
一种刚柔耦合式外骨骼机器人用背部助力背负结构.pdf

小寄****淑k

1/10

2/10

3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种刚柔耦合式外骨骼机器人用背部助力背负结构.pdf
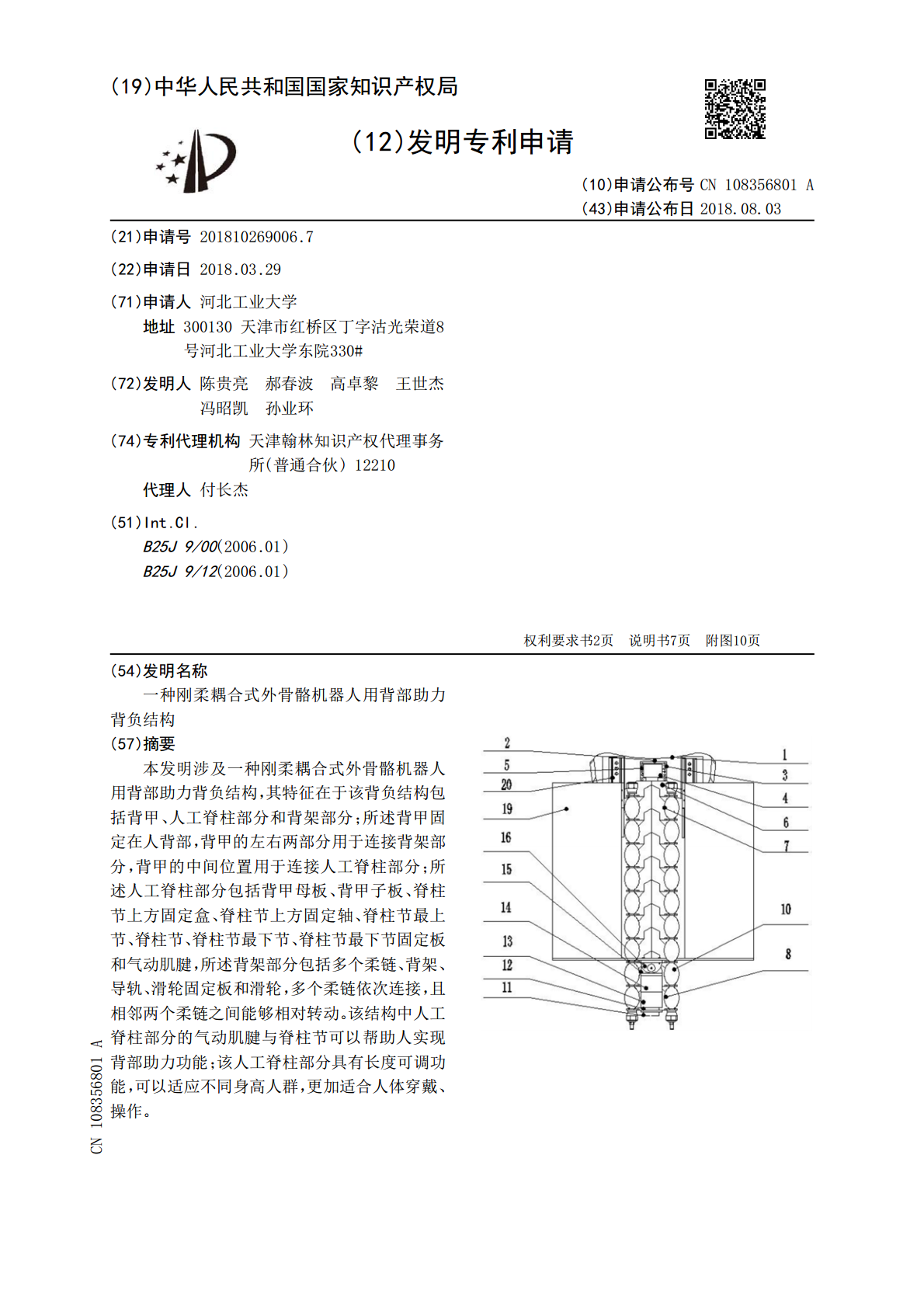
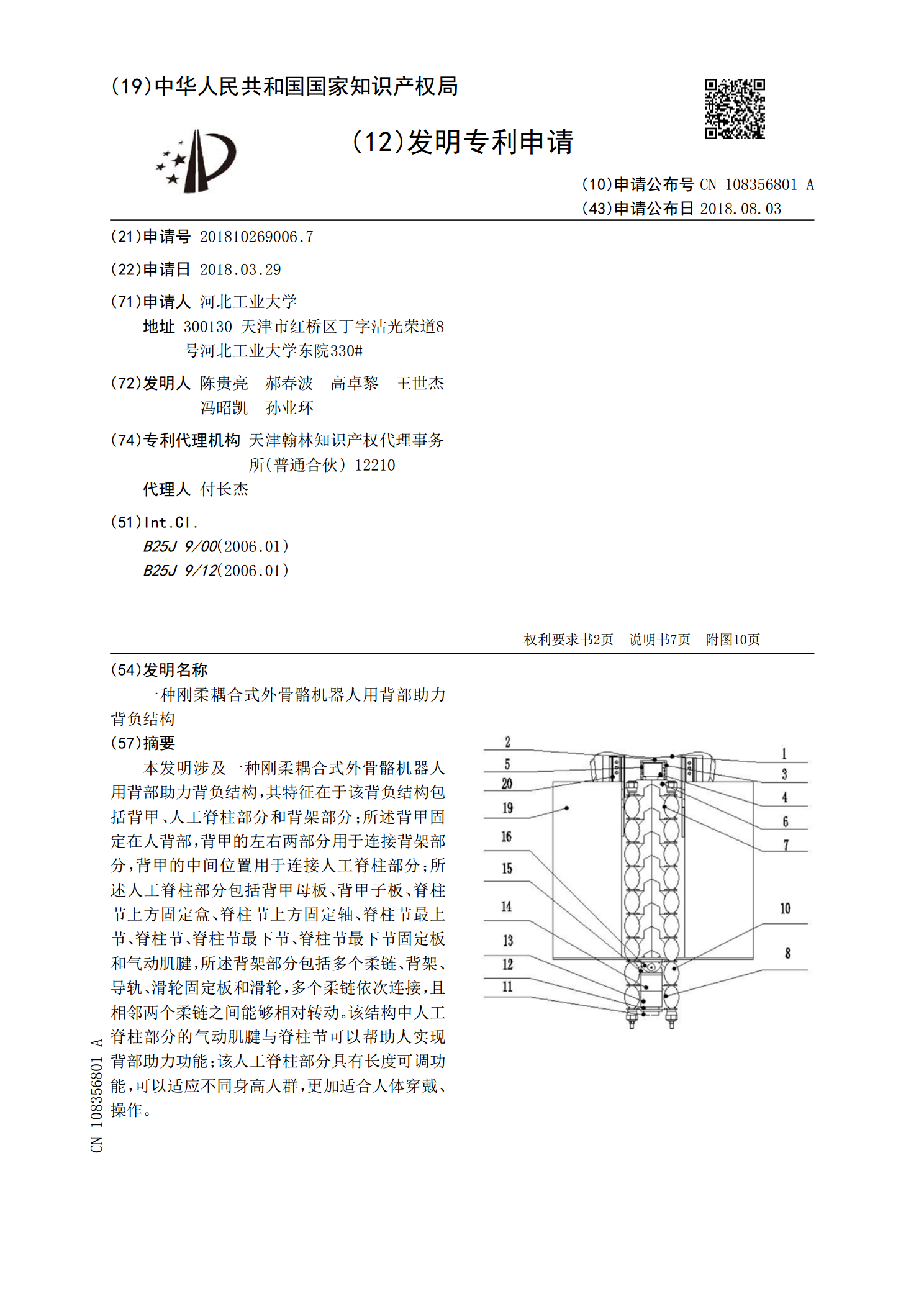
本发明涉及一种刚柔耦合式外骨骼机器人用背部助力背负结构,其特征在于该背负结构包括背甲、人工脊柱部分和背架部分;所述背甲固定在人背部,背甲的左右两部分用于连接背架部分,背甲的中间位置用于连接人工脊柱部分;所述人工脊柱部分包括背甲母板、背甲子板、脊柱节上方固定盒、脊柱节上方固定轴、脊柱节最上节、脊柱节、脊柱节最下节、脊柱节最下节固定板和气动肌腱,所述背架部分包括多个柔链、背架、导轨、滑轮固定板和滑轮,多个柔链依次连接,且相邻两个柔链之间能够相对转动。该结构中人工脊柱部分的气动肌腱与脊柱节可以帮助人实现背部助力
一种背部仿生外骨骼助力装置.pdf
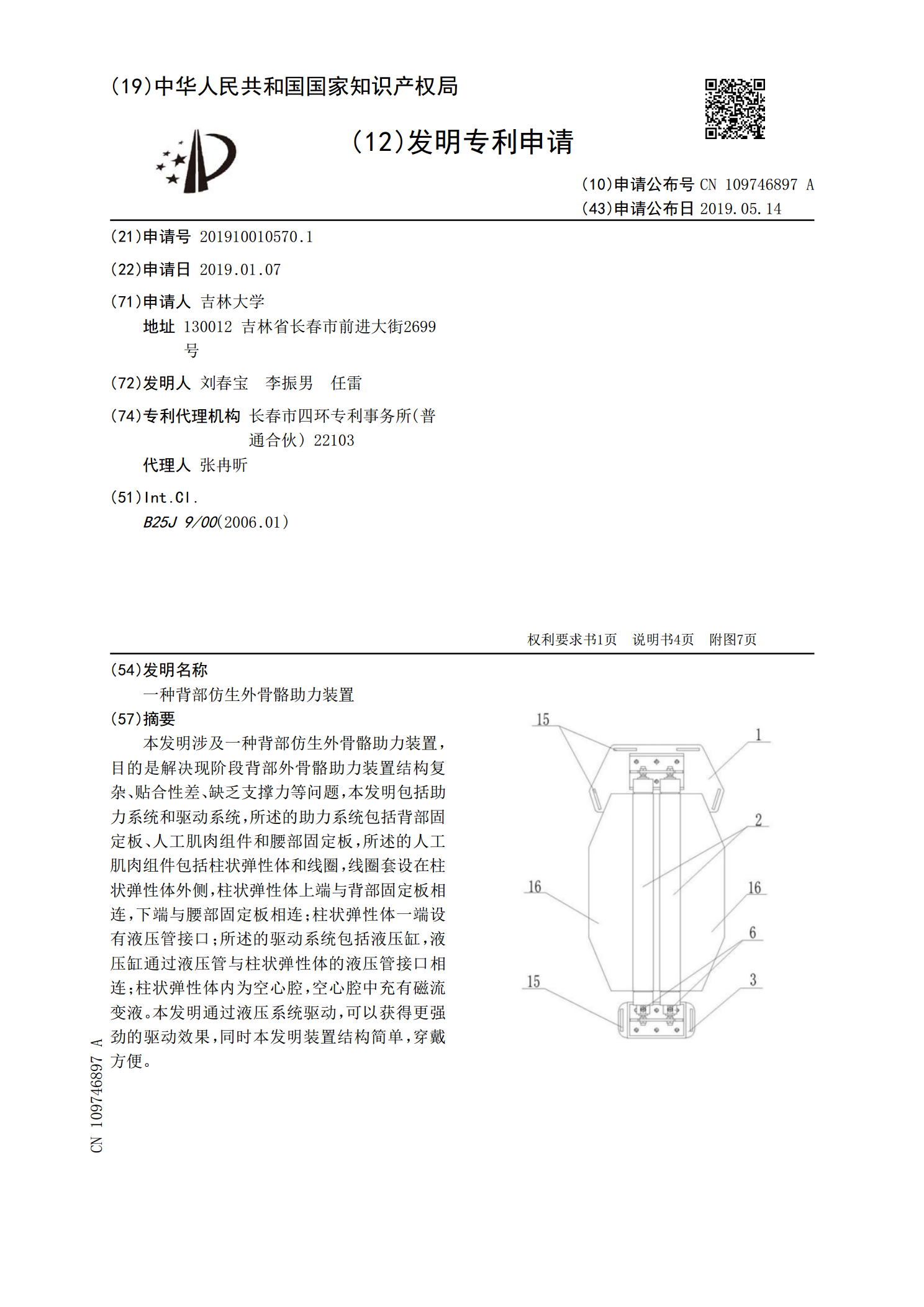
本发明涉及一种背部仿生外骨骼助力装置,目的是解决现阶段背部外骨骼助力装置结构复杂、贴合性差、缺乏支撑力等问题,本发明包括助力系统和驱动系统,所述的助力系统包括背部固定板、人工肌肉组件和腰部固定板,所述的人工肌肉组件包括柱状弹性体和线圈,线圈套设在柱状弹性体外侧,柱状弹性体上端与背部固定板相连,下端与腰部固定板相连;柱状弹性体一端设有液压管接口;所述的驱动系统包括液压缸,液压缸通过液压管与柱状弹性体的液压管接口相连;柱状弹性体内为空心腔,空心腔中充有磁流变液。本发明通过液压系统驱动,可以获得更强劲的驱动效果
一种助力型外骨骼用前抬式可调节背负系统.pdf
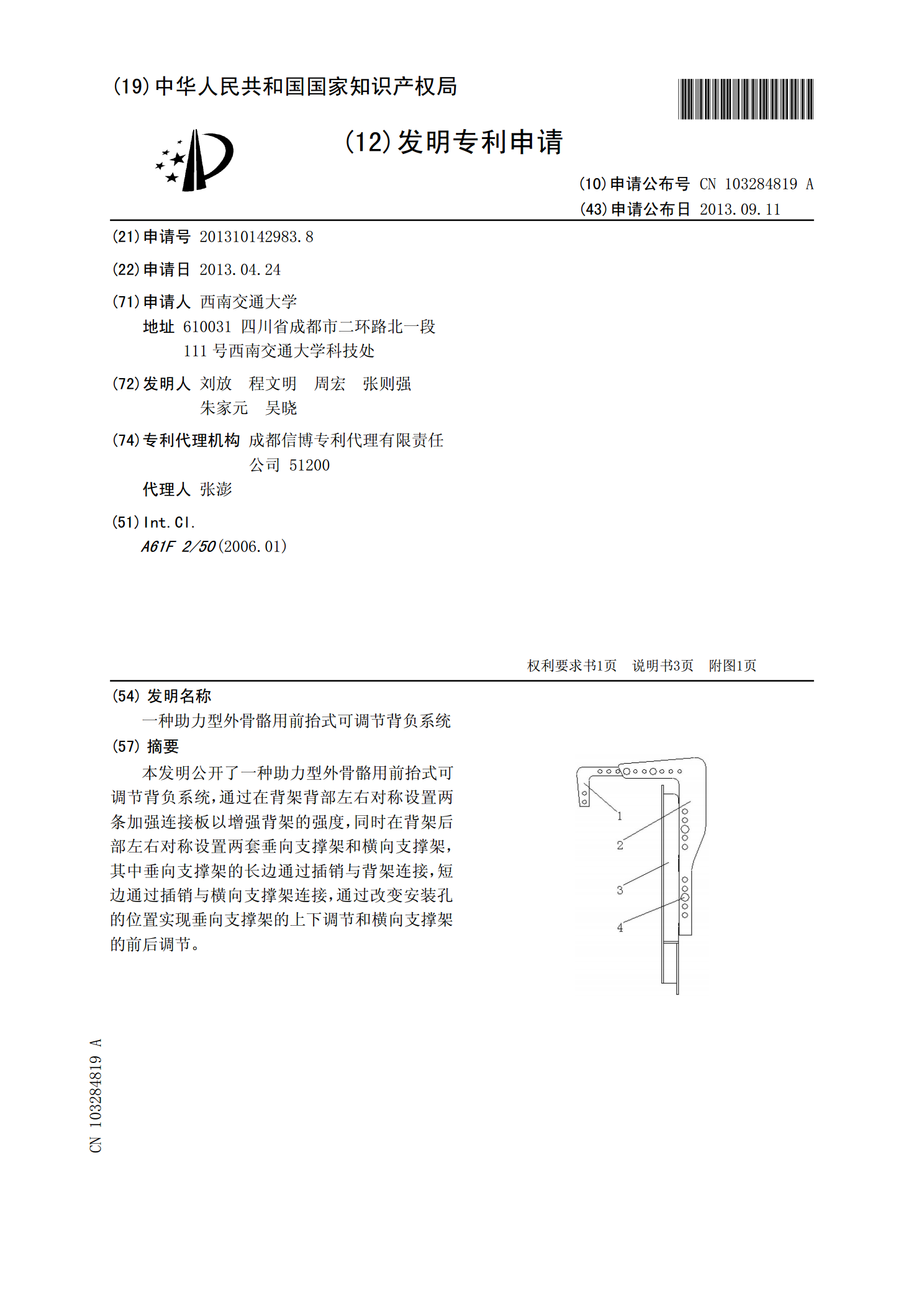
本发明公开了一种助力型外骨骼用前抬式可调节背负系统,通过在背架背部左右对称设置两条加强连接板以增强背架的强度,同时在背架后部左右对称设置两套垂向支撑架和横向支撑架,其中垂向支撑架的长边通过插销与背架连接,短边通过插销与横向支撑架连接,通过改变安装孔的位置实现垂向支撑架的上下调节和横向支撑架的前后调节。
一种助力外骨骼机器人的头部关节及助力外骨骼机器人.pdf
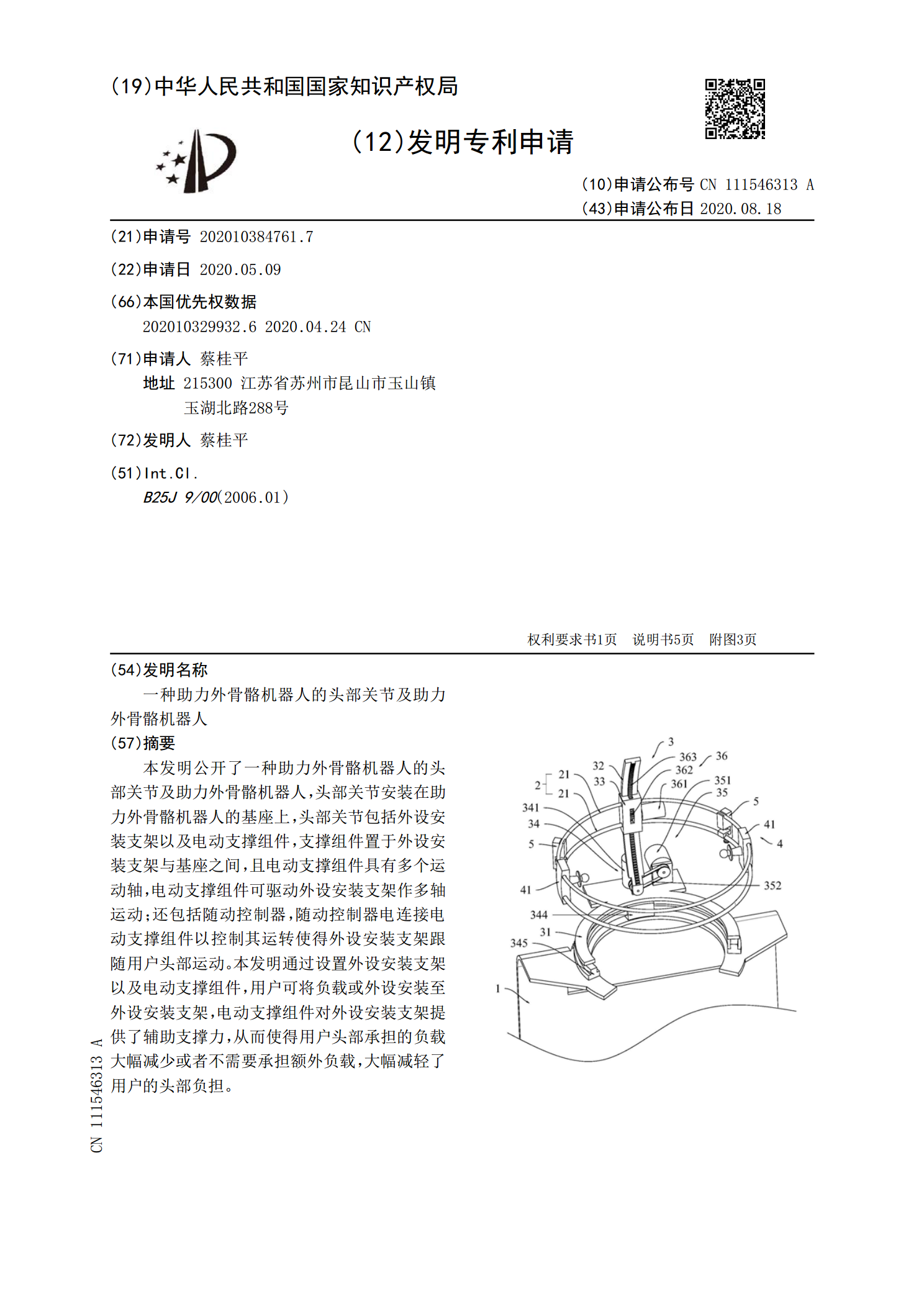
本发明公开了一种助力外骨骼机器人的头部关节及助力外骨骼机器人,头部关节安装在助力外骨骼机器人的基座上,头部关节包括外设安装支架以及电动支撑组件,支撑组件置于外设安装支架与基座之间,且电动支撑组件具有多个运动轴,电动支撑组件可驱动外设安装支架作多轴运动;还包括随动控制器,随动控制器电连接电动支撑组件以控制其运转使得外设安装支架跟随用户头部运动。本发明通过设置外设安装支架以及电动支撑组件,用户可将负载或外设安装至外设安装支架,电动支撑组件对外设安装支架提供了辅助支撑力,从而使得用户头部承担的负载大幅减少或者不
一种助力型外骨骼用背负系统抗倾覆多头螺纹阻尼器.pdf
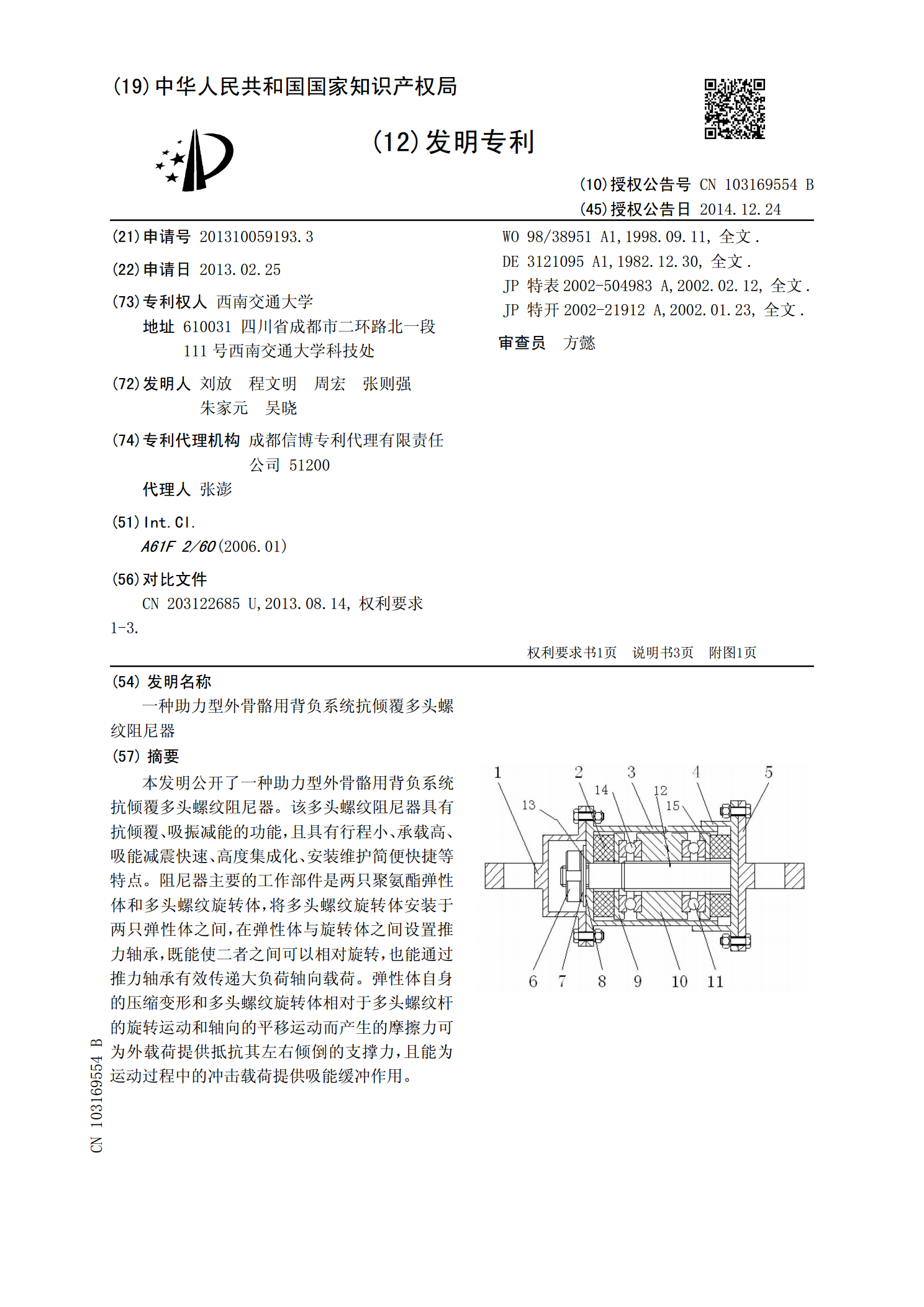
本发明公开了一种助力型外骨骼用背负系统抗倾覆多头螺纹阻尼器。该多头螺纹阻尼器具有抗倾覆、吸振减能的功能,且具有行程小、承载高、吸能减震快速、高度集成化、安装维护简便快捷等特点。阻尼器主要的工作部件是两只聚氨酯弹性体和多头螺纹旋转体,将多头螺纹旋转体安装于两只弹性体之间,在弹性体与旋转体之间设置推力轴承,既能使二者之间可以相对旋转,也能通过推力轴承有效传递大负荷轴向载荷。弹性体自身的压缩变形和多头螺纹旋转体相对于多头螺纹杆的旋转运动和轴向的平移运动而产生的摩擦力可为外载荷提供抵抗其左右倾倒的支撑力,且能为运