
一种适用于低转速下行星轮系故障诊断的振动分离方法.pdf

一条****轩吗

1/10
2/10

3/10
4/10
5/10
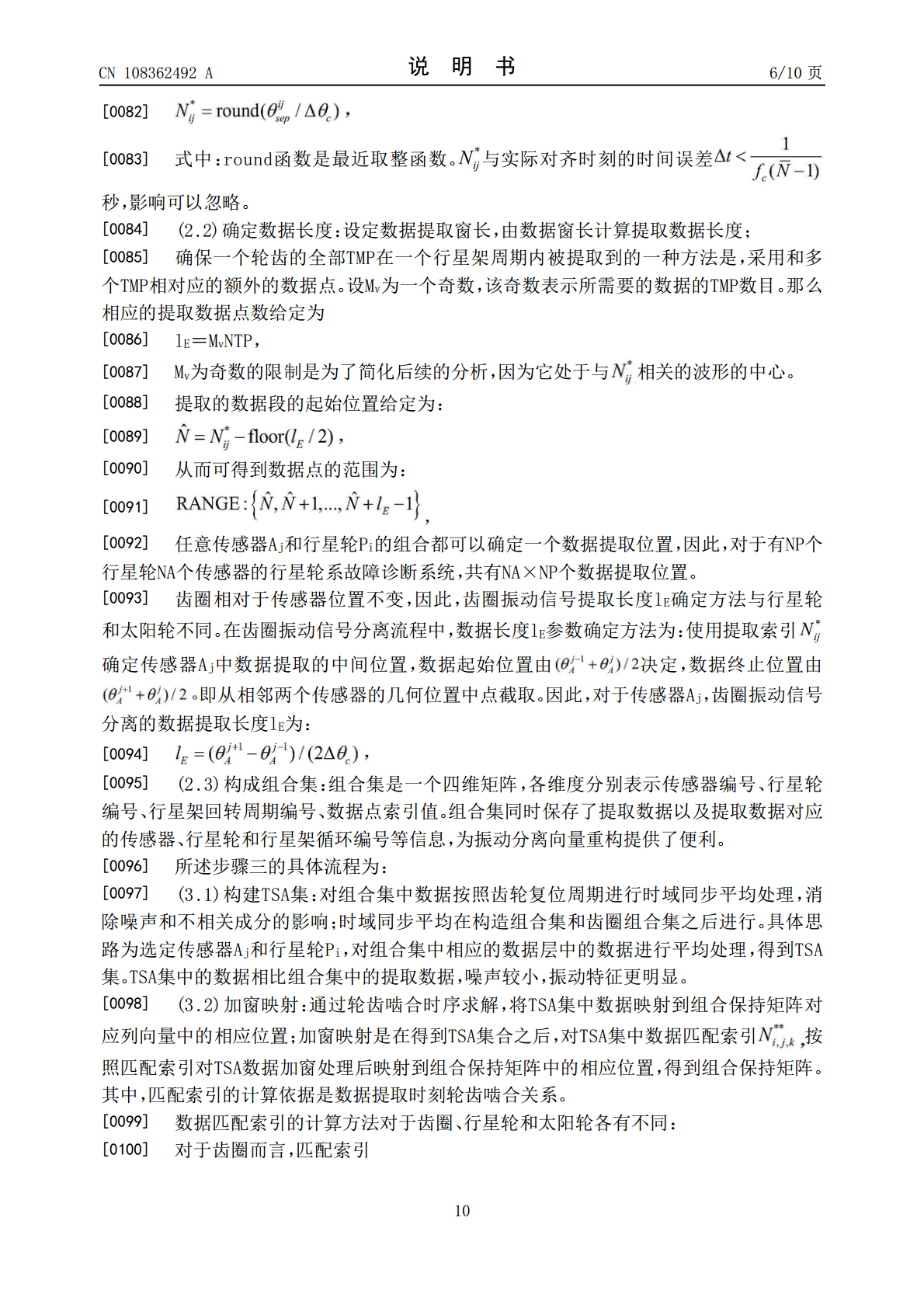
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种适用于低转速下行星轮系故障诊断的振动分离方法.pdf
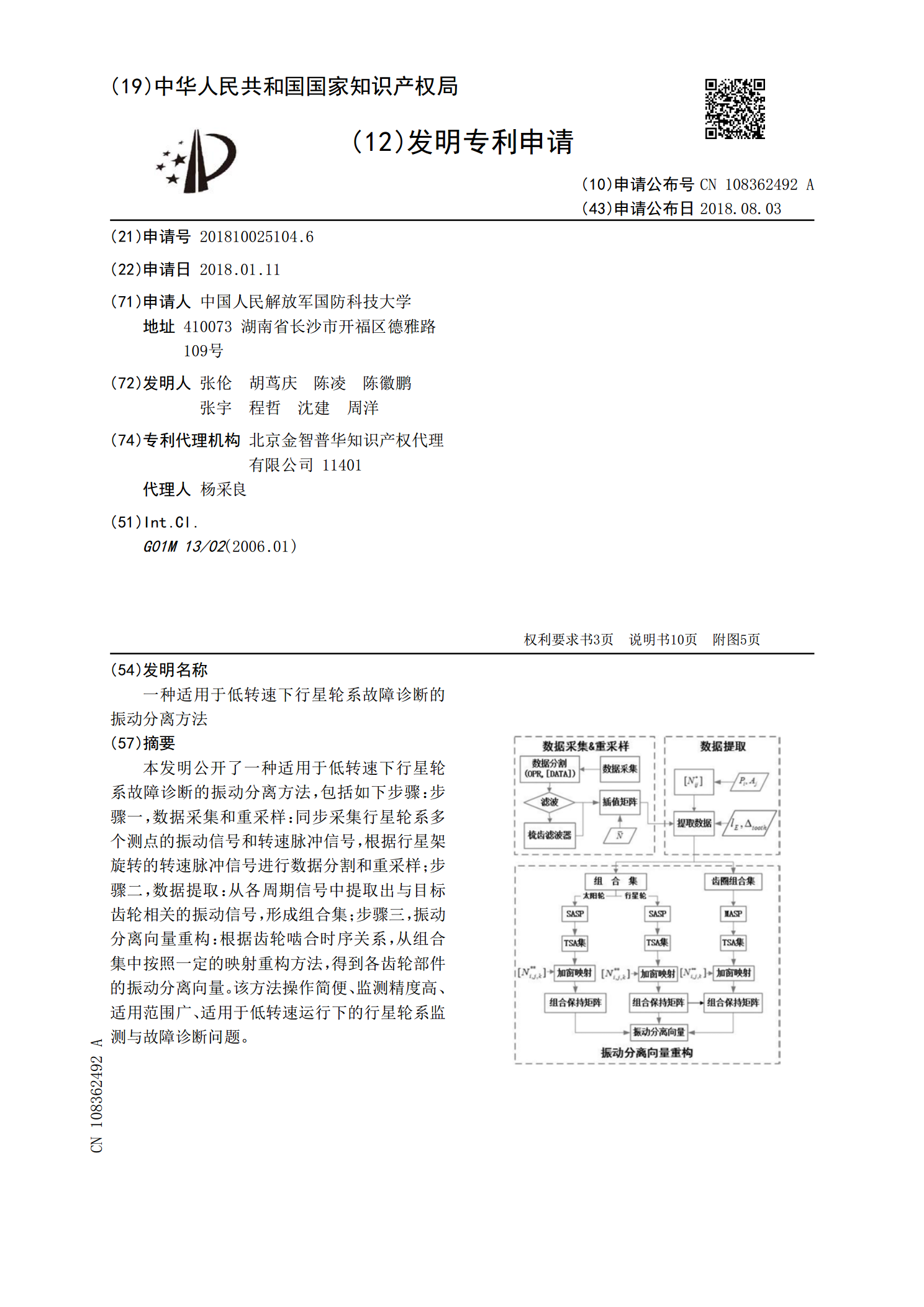
本发明公开了一种适用于低转速下行星轮系故障诊断的振动分离方法,包括如下步骤:步骤一,数据采集和重采样:同步采集行星轮系多个测点的振动信号和转速脉冲信号,根据行星架旋转的转速脉冲信号进行数据分割和重采样;步骤二,数据提取:从各周期信号中提取出与目标齿轮相关的振动信号,形成组合集;步骤三,振动分离向量重构:根据齿轮啮合时序关系,从组合集中按照一定的映射重构方法,得到各齿轮部件的振动分离向量。该方法操作简便、监测精度高、适用范围广、适用于低转速运行下的行星轮系监测与故障诊断问题。
一种用于故障诊断的行星齿轮箱振动信号分离方法及系统.pdf
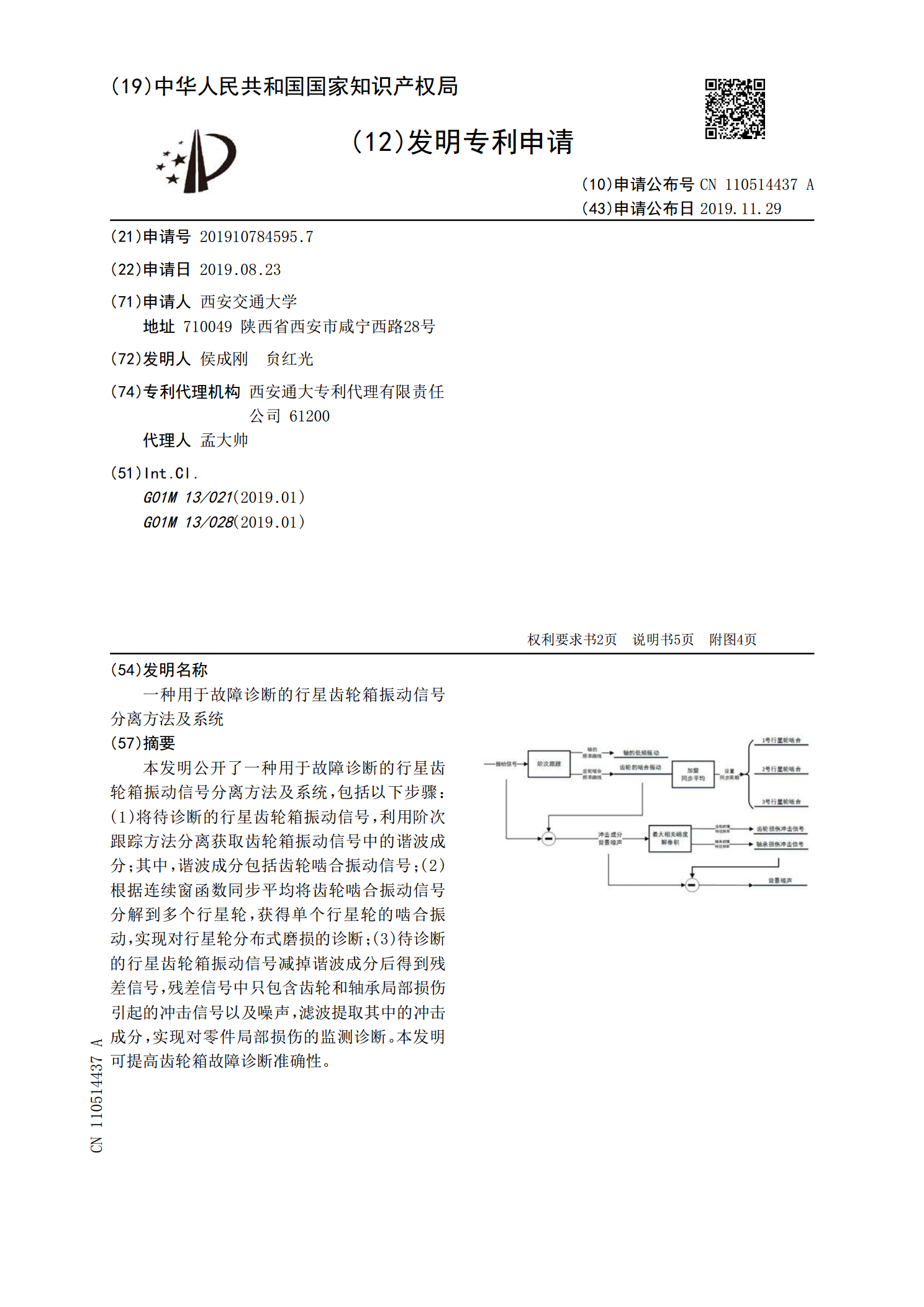
本发明公开了一种用于故障诊断的行星齿轮箱振动信号分离方法及系统,包括以下步骤:(1)将待诊断的行星齿轮箱振动信号,利用阶次跟踪方法分离获取齿轮箱振动信号中的谐波成分;其中,谐波成分包括齿轮啮合振动信号;(2)根据连续窗函数同步平均将齿轮啮合振动信号分解到多个行星轮,获得单个行星轮的啮合振动,实现对行星轮分布式磨损的诊断;(3)待诊断的行星齿轮箱振动信号减掉谐波成分后得到残差信号,残差信号中只包含齿轮和轴承局部损伤引起的冲击信号以及噪声,滤波提取其中的冲击成分,实现对零件局部损伤的监测诊断。本发明可提高齿轮
双行星轮系式枣子振动采收机及采收方法.pdf
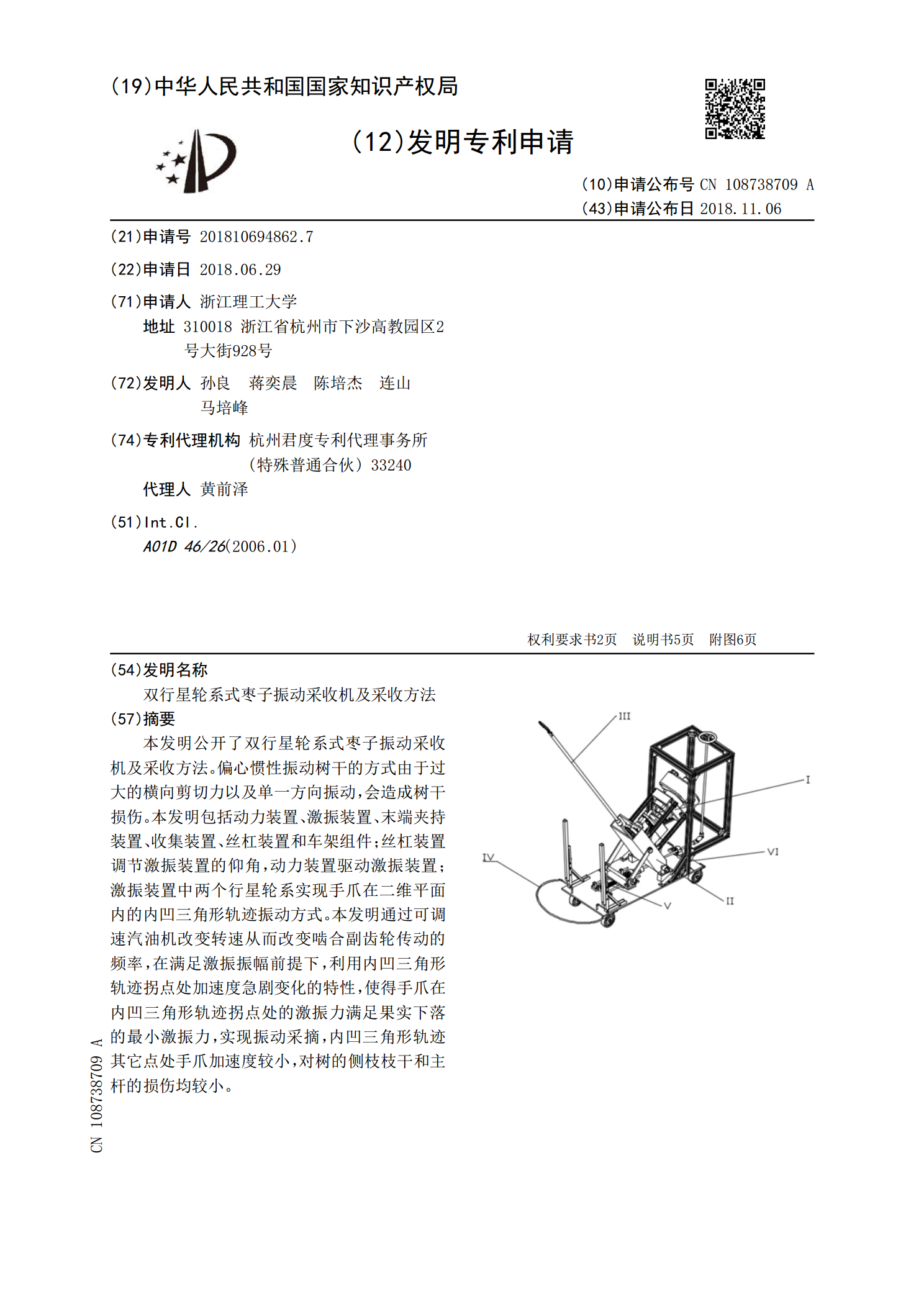
本发明公开了双行星轮系式枣子振动采收机及采收方法。偏心惯性振动树干的方式由于过大的横向剪切力以及单一方向振动,会造成树干损伤。本发明包括动力装置、激振装置、末端夹持装置、收集装置、丝杠装置和车架组件;丝杠装置调节激振装置的仰角,动力装置驱动激振装置;激振装置中两个行星轮系实现手爪在二维平面内的内凹三角形轨迹振动方式。本发明通过可调速汽油机改变转速从而改变啮合副齿轮传动的频率,在满足激振振幅前提下,利用内凹三角形轨迹拐点处加速度急剧变化的特性,使得手爪在内凹三角形轨迹拐点处的激振力满足果实下落的最小激振力,

一种行星轮系速度分析方法.docx
一种行星轮系速度分析方法引言宇宙中存在着许多行星轮系,并且它们的规模、数量、布局都各不相同。通过对行星轮系运行状态的研究,我们可以更好地了解宇宙的结构与运动规律。其中,行星轮系的速度分析是非常重要的一部分,它直接影响着行星轮系间的交互作用和行星轮系本身的演化。本文就围绕行星轮系的速度分析方法进行研究和探讨。问题的提出在进行行星轮系速度分析时,主要有两个问题需要解决,分别是如何确定行星的速度和如何确定轮系的速度。这两个问题都不是简单的问题,特别是行星速度的确定,需要考虑到多种因素的影响,如天体间的引力相互作

低转速下基于AE信号与LMD的滚动轴承故障诊断.docx
低转速下基于AE信号与LMD的滚动轴承故障诊断低转速下基于AE信号与LMD的滚动轴承故障诊断摘要:滚动轴承作为机械设备中重要的部件之一,在运行过程中常常会出现故障现象。故障的早期诊断对设备的可靠性和运行安全具有重要的意义。本文针对低转速下滚动轴承的故障诊断问题,提出了基于声发射(AE)信号和局部平均分解(LMD)的诊断方法。首先,通过AE传感器采集到滚动轴承工作时的声波信号,然后利用LMD方法对信号进行分解,得到多个具有不同频率和振幅的本征模态函数(IMF)。接下来,从IMF中提取特征参数,并建立故障诊断