
一种拖拉机电动悬挂举升系统及其控制方法.pdf

睿达****的的


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种拖拉机电动悬挂举升系统及其控制方法.pdf
本发明公开了一种拖拉机电动悬挂举升系统及其控制方法,该悬挂举升系统包括机械结构部分和电气控制部分;机械结构部分包括举升装置,举升装置包括驱动电机、减速器和丝杠螺母机构;车架上固设有支架,支架上固定连接一个转动底座,丝杠设置在转动底座内部设有的轴承内部。电气控制部分包括控制器、驱动器、电机、GPS测速器和轮速传感器,控制器连接驱动器,驱动器连接电机,GPS测速器安装在车架上,轮速传感器安装在驱动轮上;轮速传感器和GPS测速器通过CAN总线与控制器通信。本发明具有阻力调节和位置调节的功能,通过加装GPS测速器

一种电动拖拉机新型电液调平悬挂系统及其控制方法.pdf
本发明提供一种电动拖拉机新型电液调平悬挂系统及其控制方法。采用单侧调平液压缸与提升杆配合的结构,调节液压缸活塞杆的伸缩量控制悬挂农机具横向位置的旋转角度和倾斜趋势,实现农机具和地面相对位置的调整。采用模糊PID算法的控制方式对倾斜角度的误差和误差率实时调整。采用中心不动调平法来保证机具的实时水平,得到了提升液压缸的伸缩量或机械提升臂角度变化值对应犁耕深度的关系式;由调平液压缸的伸缩量计算得到变化角度,由传感器将所得信号通过一阶惯性滤波处理返回给控制器。本方法简化了农机具在作业时的步骤,提高了多铧犁农机具在
一种电动拖拉机用直驱式电液悬挂系统及其控制方法.pdf
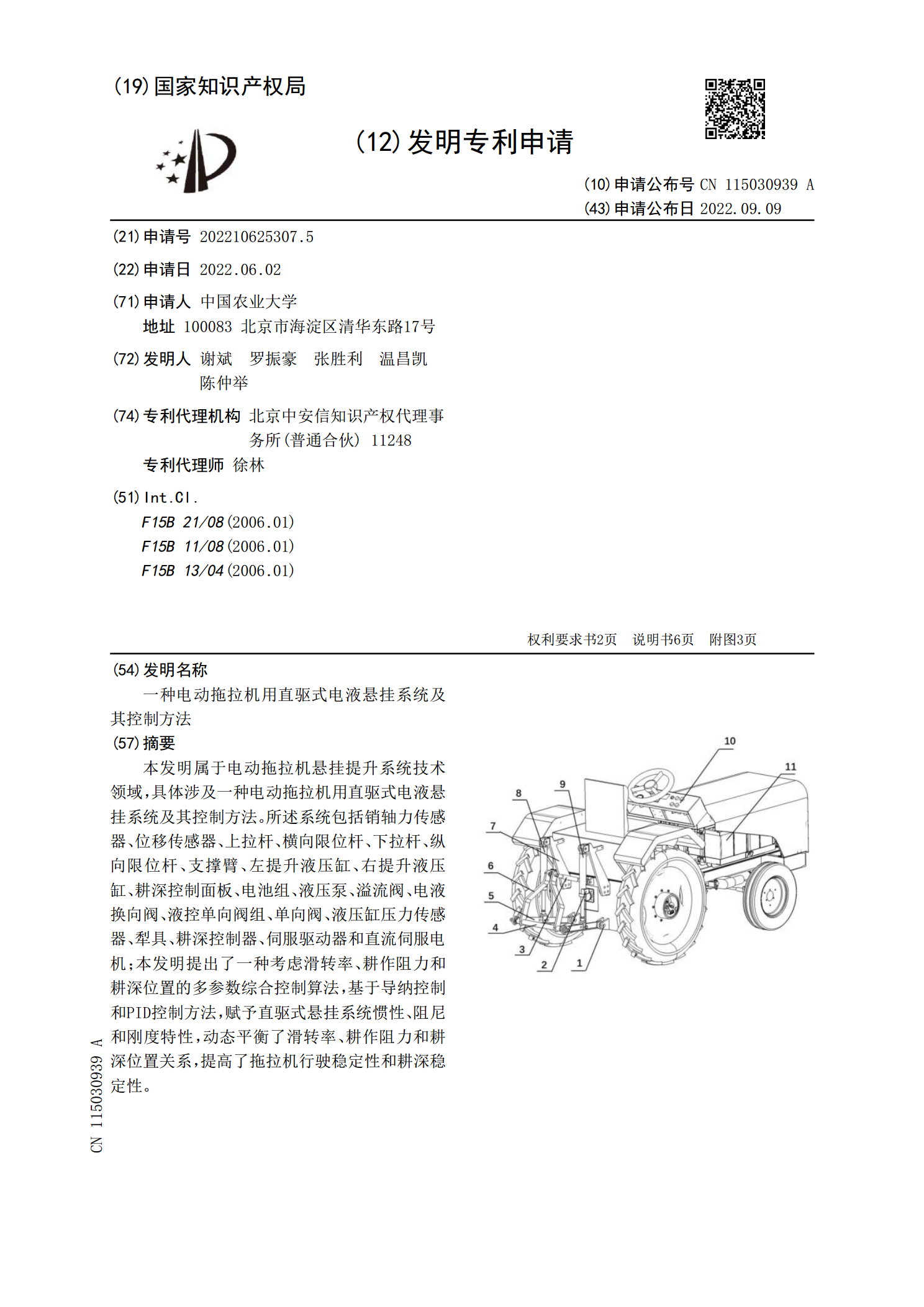
本发明属于电动拖拉机悬挂提升系统技术领域,具体涉及一种电动拖拉机用直驱式电液悬挂系统及其控制方法。所述系统包括销轴力传感器、位移传感器、上拉杆、横向限位杆、下拉杆、纵向限位杆、支撑臂、左提升液压缸、右提升液压缸、耕深控制面板、电池组、液压泵、溢流阀、电液换向阀、液控单向阀组、单向阀、液压缸压力传感器、犁具、耕深控制器、伺服驱动器和直流伺服电机;本发明提出了一种考虑滑转率、耕作阻力和耕深位置的多参数综合控制算法,基于导纳控制和PID控制方法,赋予直驱式悬挂系统惯性、阻尼和刚度特性,动态平衡了滑转率、耕作阻力
拖拉机电动悬挂自适应控制系统及控制方法.pdf
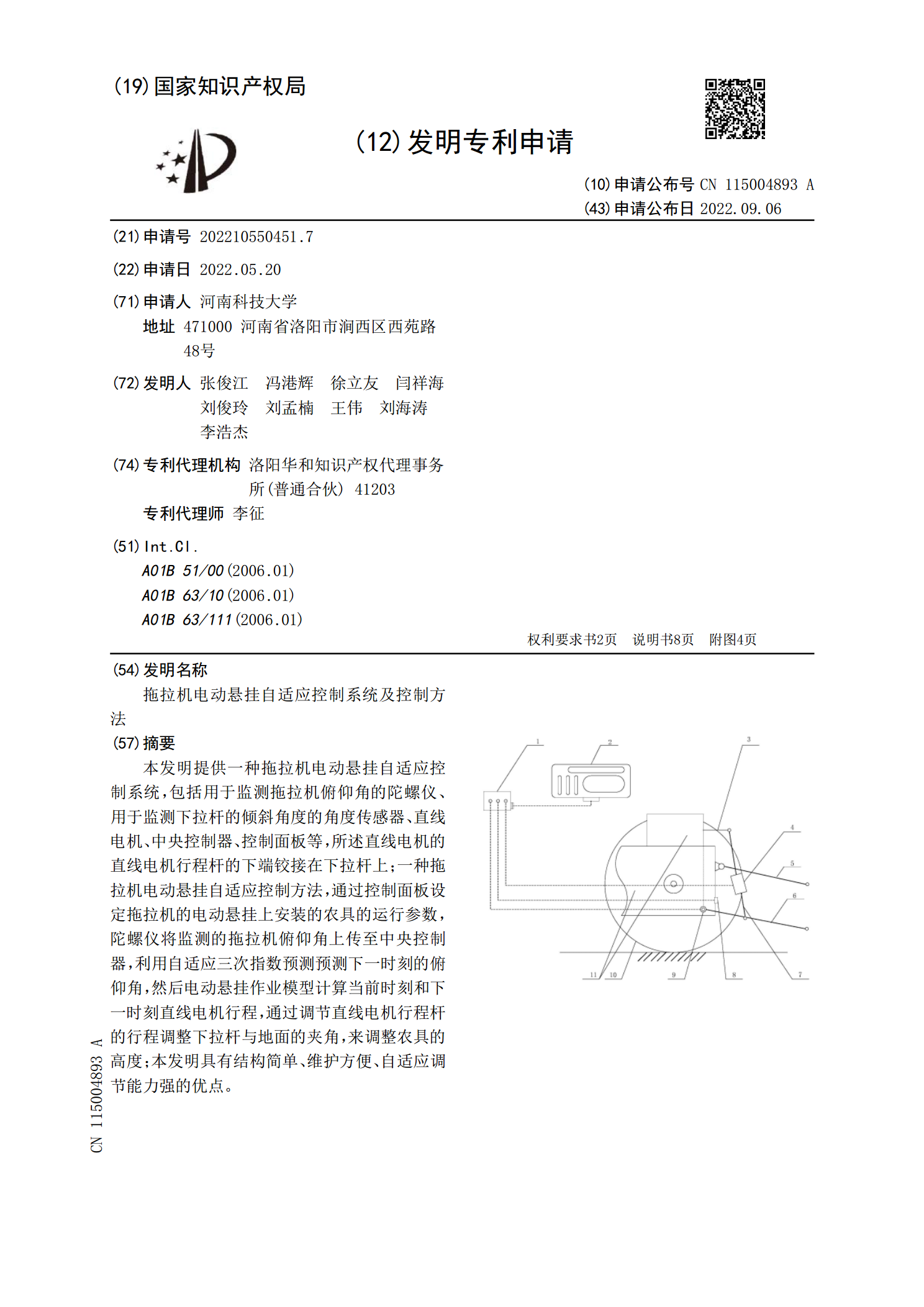
本发明提供一种拖拉机电动悬挂自适应控制系统,包括用于监测拖拉机俯仰角的陀螺仪、用于监测下拉杆的倾斜角度的角度传感器、直线电机、中央控制器、控制面板等,所述直线电机的直线电机行程杆的下端铰接在下拉杆上;一种拖拉机电动悬挂自适应控制方法,通过控制面板设定拖拉机的电动悬挂上安装的农具的运行参数,陀螺仪将监测的拖拉机俯仰角上传至中央控制器,利用自适应三次指数预测预测下一时刻的俯仰角,然后电动悬挂作业模型计算当前时刻和下一时刻直线电机行程,通过调节直线电机行程杆的行程调整下拉杆与地面的夹角,来调整农具的高度;本发明

一种基于电液动推杆的电动拖拉机悬挂系统及控制方法.pdf
本发明的一种基于电液动推杆的电动拖拉机悬挂系统及控制方法,该悬挂系统包括控制面板、悬挂控制器、位移传感器、拉力传感器、轮速传感器、雷达测速传感器、电液动推杆以及三点悬挂装置;所述电液动推杆包括电机、液压泵、液压集成阀组和液压缸,所述三点悬挂装置包括上拉杆、下拉杆、提升臂和提升杆;本发明中,电动拖拉机悬挂系统耕深控制采用力位—滑转率综合调节,提高电动拖拉机的作业质量和作业效率。克服现有生产的电动拖拉机电动悬挂装置在实际工作过程中抗冲击强度差、机构结构磨损严重、故障率高等问题以及拖拉机滑转率变化较大时,影响拖