
基于形状上下文特征的定位方法.pdf

一只****呀9


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于形状上下文特征的定位方法.pdf
本发明公开了一种基于形状上下文特征的定位方法,该方法包括:S1,对工件进行图像采集并进行预处理;S2,对工件图像进行阀值分割以提取轮廓图像;S3,从已检测出的轮廓中识别工件轮廓;S4,对左右图进行立体匹配;S5,获取抓取点的三维坐标信息。本发明方案利用形状上下文特征检测算法在已检测出的轮廓中识别工件轮廓,采用直方图结合Harris角点进行特征生成与匹配,加快了匹配速度,具有较高的精度,且对环境变化有一定的适应能力,能较精准地对工件进行定位。

基于形状上下文特征的快速目标检测方法研究.docx
基于形状上下文特征的快速目标检测方法研究摘要目标检测是计算机视觉领域的重点研究领域,其主要目的是识别并定位一幅图像中的目标物体。随着计算机硬件性能的提升和算法技术的不断进步,目标检测已经成为诸多实际应用场景中不可或缺的技术手段之一。本文将基于形状上下文特征,提出一种快速目标检测方法。该方法通过将目标物体轮廓转化为一组形状上下文特征,利用模板匹配的方式进行目标检测。实验结果表明,该方法具有较高的识别率和较快的检测速度,可以有效地应用于实际场景中。关键词:目标检测;形状上下文特征;模板匹配;实时性1.引言目标

基于改进形状上下文特征的二值图像检索.docx
基于改进形状上下文特征的二值图像检索摘要随着数字图像存储设备的大量使用,图像检索系统的需求越来越高。在这个过程中,形状描述符作为一种简单、快速、准确的描述图像形状的手段,受到广泛关注。已有的形状描述符存在一些问题,如旋转不变性、尺度不变性、噪声鲁棒性等方面的限制。本文将介绍一种改进的形状上下文字(SC)特征,在二值图像检索中能够有效地提高检索的准确性和鲁棒性。实验结果表明,相比于其他形状描述符,该方法具有更好的检索性能和更高的鲁棒性。关键词:形状描述符,形状上下文字(SC)特征,二值图像检索,鲁棒性1.引

基于内距离形状上下文的跌倒检测方法.docx
基于内距离形状上下文的跌倒检测方法基于内距离形状上下文的跌倒检测方法摘要:随着人口老龄化的加剧,跌倒问题日益引起人们的关注。跌倒是老年人中十分常见的意外,严重的跌倒事故常常导致骨折等严重后果。因此,准确、及时地检测老年人的跌倒行为变得非常重要。本文提出了一种基于内距离形状上下文的跌倒检测方法,通过分析人体姿势的特征,识别跌倒的模式,从而进行跌倒的自动检测。关键词:跌倒检测;内距离形状上下文;人体姿势;特征提取;模式识别1.引言随着全球人口老龄化程度的加剧,跌倒问题日益突出。老年人因为动作迟缓、平衡能力差等
一种基于形状上下文和HOG特征的异源图像配准方法.pdf
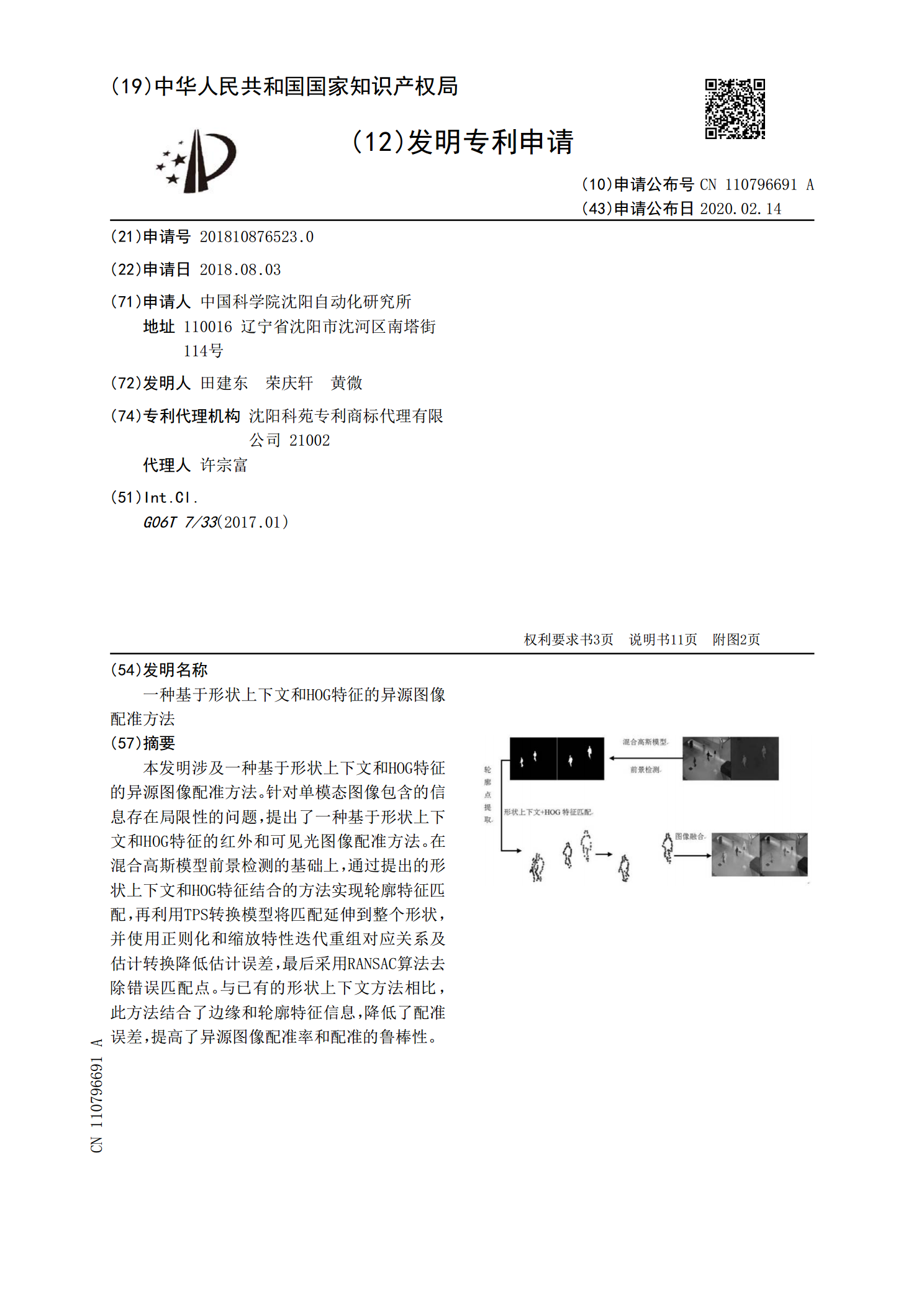
本发明涉及一种基于形状上下文和HOG特征的异源图像配准方法。针对单模态图像包含的信息存在局限性的问题,提出了一种基于形状上下文和HOG特征的红外和可见光图像配准方法。在混合高斯模型前景检测的基础上,通过提出的形状上下文和HOG特征结合的方法实现轮廓特征匹配,再利用TPS转换模型将匹配延伸到整个形状,并使用正则化和缩放特性迭代重组对应关系及估计转换降低估计误差,最后采用RANSAC算法去除错误匹配点。与已有的形状上下文方法相比,此方法结合了边缘和轮廓特征信息,降低了配准误差,提高了异源图像配准率和配准的鲁棒