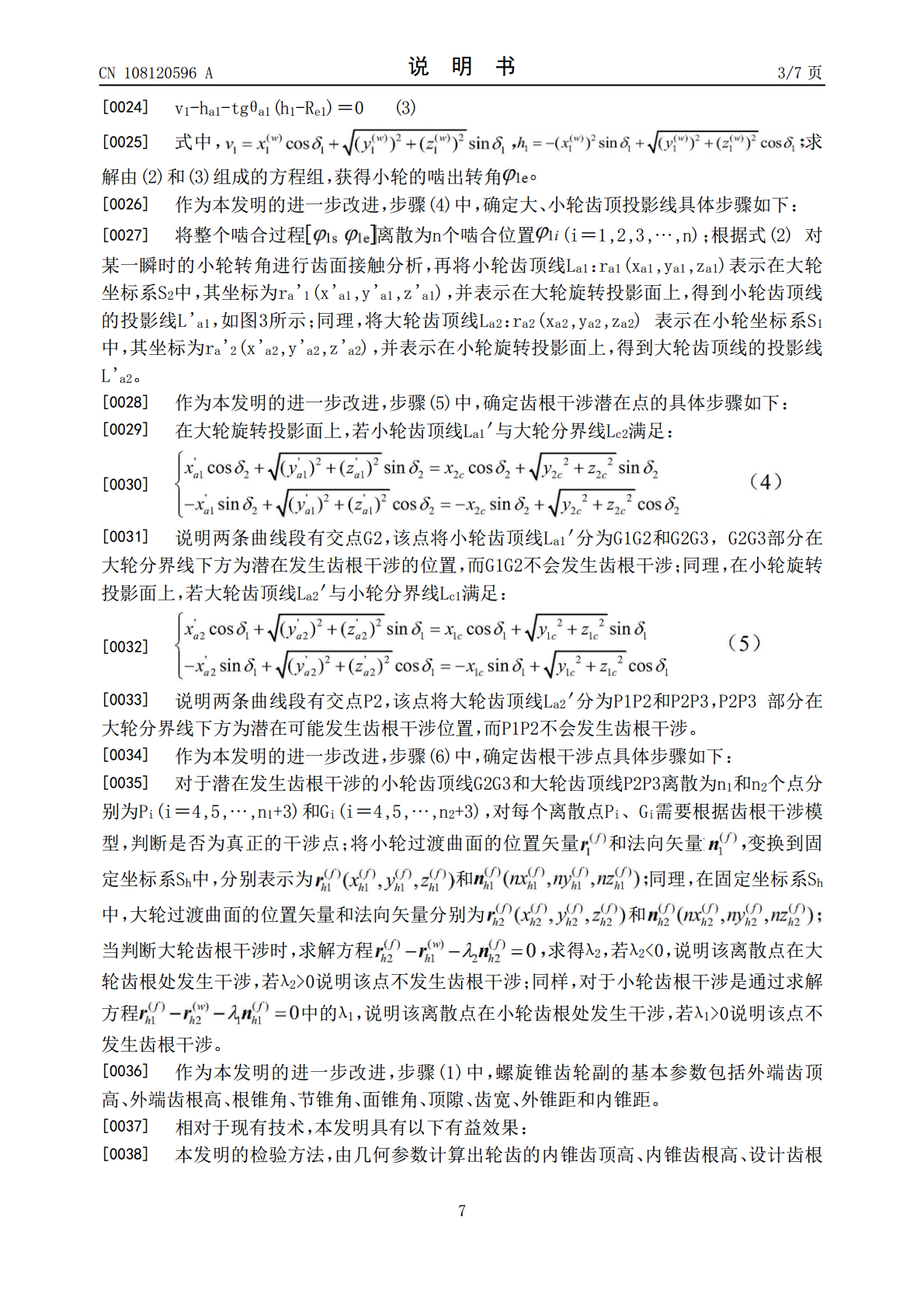
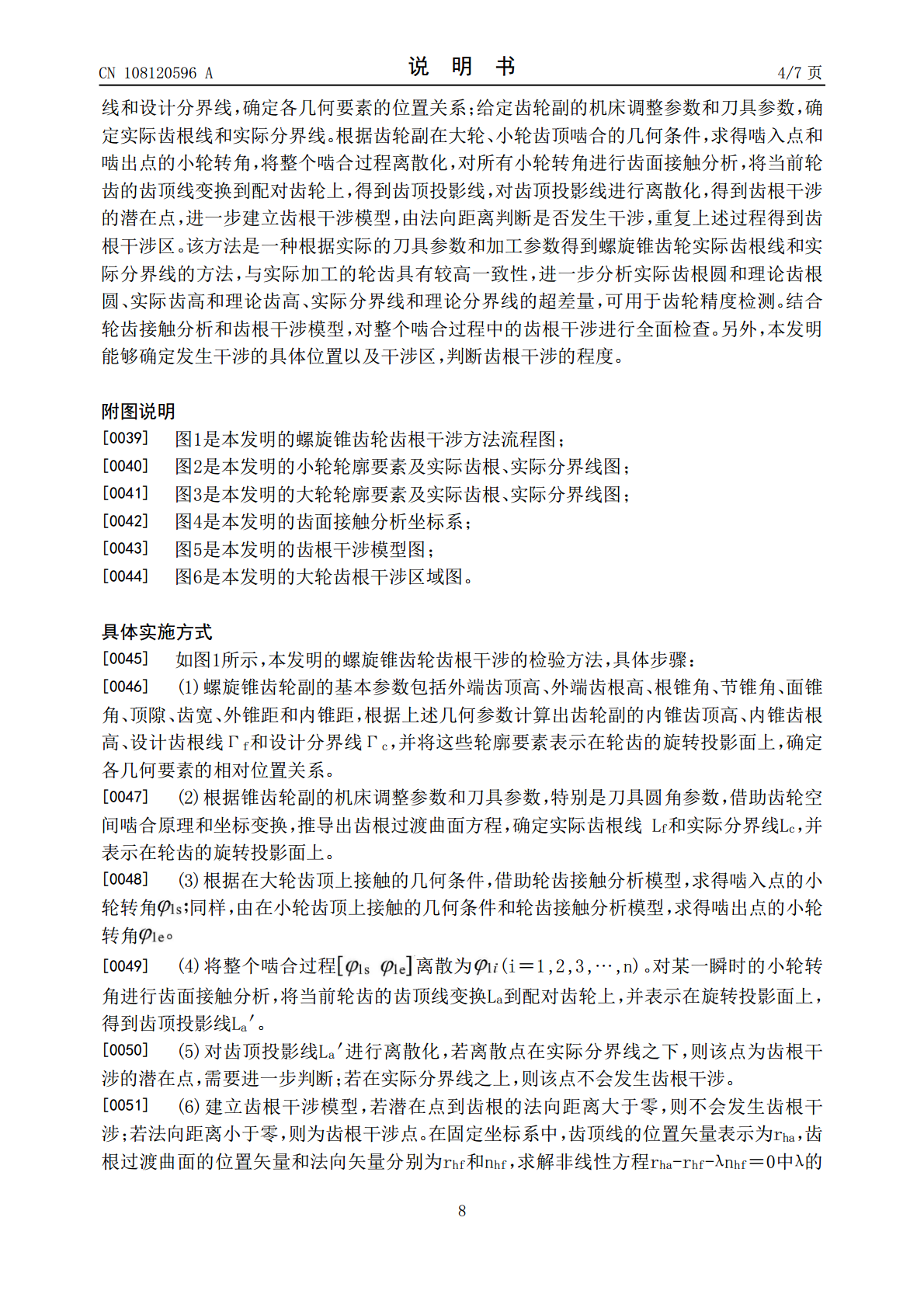
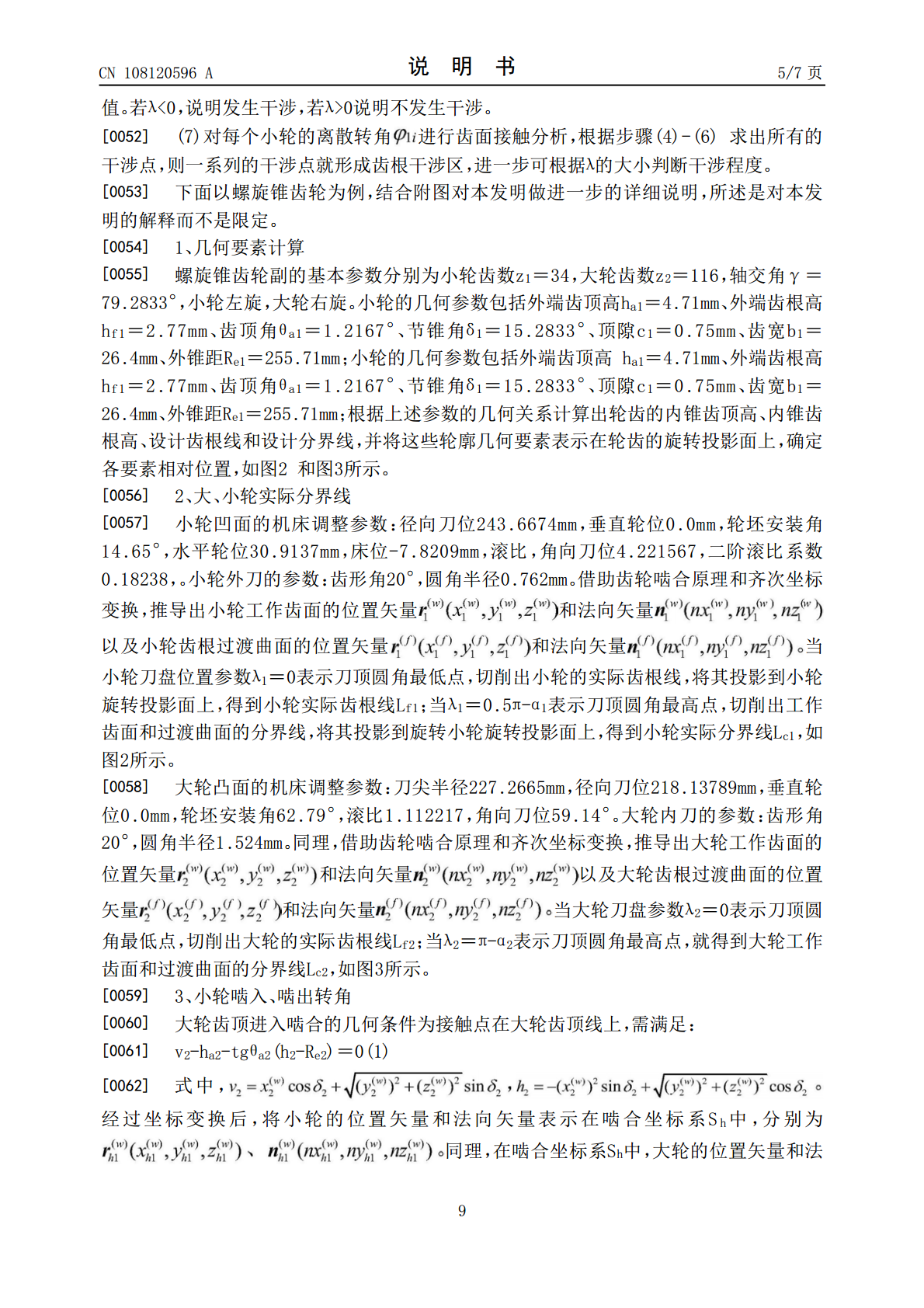
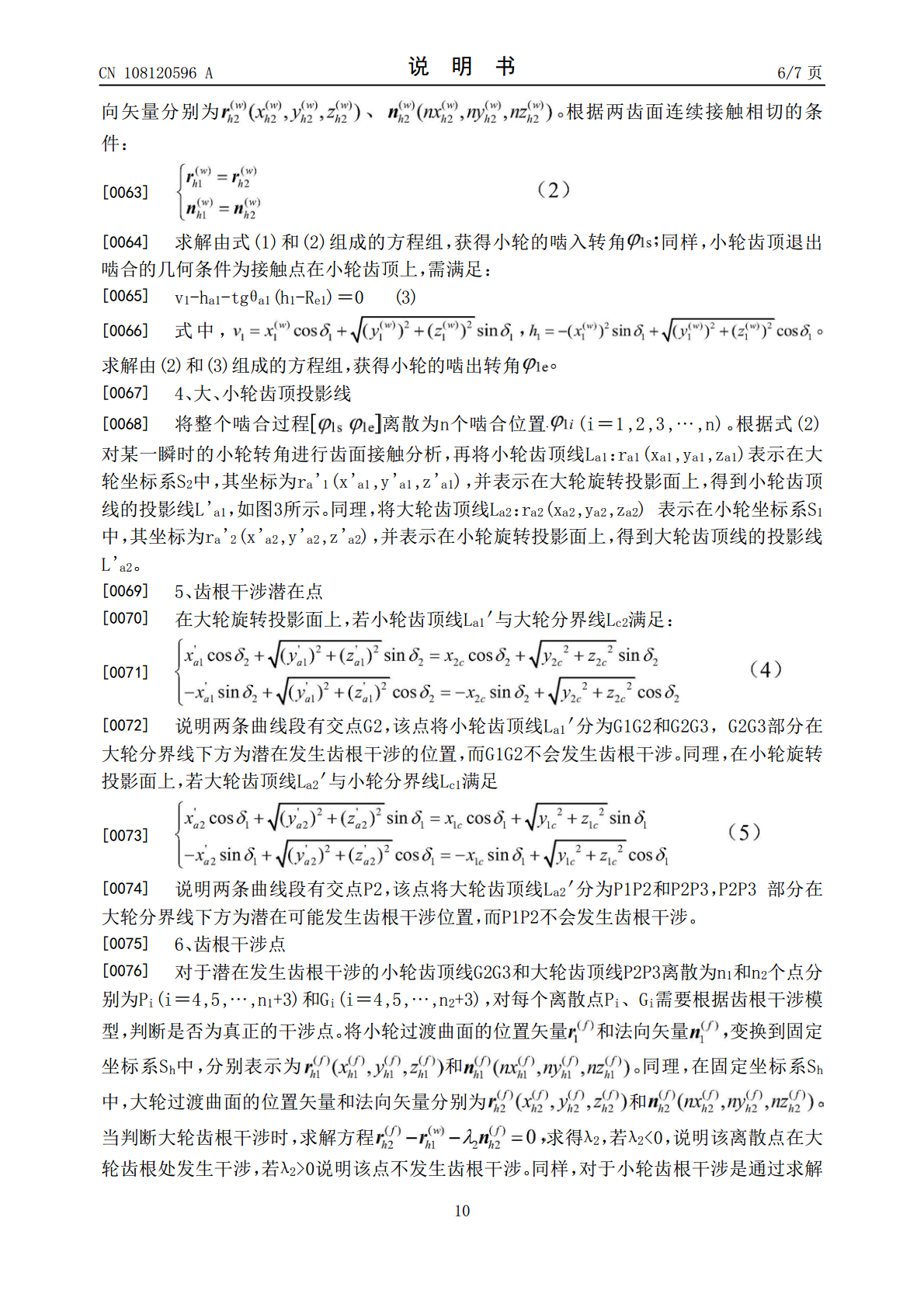
本发明公开一种螺旋锥齿轮齿根干涉的检验方法,由几何参数计算出轮齿的内锥齿顶高、内锥齿根高、设计齿根线和设计分界线,确定各几何要素的位置关系;给定齿轮副的机床调整参数和刀具参数,确定实际齿根线和实际分界线。根据齿轮副在大轮、小轮齿顶啮合的几何条件,求得啮入点和啮出点的小轮转角,将整个啮合过程离散化,对所有小轮转角进行齿面接触分析,将当前轮齿的齿顶线变换到配对齿轮上,得到齿顶投影线,对齿顶投影线进行离散化,得到齿根干涉的潜在点,进一步建立齿根干涉模型,由法向距离判断是否发生干涉,重复上述过程得到齿根干涉区。该

基于摆线的螺旋锥齿轮齿根过渡圆弧研究.docx
基于摆线的螺旋锥齿轮齿根过渡圆弧研究摆线螺旋锥齿轮是一种重要的机械传动元件,在各种机械设备和机械传动系统中广泛应用。它的主要特点是适用于高速和高载荷传动,体积小、重量轻、传动效率高、噪音低、运行平稳等。由于其具有诸多优点,摆线螺旋锥齿轮已成为各行各业中的重要组成部分。然而,在摆线螺旋锥齿轮的设计和制造过程中,齿根过渡圆弧的设计和制造一直以来都是一个难点问题。在实际应用中,齿根过渡圆弧的形状和尺寸直接影响着摆线螺旋锥齿轮的传动性能和寿命。因此,研究基于摆线的螺旋锥齿轮齿根过渡圆弧的设计和制造技术,具有十分重
考虑齿根弯曲强度的螺旋锥齿轮齿面加载性能优化方法.pdf
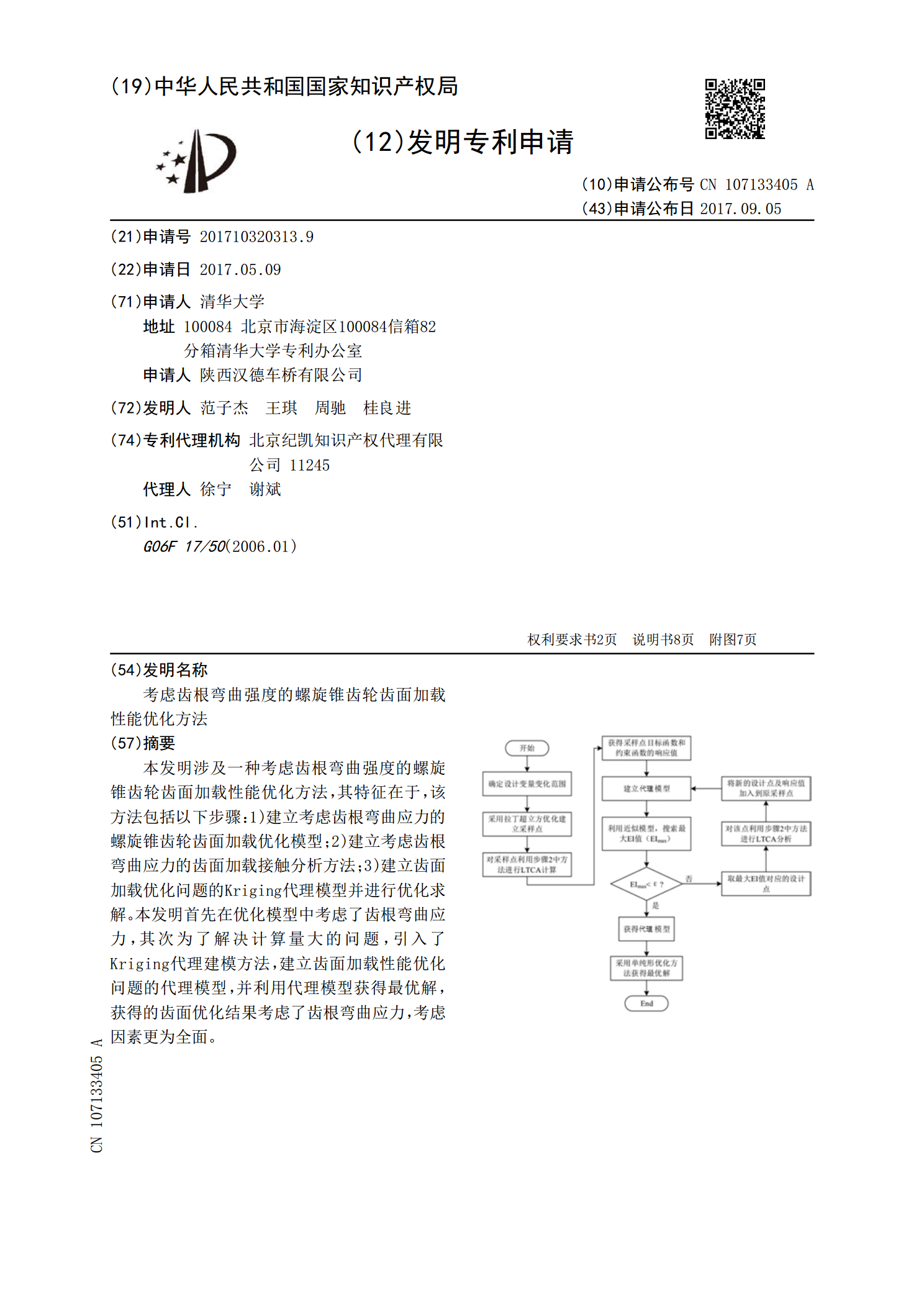
本发明涉及一种考虑齿根弯曲强度的螺旋锥齿轮齿面加载性能优化方法,其特征在于,该方法包括以下步骤:1)建立考虑齿根弯曲应力的螺旋锥齿轮齿面加载优化模型;2)建立考虑齿根弯曲应力的齿面加载接触分析方法;3)建立齿面加载优化问题的Kriging代理模型并进行优化求解。本发明首先在优化模型中考虑了齿根弯曲应力,其次为了解决计算量大的问题,引入了Kriging代理建模方法,建立齿面加载性能优化问题的代理模型,并利用代理模型获得最优解,获得的齿面优化结果考虑了齿根弯曲应力,考虑因素更为全面。
一种螺旋锥齿轮加工方法.pdf
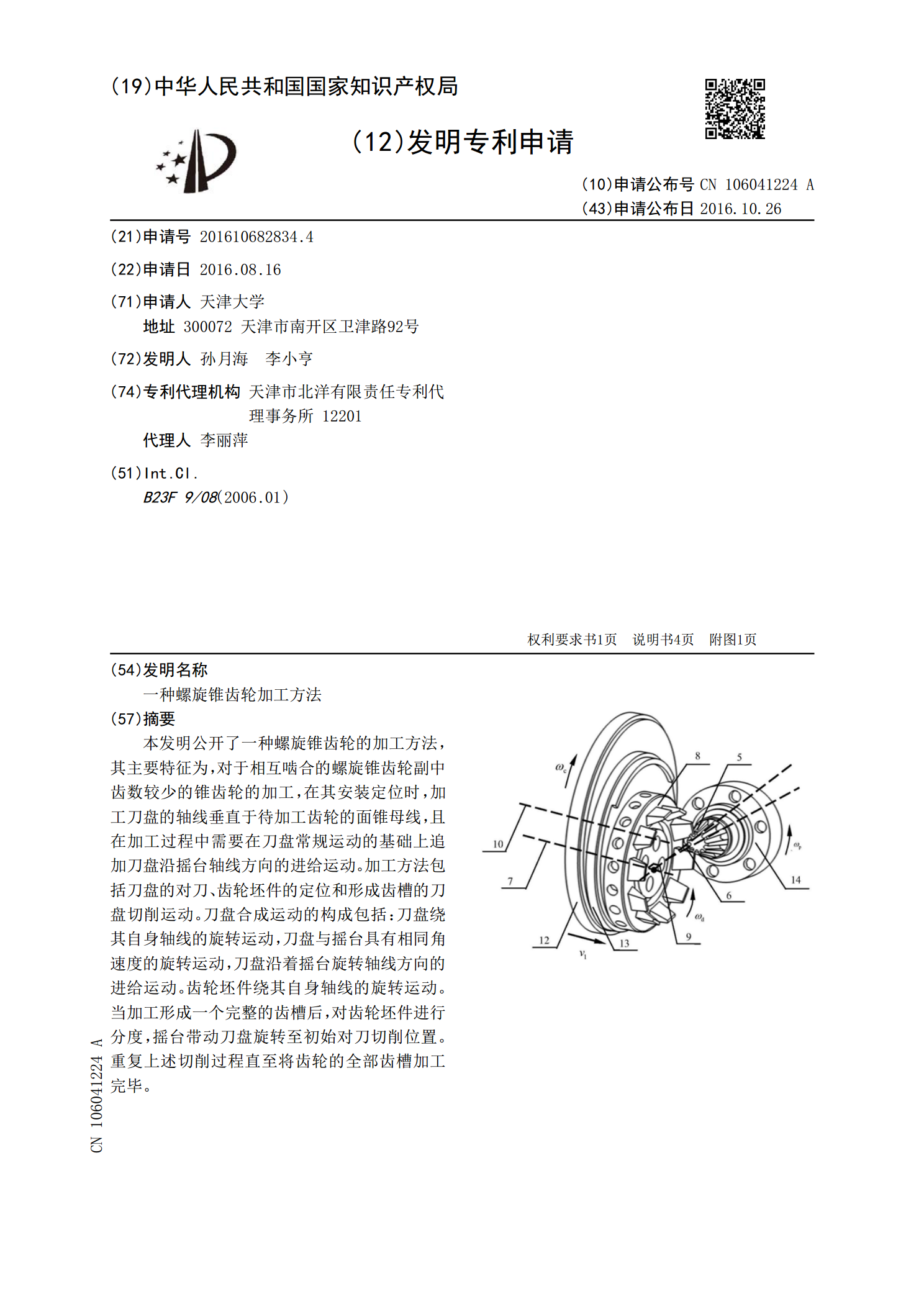
本发明公开了一种螺旋锥齿轮的加工方法,其主要特征为,对于相互啮合的螺旋锥齿轮副中齿数较少的锥齿轮的加工,在其安装定位时,加工刀盘的轴线垂直于待加工齿轮的面锥母线,且在加工过程中需要在刀盘常规运动的基础上追加刀盘沿摇台轴线方向的进给运动。加工方法包括刀盘的对刀、齿轮坯件的定位和形成齿槽的刀盘切削运动。刀盘合成运动的构成包括:刀盘绕其自身轴线的旋转运动,刀盘与摇台具有相同角速度的旋转运动,刀盘沿着摇台旋转轴线方向的进给运动。齿轮坯件绕其自身轴线的旋转运动。当加工形成一个完整的齿槽后,对齿轮坯件进行分度,摇台带
螺旋锥齿轮凹模齿面设计方法及螺旋锥齿轮加工方法.pdf
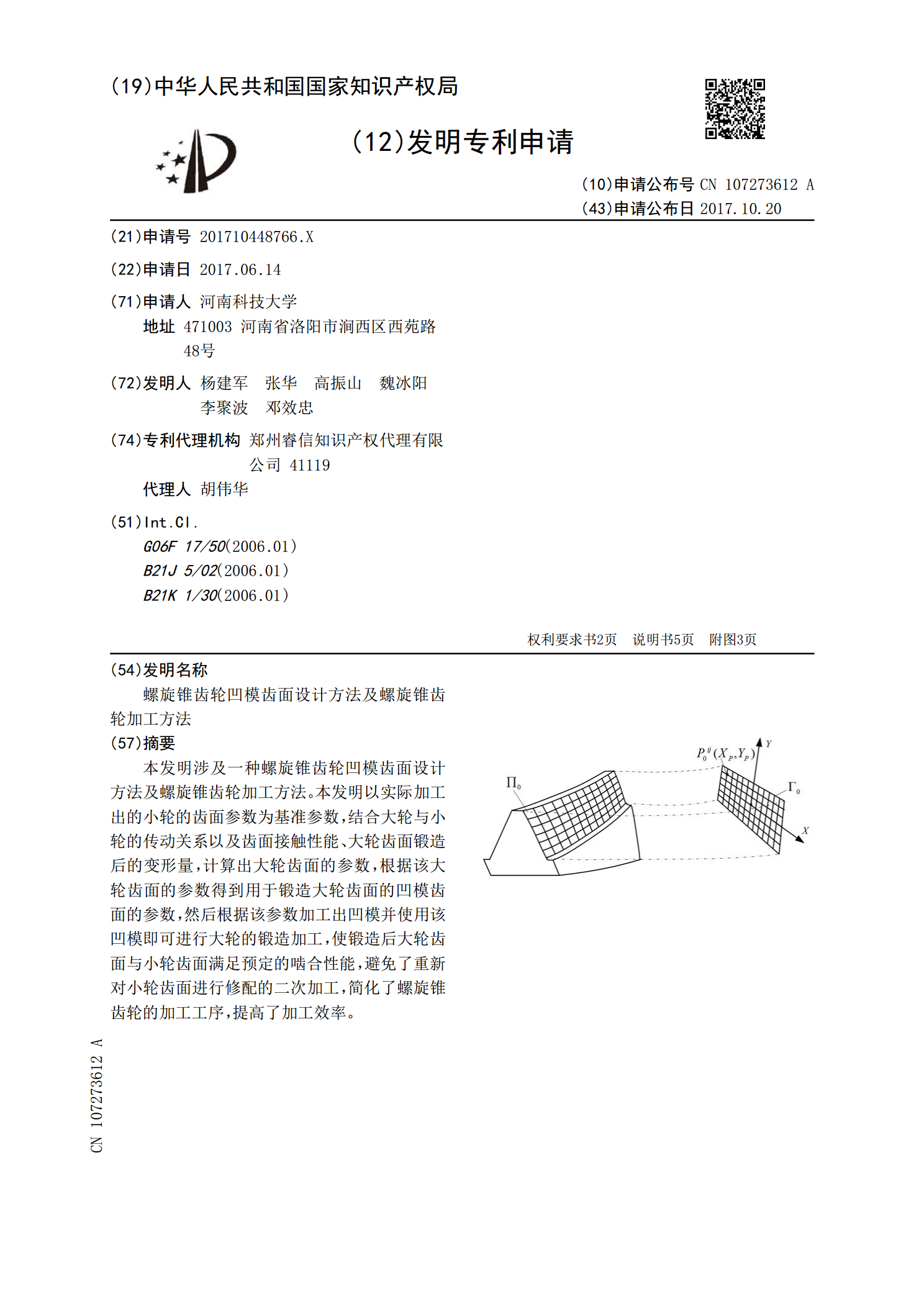
本发明涉及一种螺旋锥齿轮凹模齿面设计方法及螺旋锥齿轮加工方法。本发明以实际加工出的小轮的齿面参数为基准参数,结合大轮与小轮的传动关系以及齿面接触性能、大轮齿面锻造后的变形量,计算出大轮齿面的参数,根据该大轮齿面的参数得到用于锻造大轮齿面的凹模齿面的参数,然后根据该参数加工出凹模并使用该凹模即可进行大轮的锻造加工,使锻造后大轮齿面与小轮齿面满足预定的啮合性能,避免了重新对小轮齿面进行修配的二次加工,简化了螺旋锥齿轮的加工工序,提高了加工效率。