
一种基于电动调节的基站天线安装支架.pdf

增梅****主啊


1/8
2/8

3/8

4/8

5/8
6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于电动调节的基站天线安装支架.pdf
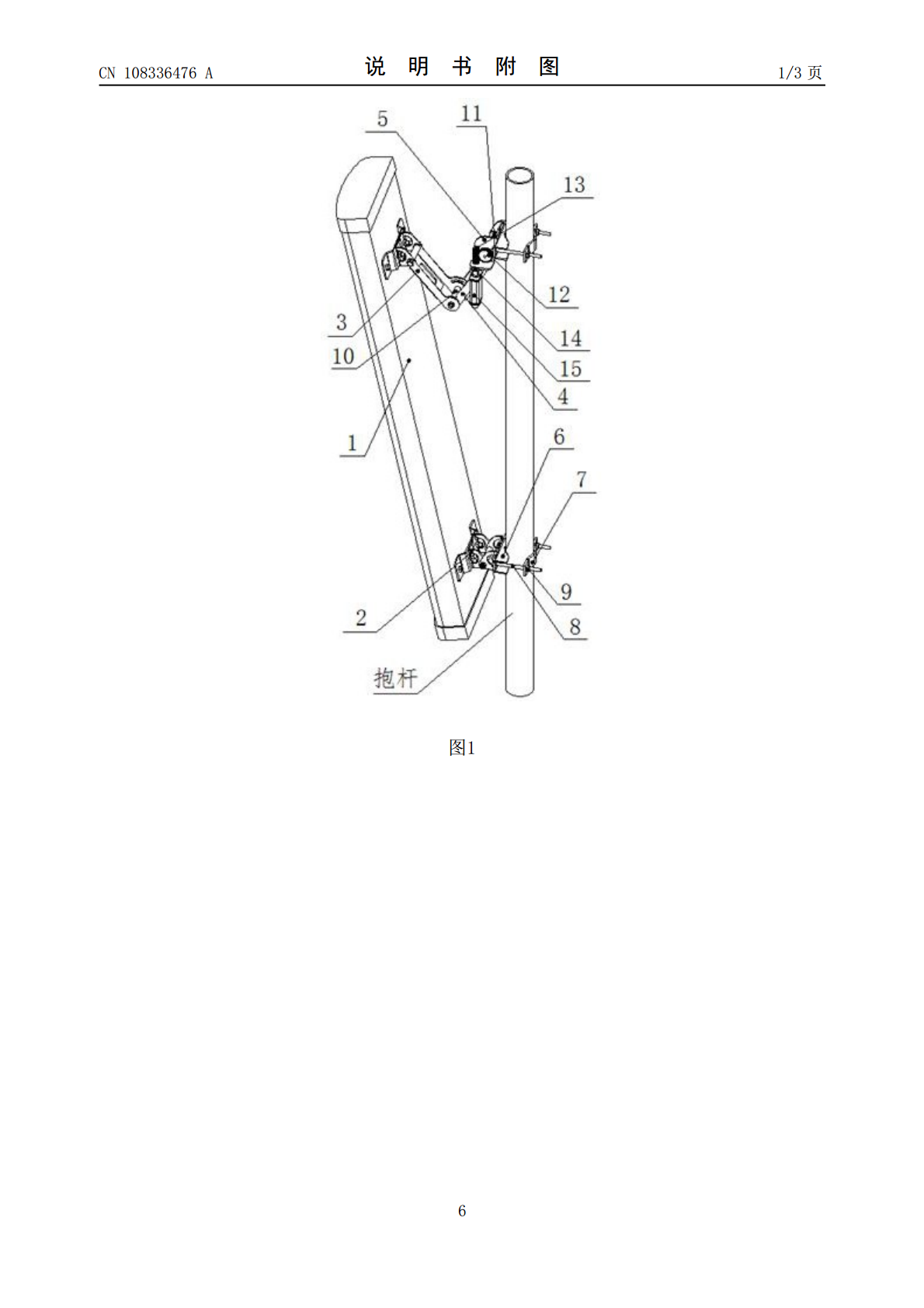
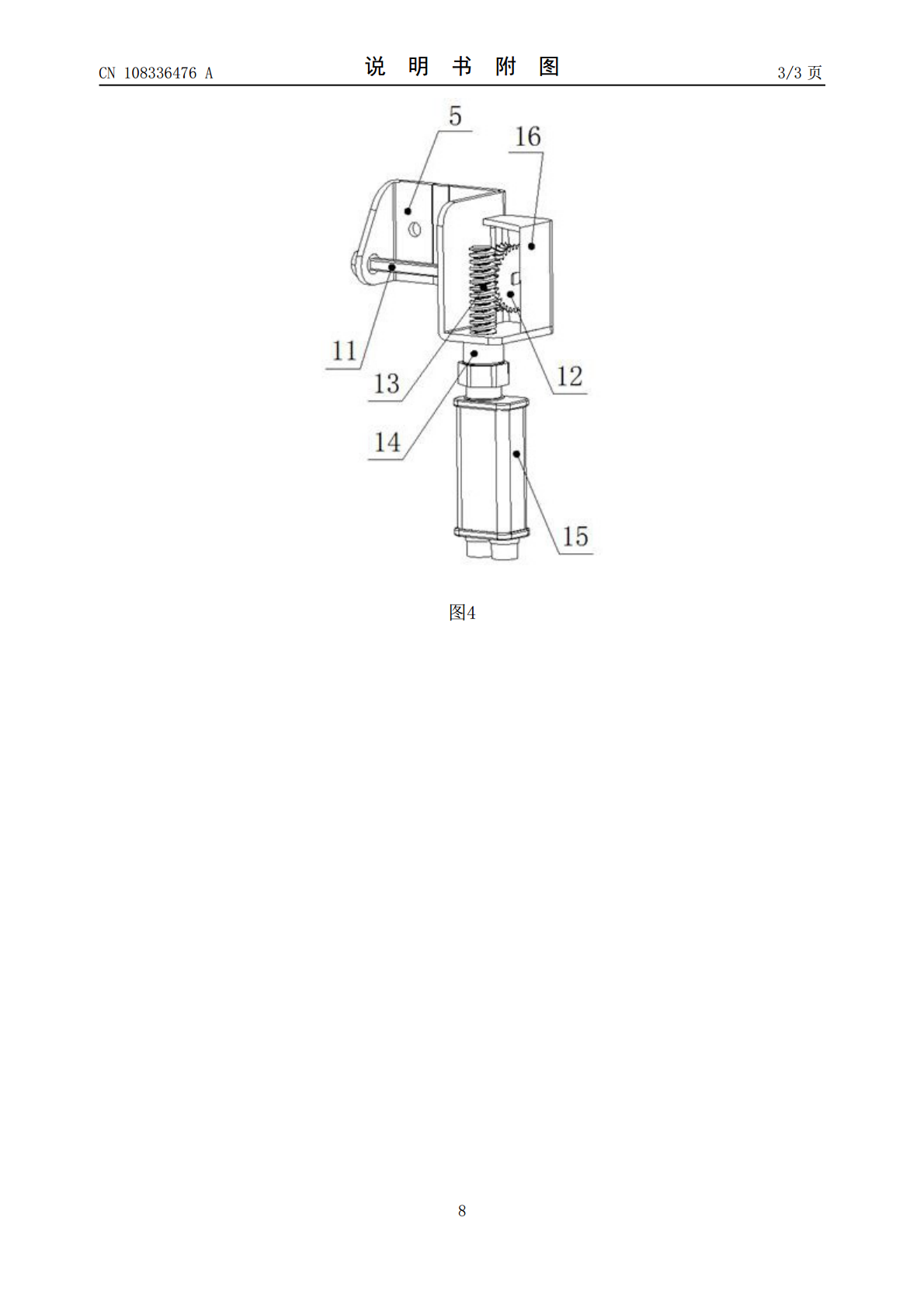
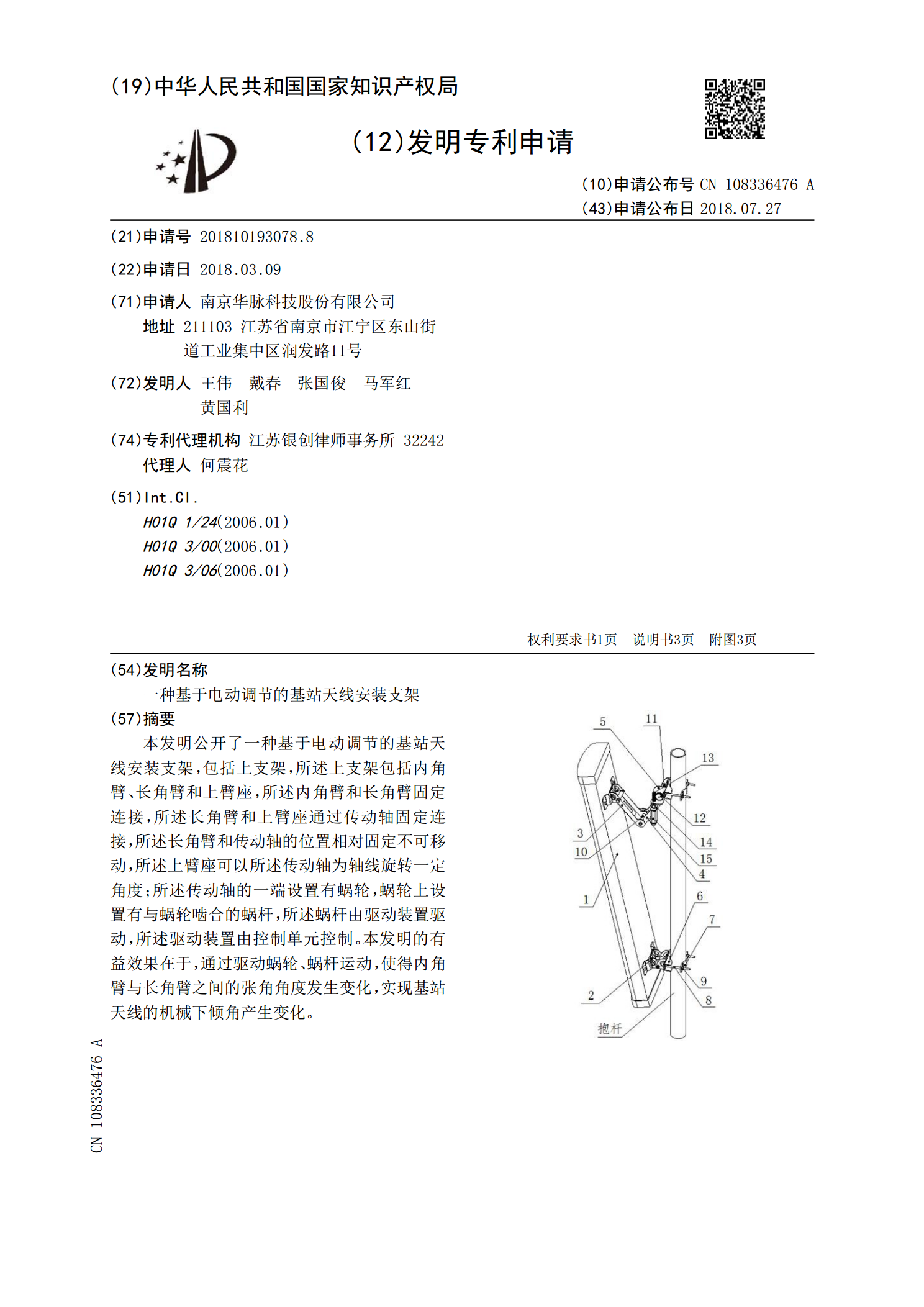
本发明公开了一种基于电动调节的基站天线安装支架,包括上支架,所述上支架包括内角臂、长角臂和上臂座,所述内角臂和长角臂固定连接,所述长角臂和上臂座通过传动轴固定连接,所述长角臂和传动轴的位置相对固定不可移动,所述上臂座可以所述传动轴为轴线旋转一定角度;所述传动轴的一端设置有蜗轮,蜗轮上设置有与蜗轮啮合的蜗杆,所述蜗杆由驱动装置驱动,所述驱动装置由控制单元控制。本发明的有益效果在于,通过驱动蜗轮、蜗杆运动,使得内角臂与长角臂之间的张角角度发生变化,实现基站天线的机械下倾角产生变化。

基站天线支架及基站天线.pdf
本发明提供一种基站天线支架及基站天线,其中基站天线支架包括上支架组件,上支架组件包括第一安装板、转动板以及第一抱箍,转动板的一端转动连接于第一安装板,转动板的另一端转动连接于第一抱箍,其中第一安装板用于与天线本体的顶部连接,第一抱箍用于固定抱杆的顶部,转动板用于调整天线本体与抱杆之间的角度。本发明通过将转动板的两端分别转动连接于第一安装板和第一抱箍,其中第一安装板安装于天线本体的顶部,第一抱箍用于夹持固定抱杆,控制转动板转动,调整天线本体与抱杆之间的位置关系,满足实际需求;该结构简单,包装尺寸小,方便防护
一种用于基站天线的安装支架.pdf
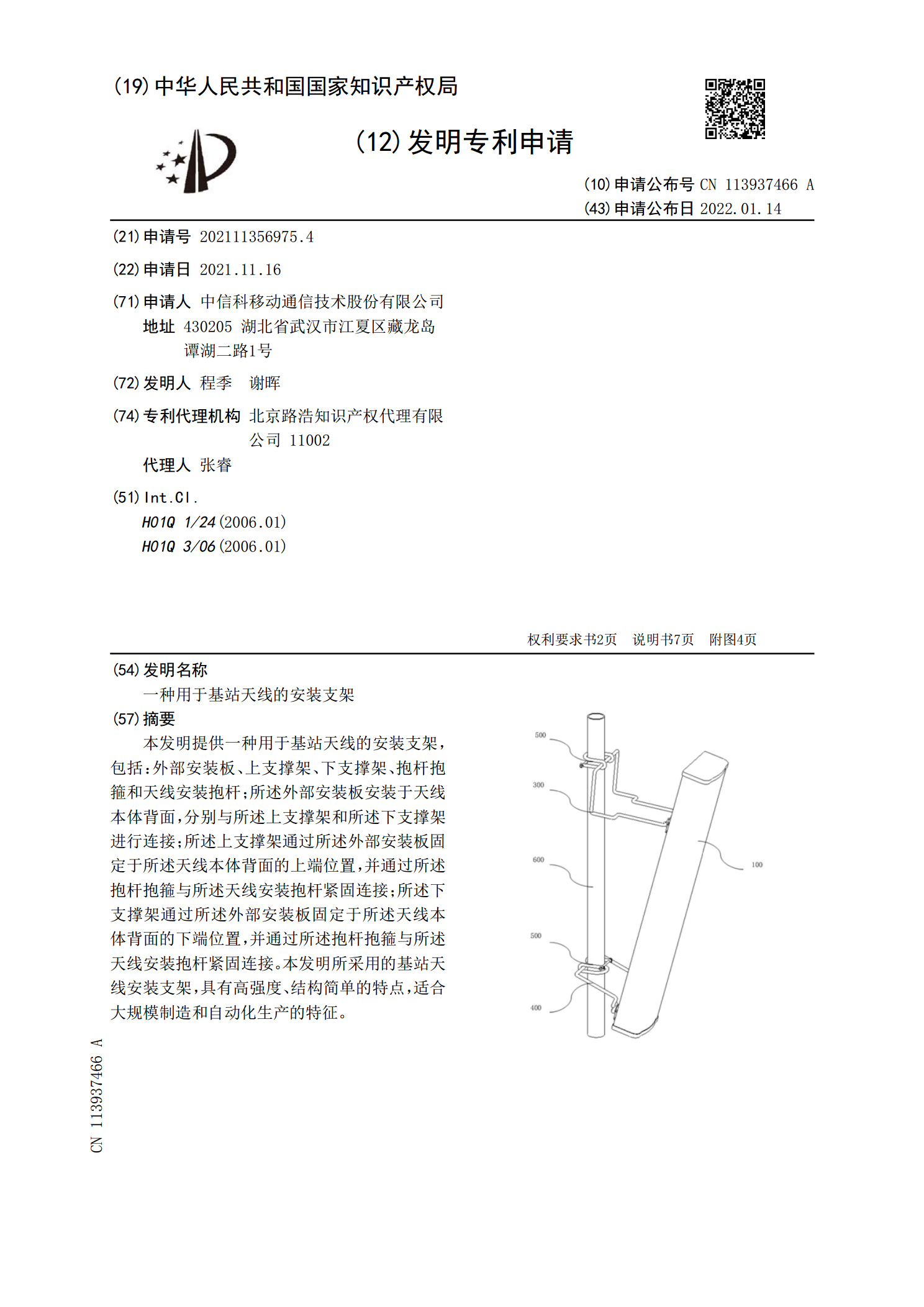
本发明提供一种用于基站天线的安装支架,包括:外部安装板、上支撑架、下支撑架、抱杆抱箍和天线安装抱杆;所述外部安装板安装于天线本体背面,分别与所述上支撑架和所述下支撑架进行连接;所述上支撑架通过所述外部安装板固定于所述天线本体背面的上端位置,并通过所述抱杆抱箍与所述天线安装抱杆紧固连接;所述下支撑架通过所述外部安装板固定于所述天线本体背面的下端位置,并通过所述抱杆抱箍与所述天线安装抱杆紧固连接。本发明所采用的基站天线安装支架,具有高强度、结构简单的特点,适合大规模制造和自动化生产的特征。

一种可调节天线角度的天线支架.pdf
本发明公开了一种可调节天线角度的天线支架,包括安装座、顶盘、调节结构、天线本体、支撑柱和插接柱,所述安装座呈圆盘状,卡接槽的内侧边上对称开设有四个紧固孔,所述调节结构包括调节组件、传动盘、支撑架、安装块、固定架和天线本体,所述调节组件设置有两个,且转动设置在支杆的两侧,所述顶盘内部设置有两个伺服电机,伺服电机的机轴前端均固定有传动盘,所述插接柱插接安装在插接槽内,所述插接柱上开设有供螺纹杆穿设的穿设槽,卡接腔内设置有辅助卡接的卡接结构。该可调节天线角度的天线支架,设计合理,能在需要时使天线进行任意角度的调

天线角度调节设备、天线及基站.pdf
本发明提供了一种天线角度调节设备、天线及基站,所述天线角度调节设备包括两个天线安装板与角度调节组件,所述角度调节组件包括第一角度调节齿轮、第二角度调节齿轮与传动机构,所述两个角度调节齿轮分别固设于所述两个天线安装板上,所述传动机构驱动所述两个角度调节齿轮同步运动,以驱动所述两个天线安装板沿相反方向同步转动,以实施开合运动,所述天线安装板用于安装辐射单元。本发明的天线角度调节设备可同时驱动两个天线安装板沿相反方向同步运动,以同步调节天线安装板的水平方位角,天线角度调节设备的结构简单,使用简单,便于大规模推广