
基于图像引导的穿刺手术机器人导航系统研究的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

基于图像引导的穿刺手术机器人导航系统研究的开题报告.docx
基于图像引导的穿刺手术机器人导航系统研究的开题报告一、研究背景和意义随着医疗技术的不断发展,机器人手术已成为一种越来越普遍的医疗手段。机器人手术可以减少手术创伤,提高手术精度,缩短患者恢复时间,是目前公认的比传统手术更为安全且更有效的方法之一。然而,机器人手术也存在一些问题,如手术时间较长、成本较高、需要有经验的手术医生进行操作等。针对这些问题,可以采用基于图像引导的穿刺手术机器人导航系统,实现手术的自动化,提高手术的安全性和有效性,减少人为错误的发生。二、研究内容和方法本研究的主要内容为基于图像引导的穿

基于图像引导的穿刺手术机器人导航系统研究的任务书.docx
基于图像引导的穿刺手术机器人导航系统研究的任务书任务书一、任务背景随着医疗技术的不断发展,机器人技术的应用已经成为医疗领域一个热门的研究方向。在穿刺手术中,机器人技术的应用能够提高手术的准确性和安全性。然而,在穿刺手术中,需要精确的定位和导航,这对于人的手动操作来说是非常困难的。因此,研究一套基于图像引导的穿刺手术机器人导航系统变得非常重要。二、研究内容本研究的主要内容是设计和开发一套基于图像引导的穿刺手术机器人导航系统。该系统将结合机器人技术和图像处理技术,可以在手术中实现精确定位和准确导航。1.研究图

基于CT或MRI图像导航的胸腔穿刺手术机器人.pdf
本发明公开了一种基于CT或MRI图像导航的胸腔穿刺手术机器人,包括弧形支架模块、三向平移模块和角度调整模块;弧形支架模块通过内啮配合齿轮的传动实现穿刺头在人体胸腔外部的位置调整,通过离合机构实现自锁;三向平移模块由三组螺旋传动机构组成,以此完成穿刺位置的调整;角度调整模块可实现三个自由度,分别是进针倾向自由度、进针角度自由度和进针运动自由度。本发明能够使机械臂从胸腔外部任意位置和任意角度进针,并且机器人的运动能够进行自动调整,定位精度高,速度快。
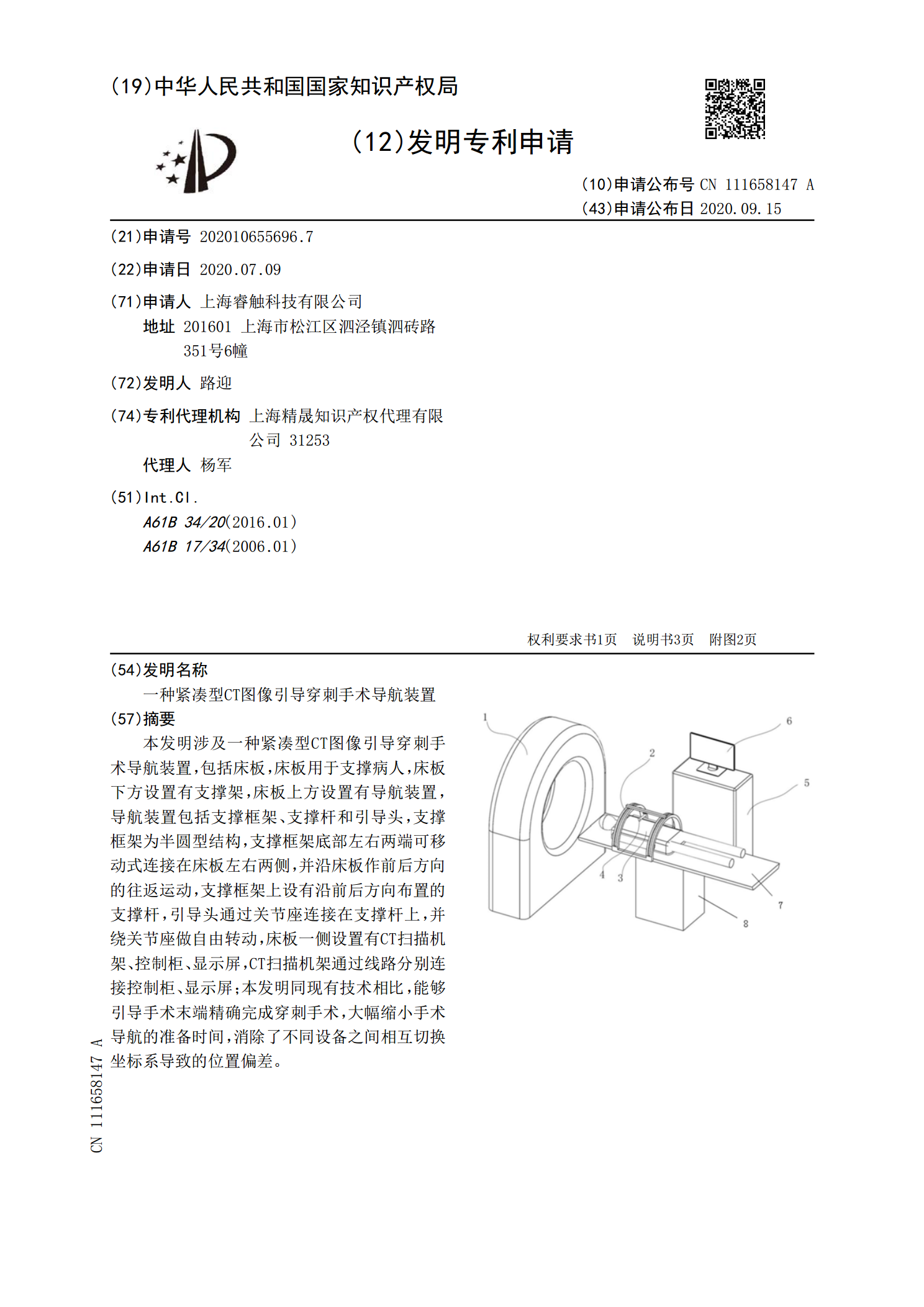
一种紧凑型CT图像引导穿刺手术导航装置.pdf
本发明涉及一种紧凑型CT图像引导穿刺手术导航装置,包括床板,床板用于支撑病人,床板下方设置有支撑架,床板上方设置有导航装置,导航装置包括支撑框架、支撑杆和引导头,支撑框架为半圆型结构,支撑框架底部左右两端可移动式连接在床板左右两侧,并沿床板作前后方向的往返运动,支撑框架上设有沿前后方向布置的支撑杆,引导头通过关节座连接在支撑杆上,并绕关节座做自由转动,床板一侧设置有CT扫描机架、控制柜、显示屏,CT扫描机架通过线路分别连接控制柜、显示屏;本发明同现有技术相比,能够引导手术末端精确完成穿刺手术,大幅缩小手术

基于ROS的机器人定位与导航系统研究的开题报告.docx
基于ROS的机器人定位与导航系统研究的开题报告一、选题背景与意义随着机器人技术的飞速发展,机器人制造成本的降低和智能化程度的提高,机器人在各个领域得到广泛应用。机器人的交互式任务需要有可靠的定位和导航系统,以便在复杂环境中移动和执行任务。本项目将研究基于ROS(RobotOperatingSystem)的机器人定位和导航系统。机器人定位和导航系统是一个复杂的多层次问题,需要考虑传感器、运动估计、地图构建、路径规划等多个方面。采用ROS作为机器人软件框架可以方便地进行自主控制和智能感知的研究和应用。本项目旨