
一种抽水蓄能机组开机规律的双目标优选方法及系统.pdf

一只****呀淑

1/10

2/10
3/10
4/10

5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种抽水蓄能机组开机规律的双目标优选方法及系统.pdf
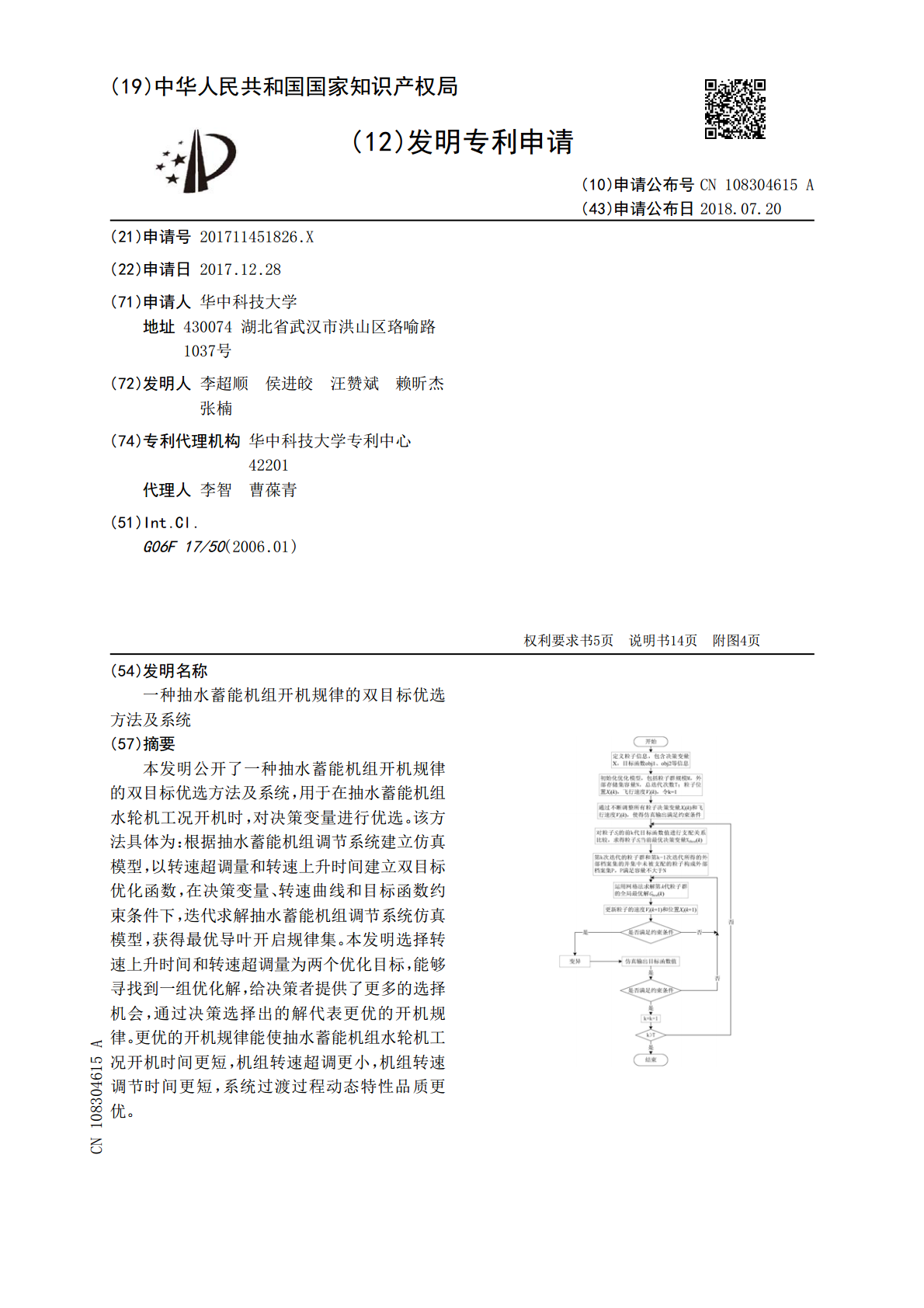
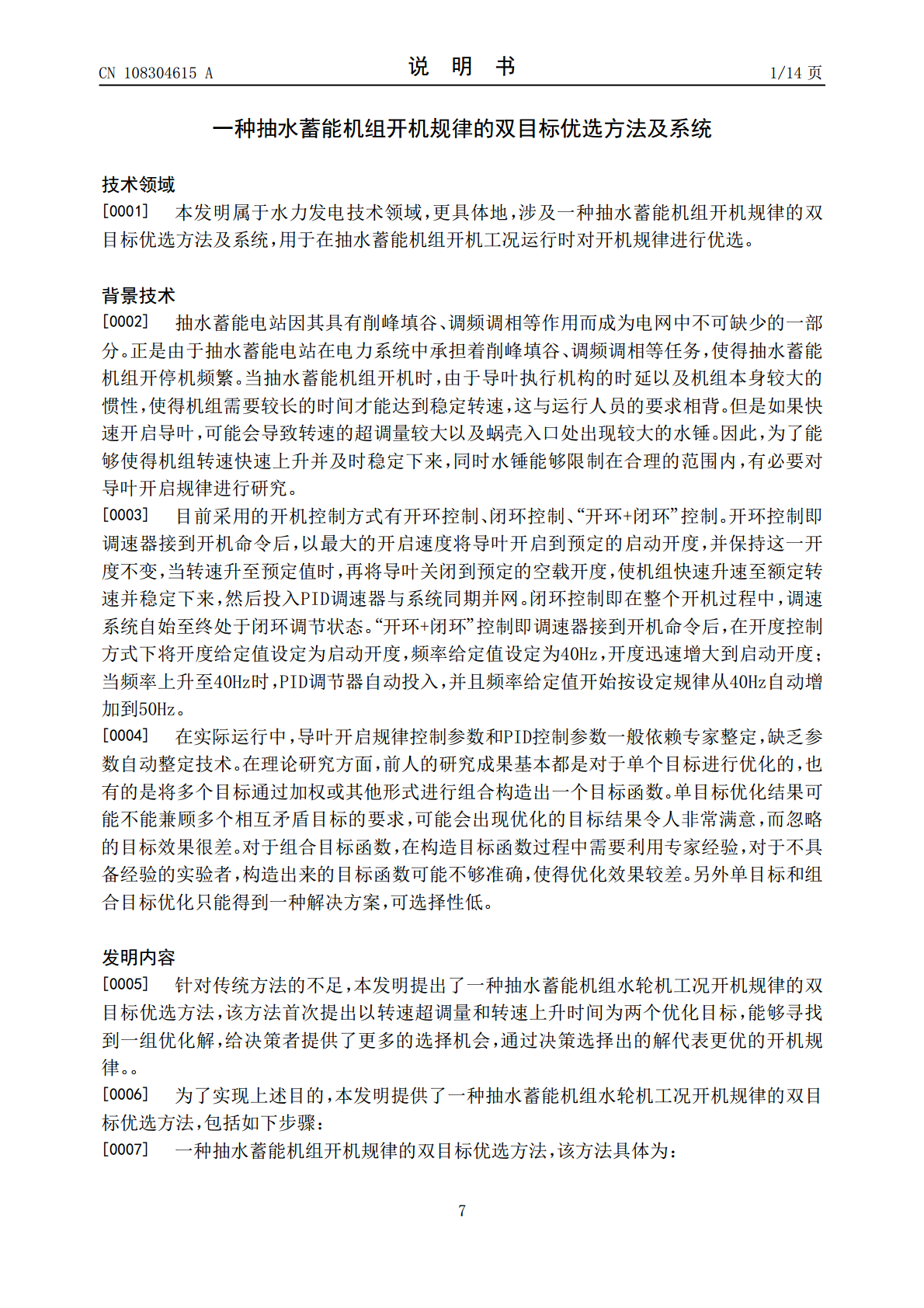
本发明公开了一种抽水蓄能机组开机规律的双目标优选方法及系统,用于在抽水蓄能机组水轮机工况开机时,对决策变量进行优选。该方法具体为:根据抽水蓄能机组调节系统建立仿真模型,以转速超调量和转速上升时间建立双目标优化函数,在决策变量、转速曲线和目标函数约束条件下,迭代求解抽水蓄能机组调节系统仿真模型,获得最优导叶开启规律集。本发明选择转速上升时间和转速超调量为两个优化目标,能够寻找到一组优化解,给决策者提供了更多的选择机会,通过决策选择出的解代表更优的开机规律。更优的开机规律能使抽水蓄能机组水轮机工况开机时间更短
一种抽水蓄能机组水轮机工况智能开机方法.pdf
本发明公开了一种抽水蓄能机组水轮机工况智能开机方法,包括:(1)建立抽水蓄能机组的水泵水轮机调节系统仿真模型;(2)在水泵水轮机调节系统仿真模型中设置三个阶段开机控制原则;(3)根据三个阶段开机控制原则,并采用离散形式时间乘误差绝对值积分指标作为控制参数优化的目标函数来建立开机过程控制参数优化目标函数;(4)运用启发式优化方法求解所述开机过程控制参数优化目标函数,并获得最优控制参数。本发明优选出控制参数,并应用到仿真计算后,显著提升不同水头下抽水蓄能机组水轮机工况开机品质,缩短开机时间、减小超调量和减少转
含双馈型抽水蓄能机组系统频率控制方法、设备及介质.pdf
本发明涉及电力系统频率控制领域,尤其涉及一种含双馈型抽水蓄能机组系统频率控制方法、设备及介质,方法包括:基于双馈型抽水蓄能机组在不同工况下的运行控制特性,分别构建机组频率控制模型;构建含有常规火电机组以及双馈型抽水蓄能机组的单区域系统负荷频率控制模型;构建单区域系统的负荷频率控制器,并定义状态空间和动作空间,与机组频率控制模型进行交互,确定以最小化系统频率偏差及调频出力为优化目标的奖励函数;引入随机的系统内部参数变化与外部功率扰动进行试错探索,训练负荷频率控制器在不同场景下,可根据系统状态确定符合优化目标
一种抽水蓄能机组过水系统的建模方法.pdf
本发明公开了一种抽水蓄能机组过水系统的建模方法,利用电路等效法建立抽水蓄能机组的有压管道模型、调压室模型和水泵水轮机模型;根据上述模型形成抽水蓄能机组过水系统等效电路模型;并根据多维基尔霍夫电压和电流定理,建立过水系统的等效电路网络的常微分矩阵方程;本发明提出的建模方法,通过基于电路等效法的抽水蓄能机组调节系统数学模型仿真方法进行了验证,验证结果表明所建立的抽水蓄能机组过水系统模型可更大程度地满足水电能源系统仿真和电力系统分析的精细化建模要求。
一种抽水蓄能机组调节系统鲁棒辨识方法.pdf
本发明公开了一种抽水蓄能机组调节系统鲁棒辨识方法,包括以下步骤:(1)获取抽水蓄能机组调节系统运行数据,将原始数据规范至[0,1]区间并划分为训练集和测试集,确定离群鲁棒极限学习机的输入变量;(2)建立离群鲁棒极限学习机模型,并用训练集对其进行训练;(3)采用拉丁超立方和模拟退火算法改进原子搜索算法,并采用改进原子搜索算法优化ORELM模型的权重和偏置;(4)利用训练好的ORELM模型和测试集得到预测值,反归一化后即可得到最终输出。本发明能够被应用于抽水蓄能机组调节系统建模过程中,所提鲁棒辨识方法显著提高