
智能机器人移动平台.pdf

子璇****君淑


1/10

2/10

3/10

4/10

5/10

6/10
7/10

8/10

9/10

10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
智能机器人移动平台.pdf
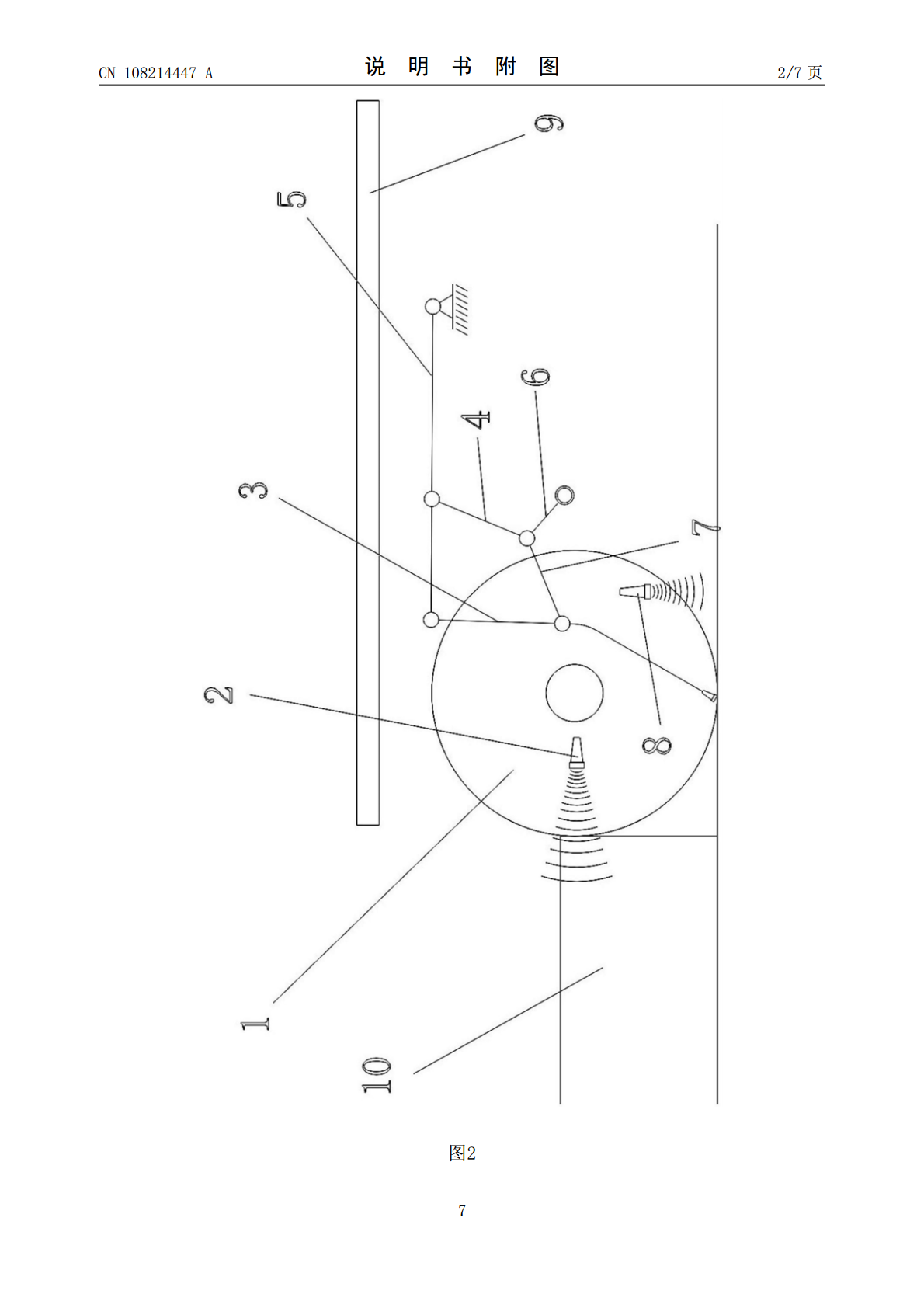
智能机器人移动平台,本发明属智能机器人行走机构中的一个技术领域。为了使轮式或履带式机器人的移动平台能自主地跨越圆角台阶,本发明在轮式智能机器人移动平台上安装摄像头、测距装置和计算机,摄像头和测距装置连接计算机,连架杆5的一端铰接在机架上,连架杆5的另一端铰接在撑杆3的一端上,连杆7的一端铰接在撑杆3上,连杆4的一端铰接在连架杆5上,驱动装置可驱动曲柄6旋转,曲柄6可通过连杆4、连杆7带动连架杆5摆动和撑杆3向上或向下和水平的复合运动,驱动智能机器人移动平台跨越圆角台阶;本智能机器人移动平台在跨越台阶时并不

智能物料机器人-移动平台的开发设计.docx
北京理工大学珠海学院2020届本科毕业生设计智能物料机器人—机器人移动平台的设计学院:工业自动化学院专业:机械电子工程姓名:叶志雄学号:160404102472指导老师:文豪职称:讲师中国·珠海二○二○年五月诚信承诺书本人郑重承诺:本人承诺呈交的毕业设计《智能物料机器人—机器人移动平台的设计》是在指导教师的指导下,独立开展研究取得的成果,文中引用他人的观点和材料,均在文后按顺序列出其参考文献,设计使用的数据真实可靠。本人签名:日期:年月日智能物料机器人—机器人移动平台的设计摘要尤其在工业生产正处于风口位置

智能物料机器人-移动平台的开发设计.docx
北京理工大学珠海学院2020届本科毕业生设计智能物料机器人—机器人移动平台的设计学院:工业自动化学院专业:机械电子工程姓名:叶志雄学号:160404102472指导老师:文豪职称:讲师中国·珠海二○二○年五月诚信承诺书本人郑重承诺:本人承诺呈交的毕业设计《智能物料机器人—机器人

一种基于移动平台的共享单车智能管理机器人.pdf
本发明公开了一种基于移动平台的共享单车智能管理机器人,包括:移动平台、抓取装置、传感器套件和MCU处理器。本发明的有益效果为:智能管理机器人能够自动搬移自行车,自动化程度高,易管理;采用双叉臂独立悬架和麦克纳姆轮的移动平台承载能力高,可灵活地全方位移动;减少公共资源的浪费,使共享单车能够得到最大化的利用;能够有效解决共享单车乱停放问题。

面向智能移动机器人的ADAM平台及应用的任务书.docx
面向智能移动机器人的ADAM平台及应用的任务书任务书一、任务简介智能移动机器人已经成为物流、制造、服务等各行各业的重要助手,带来效率提升、成本降低和工作环境改善等多方面的优势。为了更好地支持机器人的开发和应用,我们需要一种高效的平台——ADAM,来完成机器人的建模、部署、控制、监测、分析等工作,并将其应用于物流、制造、服务等多个领域。本任务的目标是设计和实现面向智能移动机器人的ADAM平台,并开发一些典型的应用,以验证ADAM的功能和性能。具体而言,本任务包括以下两个部分:(1)ADAM平台开发:该部分主