
自动驾驶汽车的泊车辅助系统.pdf

思洁****爱吗


1/9
2/9
3/9
4/9
5/9

6/9

7/9
8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
自动驾驶汽车的泊车辅助系统.pdf
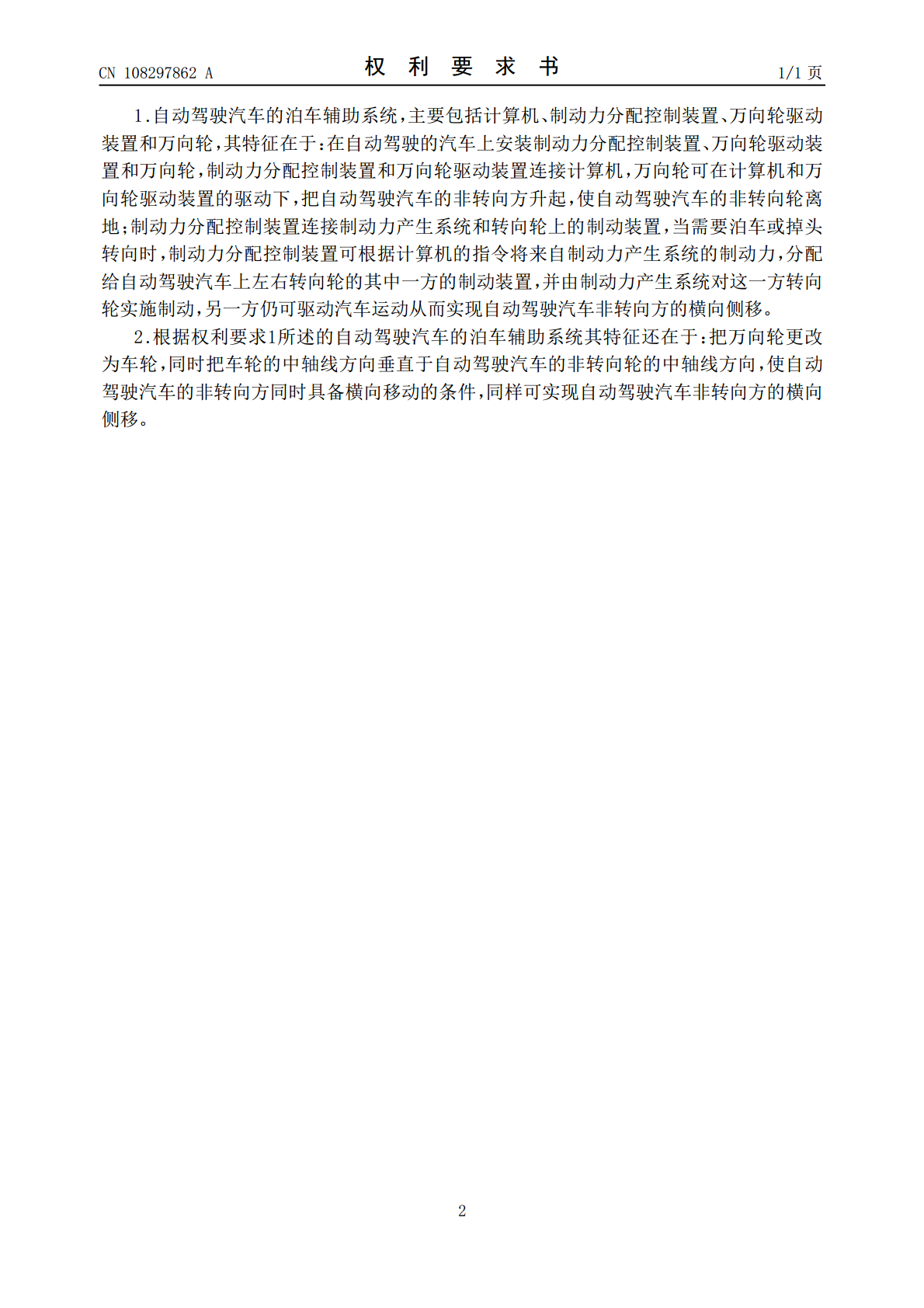
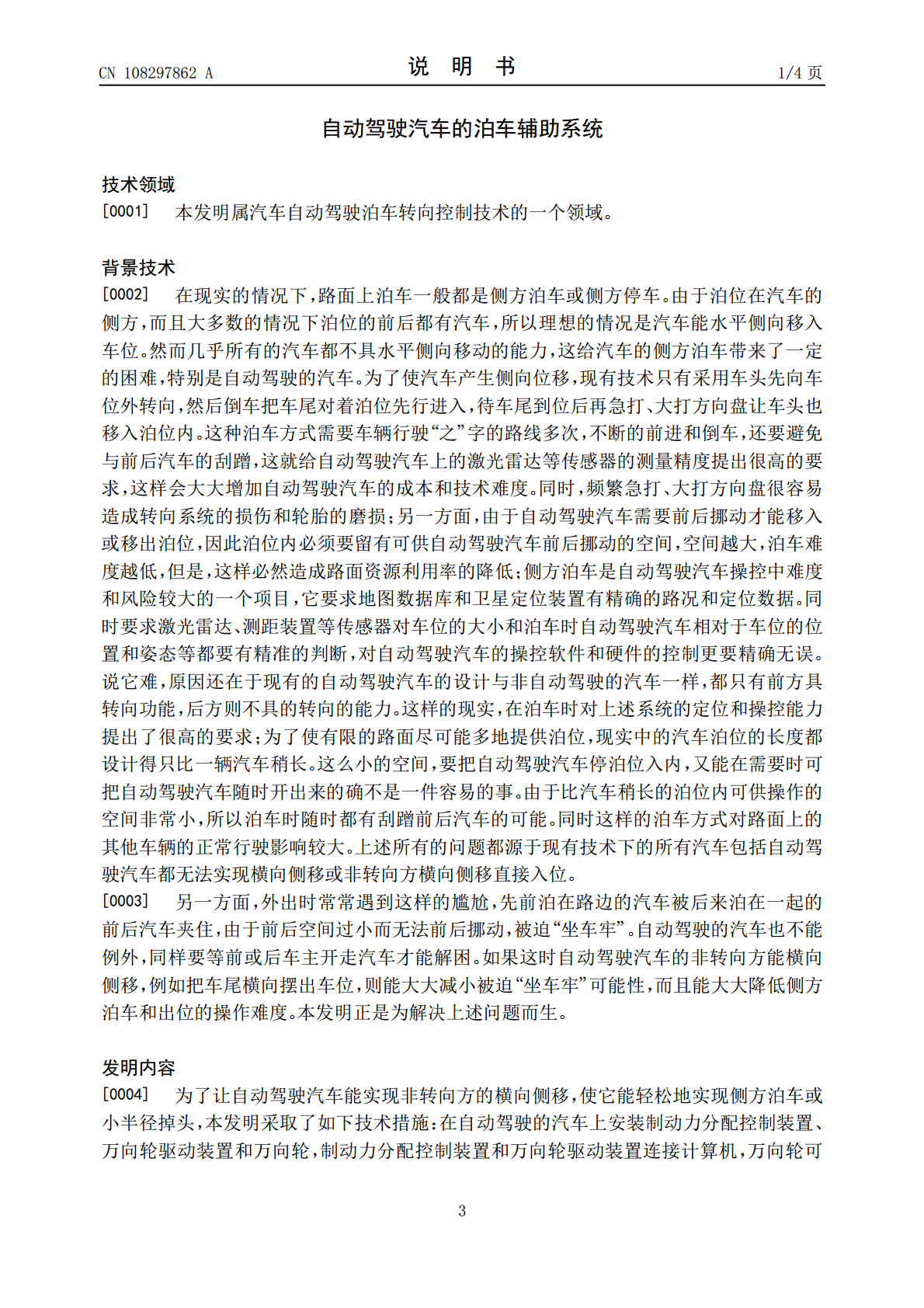
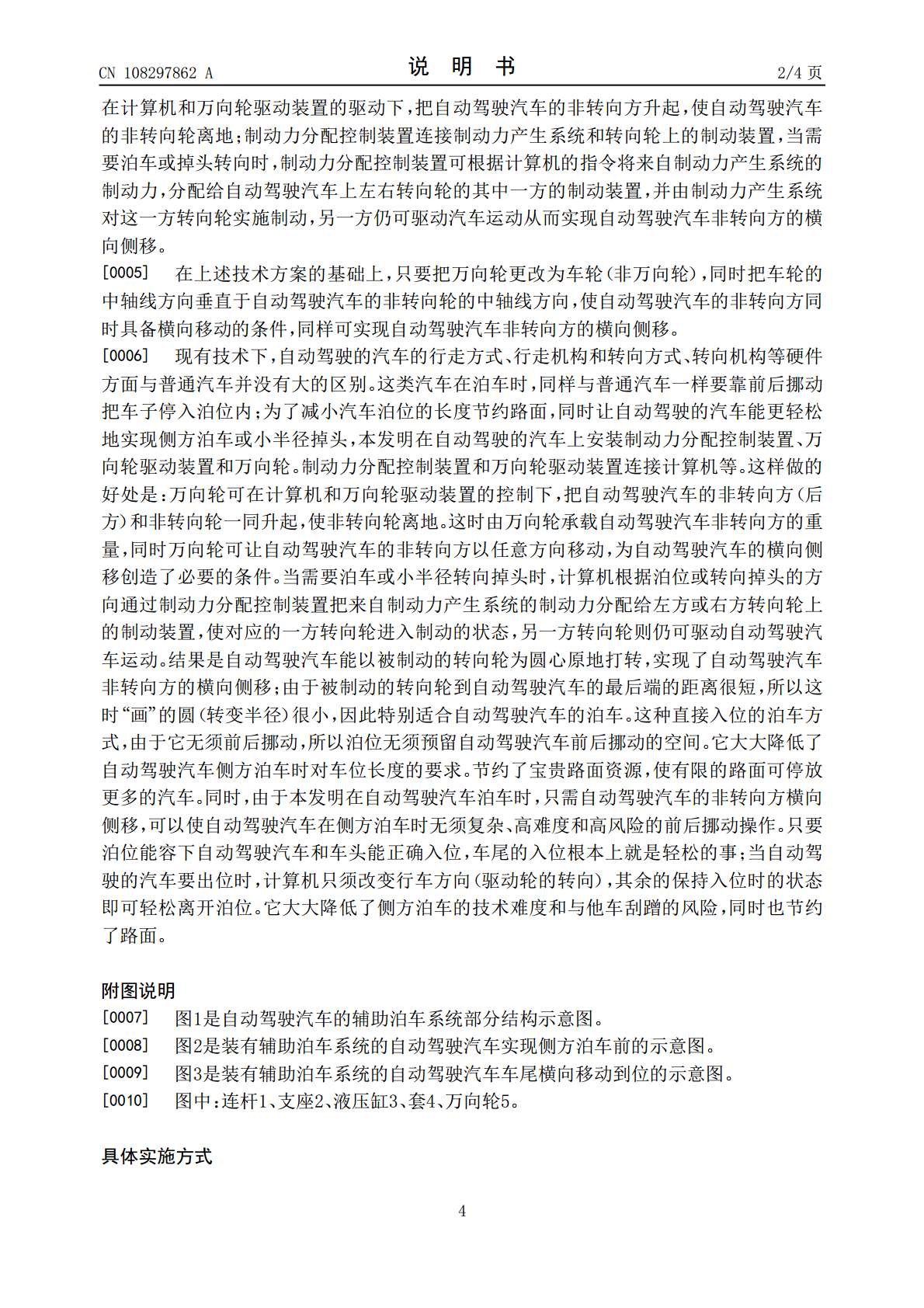
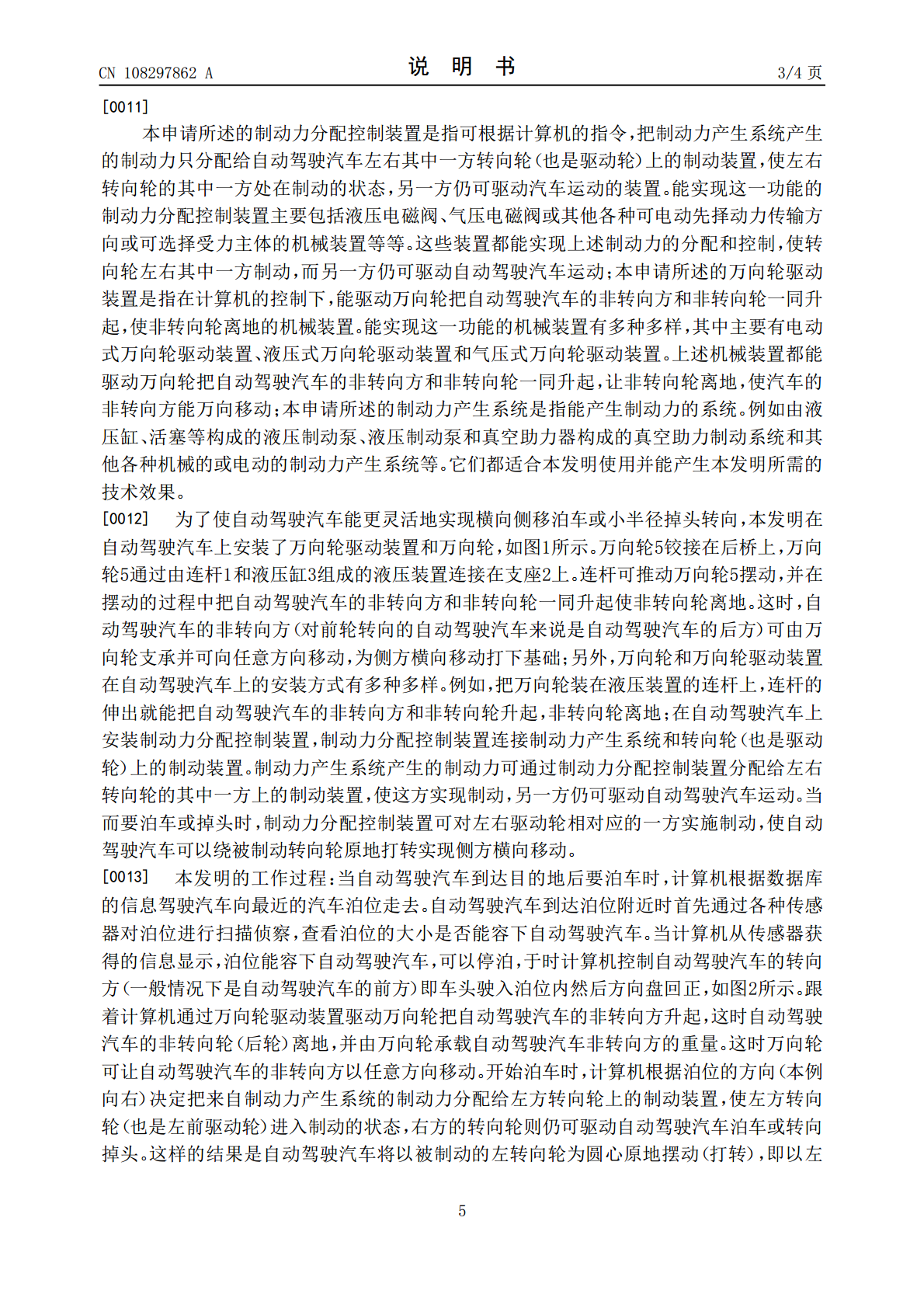
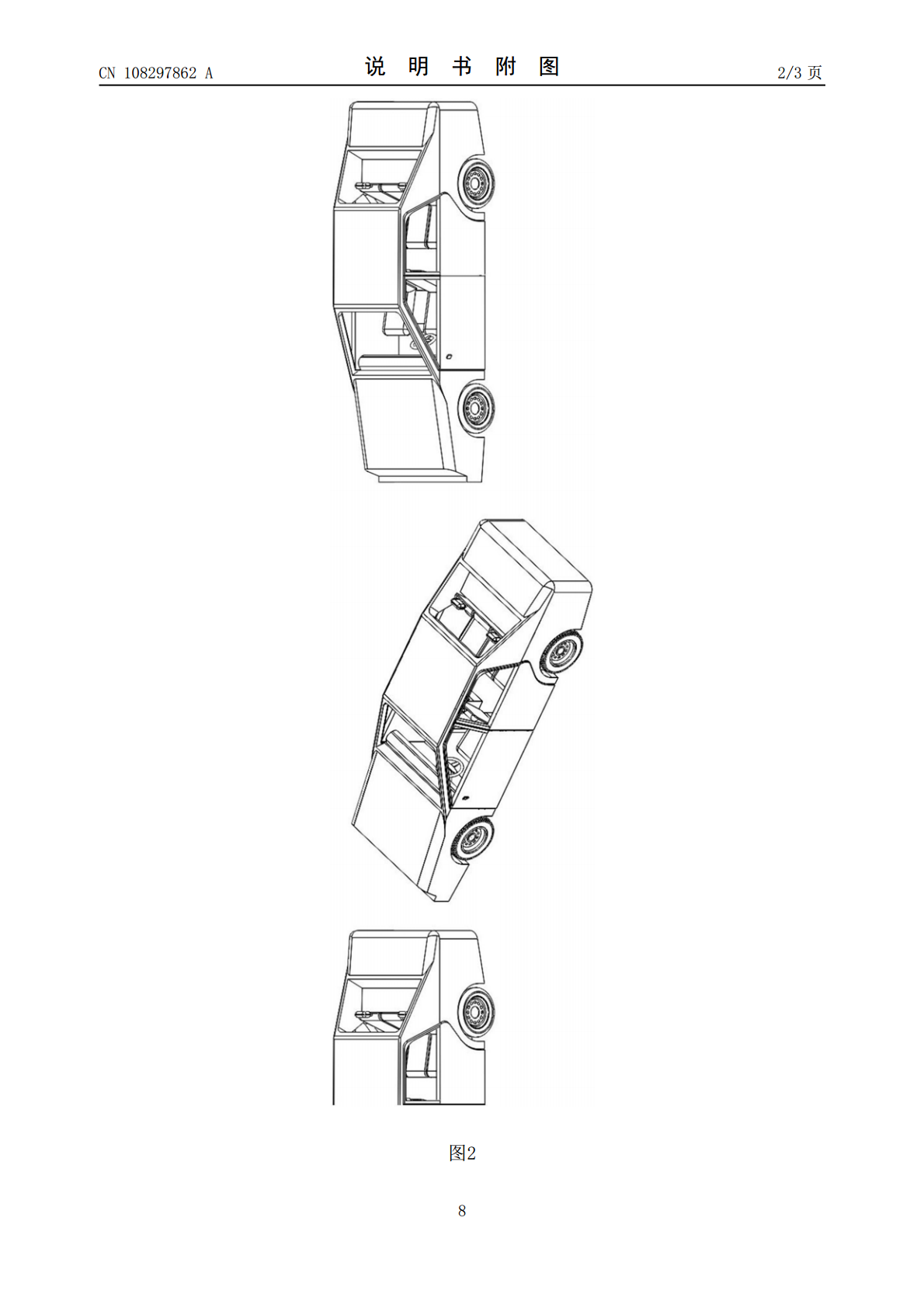
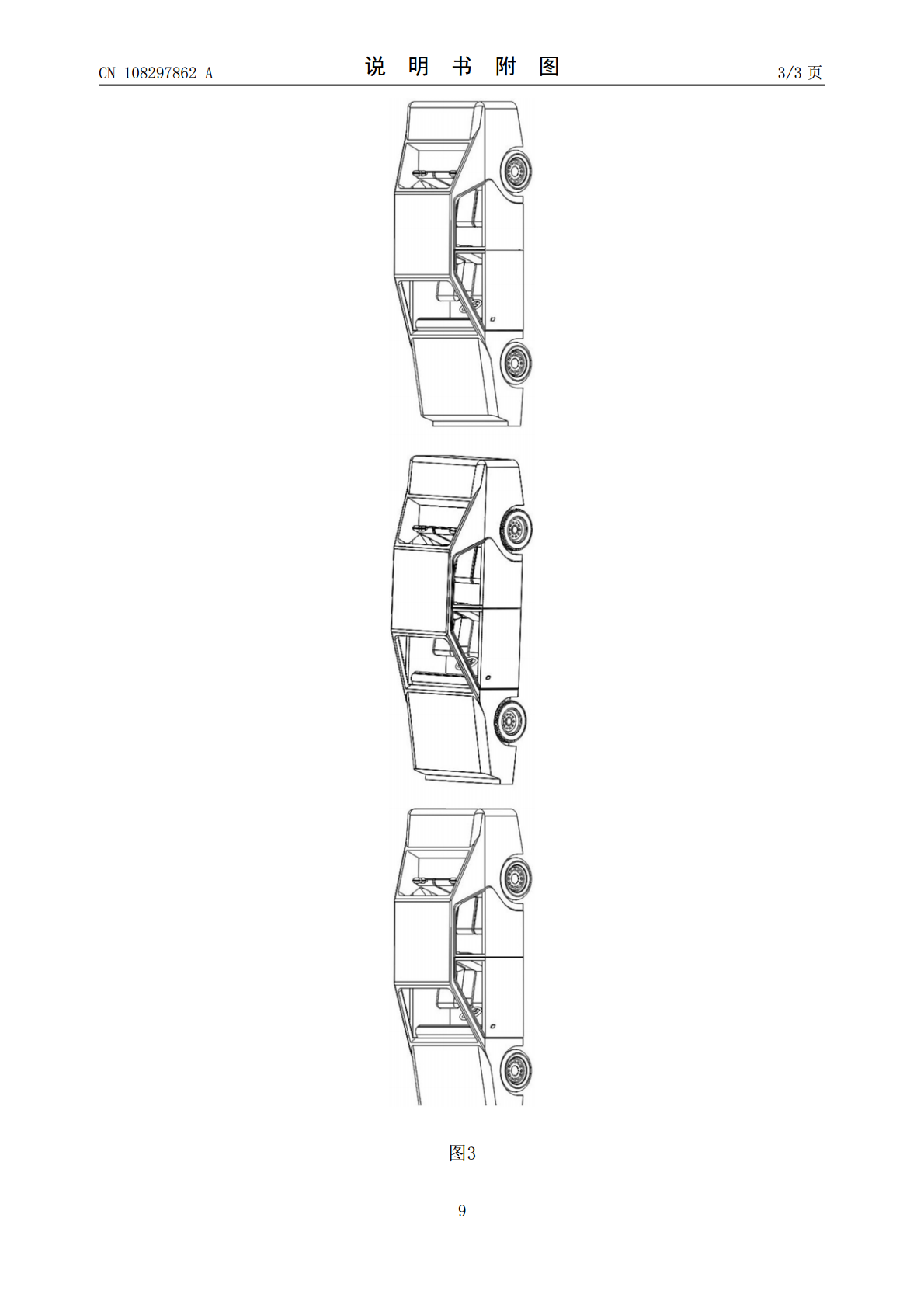
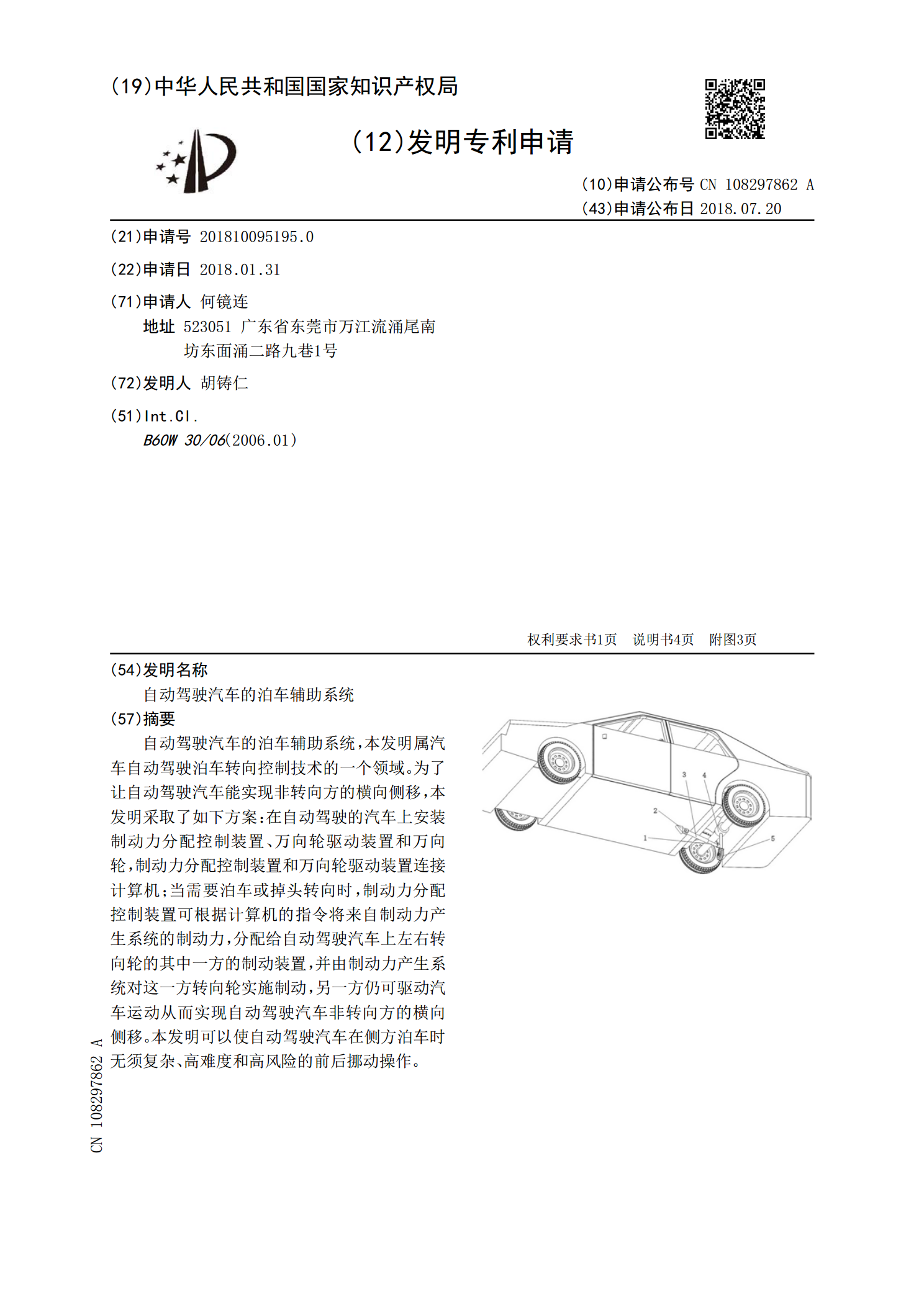
自动驾驶汽车的泊车辅助系统,本发明属汽车自动驾驶泊车转向控制技术的一个领域。为了让自动驾驶汽车能实现非转向方的横向侧移,本发明采取了如下方案:在自动驾驶的汽车上安装制动力分配控制装置、万向轮驱动装置和万向轮,制动力分配控制装置和万向轮驱动装置连接计算机;当需要泊车或掉头转向时,制动力分配控制装置可根据计算机的指令将来自制动力产生系统的制动力,分配给自动驾驶汽车上左右转向轮的其中一方的制动装置,并由制动力产生系统对这一方转向轮实施制动,另一方仍可驱动汽车运动从而实现自动驾驶汽车非转向方的横向侧移。本发明可以

汽车泊车辅助系统的设计论文.doc
IV密级公开学号衡水学院毕业论文(设计)汽车泊车辅助系统的设计论文作者:指导教师:系别::物理与电子信息系专业电子信息工程年级:2013级提交日期:2017年4月18日答辩日期:2017年5月05日毕业论文(设计)学术承诺本人郑重承诺:所呈交的毕业论文(设计)是本人在导师指导下进行的研究工作及取得的研究成果。除了文中特别加以标注和致谢的地方外,论文(设计)中不存在抄袭情况,论文(设计)中不包含其他人已经发表的研究成果,也不包含他人或其他教学机构取得的研究成果。作者签名:日期:毕业论文(设计)使用授权的说明

汽车泊车辅助系统的设计论文.doc
IV密级公开学号衡水学院毕业论文(设计)汽车泊车辅助系统的设计论文作者:指导教师:系别::物理与电子信息系专业电子信息工程年级:2013级提交日期:2017年4月18日答辩日期:2017年5月05日毕业论文(设计)学术承诺本人郑重承诺:所呈交的毕业论文(设计)是本人在导师指导下进行的研究工作及取得的研究成果。除了文中特别加以标注和致谢的地方外,论文(设计)中不存在抄袭情况,论文(设计)中不包含其他人已经发表的研究成果,也不包含他人或其他教学机构取得的研究成果。作者签名:日期:毕业论文(设计)使用授权的说明

汽车泊车辅助系统的设计论文.doc
IV密级公开学号衡水学院毕业论文(设计)汽车泊车辅助系统的设计论文作者:指导教师:系别::物理与电子信息系专业电子信息工程年级:2013级提交日期:2017年4月18日答辩日期:2017年5月05日毕业论文(设计)学术承诺本人郑重承诺:所呈交的毕业论文(设计)是本人在导师指导下进行的研究工作及取得的研究成果。除了文中特别加以标注和致谢的地方外,论文(设计)中不存在抄袭情况,论文(设计)中不包含其他人已经发表的研究成果,也不包含他人或其他教学机构取得的研究成果。作者签名:日期:毕业论文(设计)使用授权的说明
汽车泊车辅助系统的设计论文.doc
IV密级公开学号衡水学院毕业论文(设计)汽车泊车辅助系统的设计论文作者:指导教师:系别::物理与电子信息系专业电子信息工程年级:2013级提交日期:2017年4月18日答辩日期:2017年5月05日毕业论文(设计)学术承诺本人郑重承诺:所呈交的毕业论文(设计)是本人在导师指导下进行的研究工作及取得的研究成果。除了文中特别加以标注和致谢的地方外,论文(设计)中不存在抄袭情况,论文(设计)中不包含其他人已经发表的研究成果,也不包含他人或其他教学机构取得的研究成果。作者签名:日期:毕业论文(设计)使用授权的说明