
一种高空探果无伤扭转式水果采摘爪.pdf

东耀****哥哥


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种高空探果无伤扭转式水果采摘爪.pdf
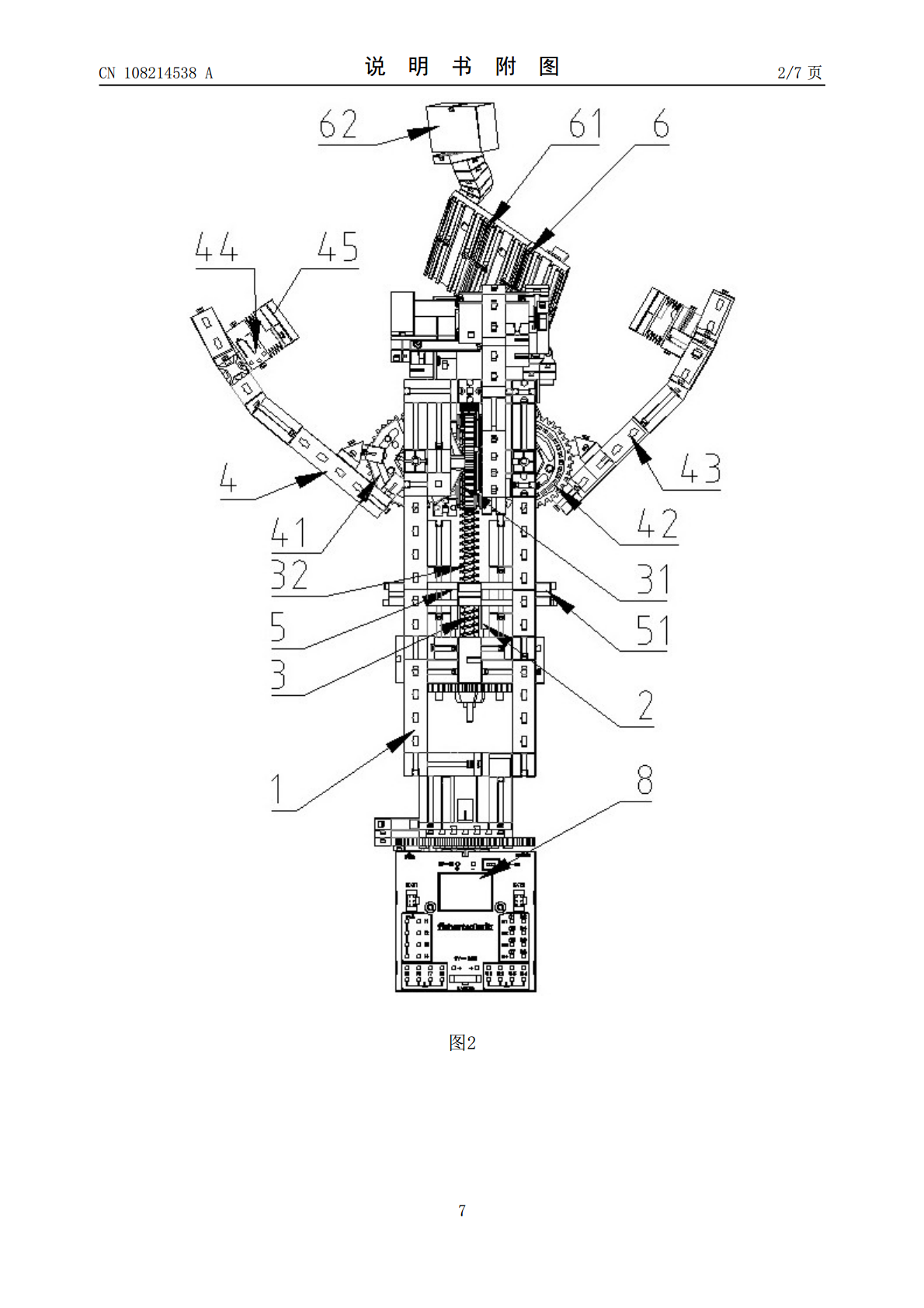
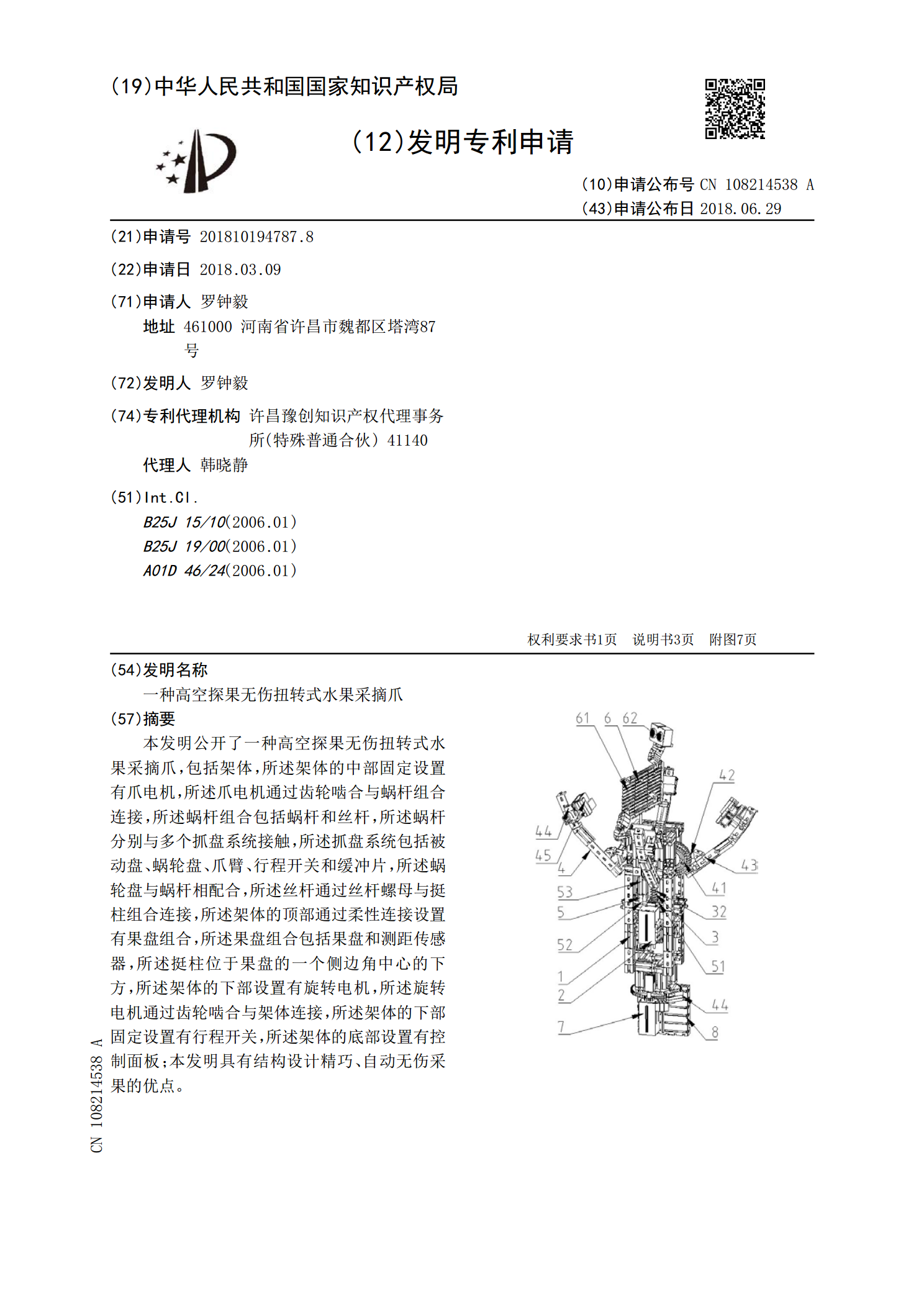
本发明公开了一种高空探果无伤扭转式水果采摘爪,包括架体,所述架体的中部固定设置有爪电机,所述爪电机通过齿轮啮合与蜗杆组合连接,所述蜗杆组合包括蜗杆和丝杆,所述蜗杆分别与多个抓盘系统接触,所述抓盘系统包括被动盘、蜗轮盘、爪臂、行程开关和缓冲片,所述蜗轮盘与蜗杆相配合,所述丝杆通过丝杆螺母与挺柱组合连接,所述架体的顶部通过柔性连接设置有果盘组合,所述果盘组合包括果盘和测距传感器,所述挺柱位于果盘的一个侧边角中心的下方,所述架体的下部设置有旋转电机,所述旋转电机通过齿轮啮合与架体连接,所述架体的下部固定设置有行
一种高空水果采摘器.pdf
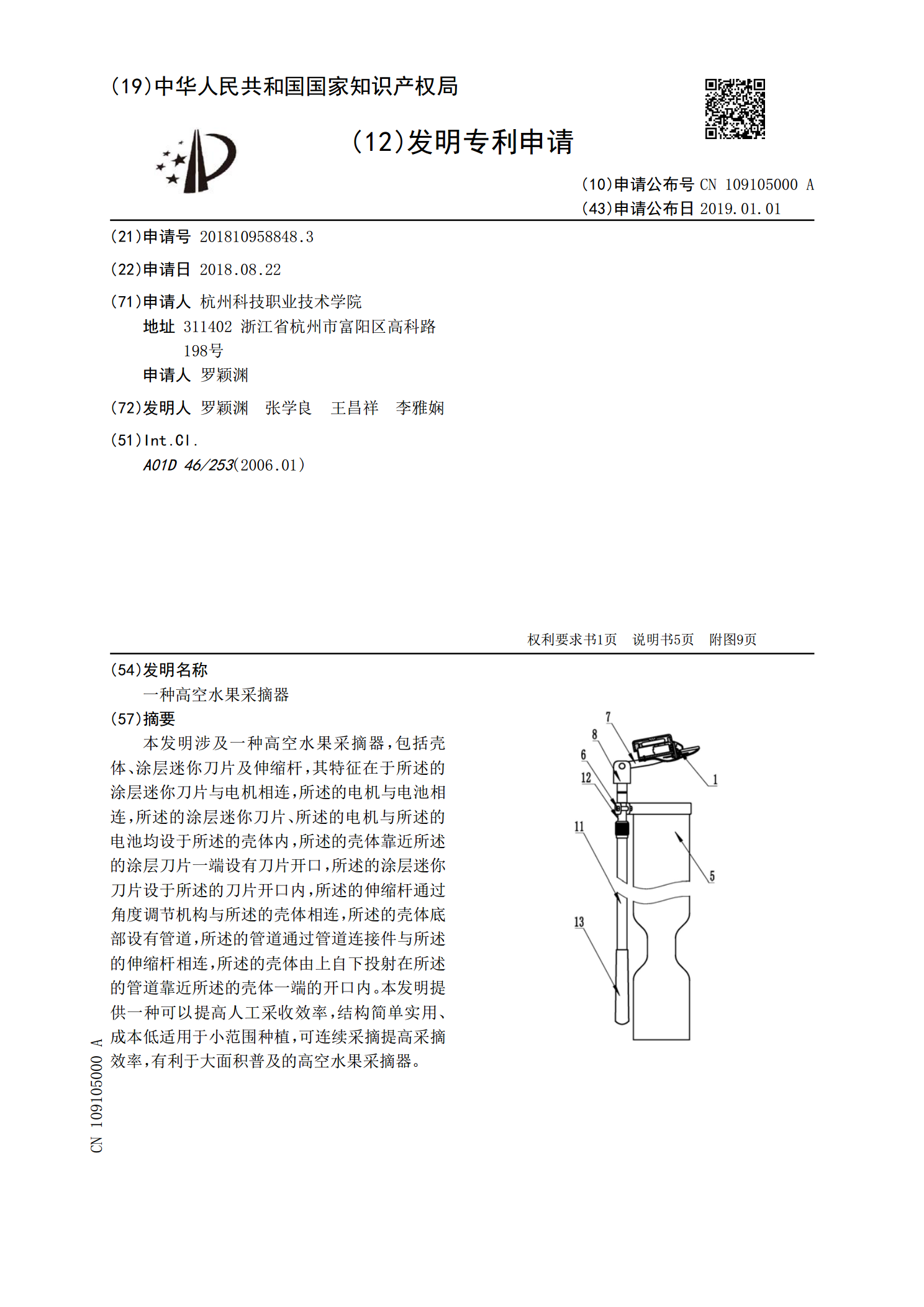
本发明涉及一种高空水果采摘器,包括壳体、涂层迷你刀片及伸缩杆,其特征在于所述的涂层迷你刀片与电机相连,所述的电机与电池相连,所述的涂层迷你刀片、所述的电机与所述的电池均设于所述的壳体内,所述的壳体靠近所述的涂层刀片一端设有刀片开口,所述的涂层迷你刀片设于所述的刀片开口内,所述的伸缩杆通过角度调节机构与所述的壳体相连,所述的壳体底部设有管道,所述的管道通过管道连接件与所述的伸缩杆相连,所述的壳体由上自下投射在所述的管道靠近所述的壳体一端的开口内。本发明提供一种可以提高人工采收效率,结构简单实用、成本低适用于

高空水果采摘装置.pdf
本发明公开一种高空水果采摘装置,包括:支撑脚架;旋转体,设置于所述支撑脚架之上,并可绕所述支撑脚架沿水平方向360度旋转;伸缩杆,设置于所述旋转体上,并可绕所述旋转体沿垂直方向90度旋转;剪切机构,设置于所述伸缩杆上,包括手轮、连接绳、剪刀以及弹簧,所述手轮设置于所述伸缩杆上靠近所述旋转体的一端,所述剪刀设置于所述伸缩杆上远离所述旋转体的另一端;以及落果机构,靠近所述剪刀设置,包括钢圈及设置于所述钢圈上的网兜,所述钢圈位于所述剪刀下方,所述网兜为长筒状弹性结构,所述网兜的初始直径h小于待采摘水果的平均直径

小型水果高空框装剪刀式采摘器.pdf
本实用新型介绍了一种小型水果高空框装剪刀式采摘器,它包括支撑杆,在所述支撑杆的上部套有一个篮筐,所述篮筐为上端开口的圆筒形状,篮筐的底部固定在支撑杆上;在所述支撑杆的顶部安装有一个连接头,所述连接头的下端与支撑杆的顶端螺纹连接,在所述连接头的顶端安装有用于剪切水果的剪刀;在所述篮筐内还安装有称重传感器,所述称重传感器固定在篮筐的内侧底面上,所述称重传感器的输出端通过穿过支撑杆的导线与显示屏电连接,所述显示屏安装在支撑杆的下部,在显示屏下方的支撑杆上还安装有用于启动显示屏的控制按钮,所述控制按钮与显示屏上的

一种压力可控的扭转式自动果蔬采摘机械手.pdf
本发明公开了一种压力可控的扭转式自动果蔬采摘机械手,包括抓取单元、旋转驱动单元、扭矩控制单元以及自动识别单元。所述抓取单元包括上限位盘、导向圆盘、推进圆盘、下限位盘以及机械手;所述扭矩控制单元包括球形销、弹簧、弹簧支撑座以及旋转螺母;所述自动识别单元包括控制器、红外传感器、电机驱动模块以及电源模块。本发明通过齿轮传动以及红外传感器的判断,推动推进圆盘旋转,驱动机械爪压紧果蔬后,扭矩控制单元控制抓取单元扭转,分离果蔬,而后电机反转收回机械爪,果蔬落入下落管道。该机械手可通过预设压力控制抓紧力,结构紧凑,简化