
一种RV减速器摆线针轮承载啮合印痕确定方法及装置.pdf

猫巷****熙柔


1/10

2/10
3/10

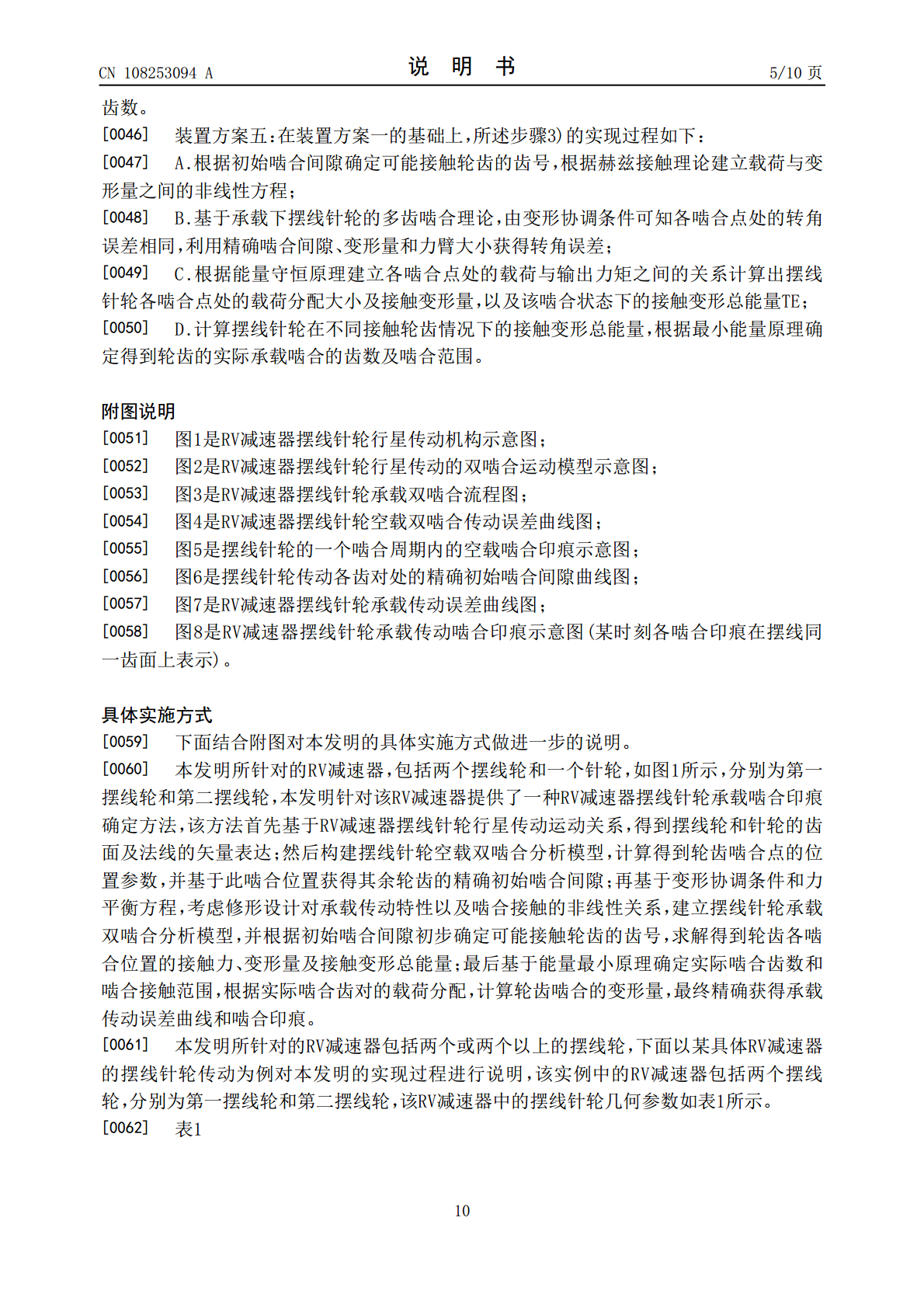
4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种RV减速器摆线针轮承载啮合印痕确定方法及装置.pdf
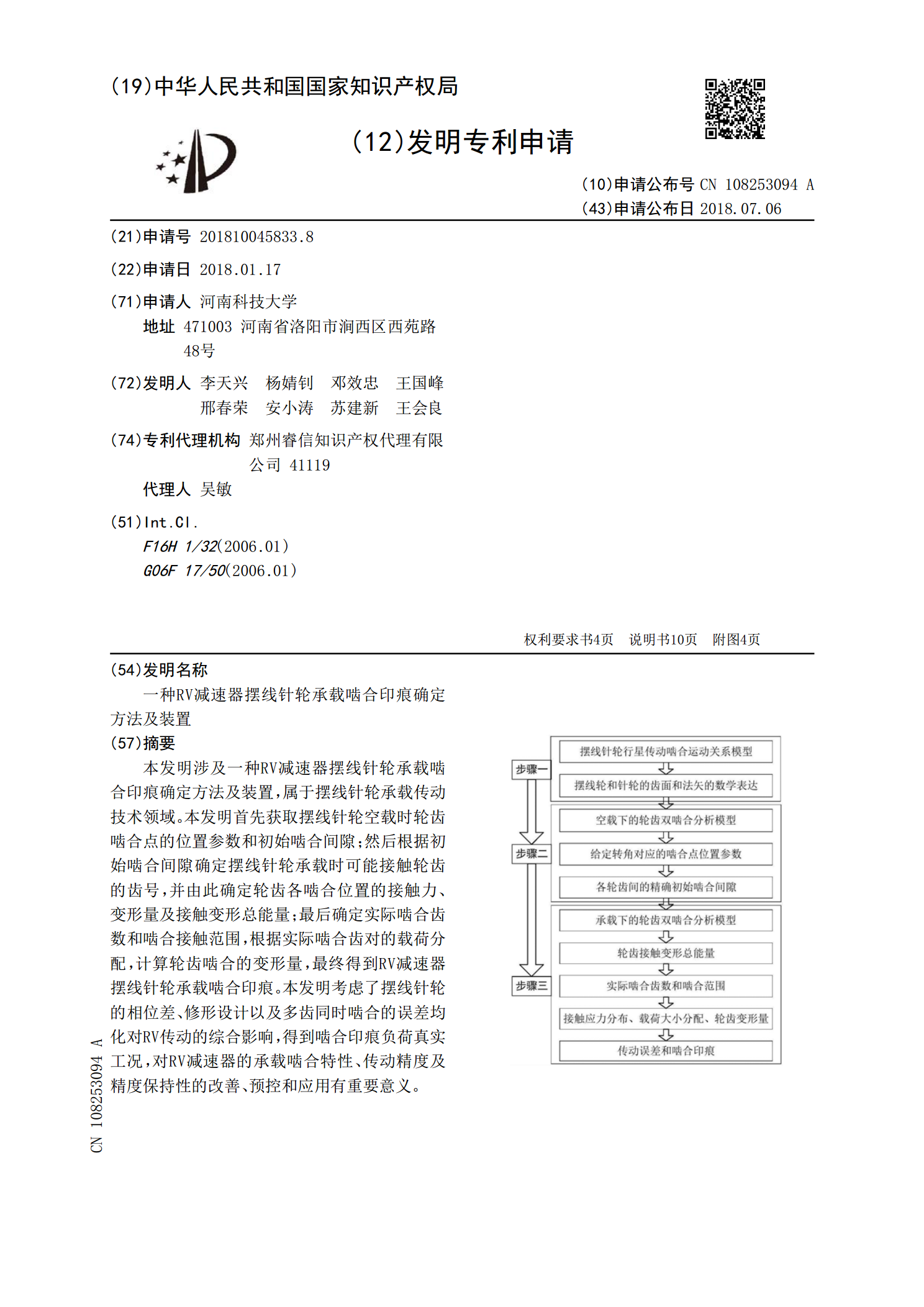
本发明涉及一种RV减速器摆线针轮承载啮合印痕确定方法及装置,属于摆线针轮承载传动技术领域。本发明首先获取摆线针轮空载时轮齿啮合点的位置参数和初始啮合间隙;然后根据初始啮合间隙确定摆线针轮承载时可能接触轮齿的齿号,并由此确定轮齿各啮合位置的接触力、变形量及接触变形总能量;最后确定实际啮合齿数和啮合接触范围,根据实际啮合齿对的载荷分配,计算轮齿啮合的变形量,最终得到RV减速器摆线针轮承载啮合印痕。本发明考虑了摆线针轮的相位差、修形设计以及多齿同时啮合的误差均化对RV传动的综合影响,得到啮合印痕负荷真实工况,对

RV减速器摆线针轮传动部分啮合仿真分析.docx
RV减速器摆线针轮传动部分啮合仿真分析摘要:RV减速器是一种常见的重要传动装置,其摆线针轮传动部分是实现减速和传动的关键部件。本论文通过仿真分析,探讨了RV减速器摆线针轮传动部分的啮合行为,分析了其传动性能和优化方法,为RV减速器设计和优化提供了理论依据和指导。关键词:RV减速器;摆线针轮传动;啮合;仿真分析;传动性能;优化方法1.引言RV减速器是一种广泛应用于机械传动系统中的减速装置,具有结构简单、体积小、传动精度高等优点,被广泛应用于机床、工业机械、自动化设备等领域。其中,摆线针轮传动是RV减速器的核

RV减速器摆线针轮啮合间隙影响因素的分析.docx
RV减速器摆线针轮啮合间隙影响因素的分析摘要随着机械设备的发展,减速器在传动系统中扮演着重要的角色。而摆线针轮减速器作为一种新型的减速机构,由于其高传动精度、高效率和紧凑的结构,在工业自动化领域得到广泛应用。然而,摆线针轮减速器在工作过程中存在一些问题,如啮合间隙的影响,这会导致传动精度下降、噪声增加等问题。本文通过对摆线针轮减速器啮合间隙影响因素的分析,探讨了如何优化减速器的设计与制造,以改善其工作性能。1.引言减速器是一种用于降低输入轴的转速和增加输出轴的扭矩的传动装置。摆线针轮减速器由摆线齿轮和蜗轮

RV减速器摆线针轮啮合副机构特性研究的中期报告.docx
RV减速器摆线针轮啮合副机构特性研究的中期报告本文是一份关于RV减速器摆线针轮啮合副机构特性研究的中期报告,旨在总结目前的研究进展和结论,以及为后续的实验和研究提供指导方案。本报告涵盖了对RV减速器摆线针轮啮合副机构特性的分析和研究,包括理论分析、实验测试、仿真模拟等多个方面的内容。一、研究背景RV减速器是一种新型高精度精密传动装置,主要由内外壳体、摆线针轮及其啮合副组成。摆线针轮啮合副是RV减速器最核心的组成部分,其运动和性能对于整个减速器的正常运转以及精度的稳定性有着至关重要的作用。因此,对摆线针轮啮

RV减速器摆线针轮啮合副机构特性研究的开题报告.docx
RV减速器摆线针轮啮合副机构特性研究的开题报告一、研究背景机械传动减速副是各行业中广泛应用的一种装置,而摆线针轮啮合减速器是其中的一种,它具有结构紧凑、传动效率高、精度高等特点,因此在机械设计中得到了广泛的应用。而在摆线针轮啮合减速器中,机构特性的研究对于其性能优化和设计具有重要的意义。二、问题阐述在摆线针轮啮合减速器中,机构特性是指在特定工况下减速器的传动效率、传动精度、噪声和寿命等参数的变化规律。因此该研究主要探讨以下问题:1.摆线针轮啮合减速器的基本结构和工作原理;2.针轮和摆线轮的啮合原理,传动效