
一种地面磨平机器人及地面磨平机器人控制方法.pdf

书生****写意

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种地面磨平机器人及地面磨平机器人控制方法.pdf
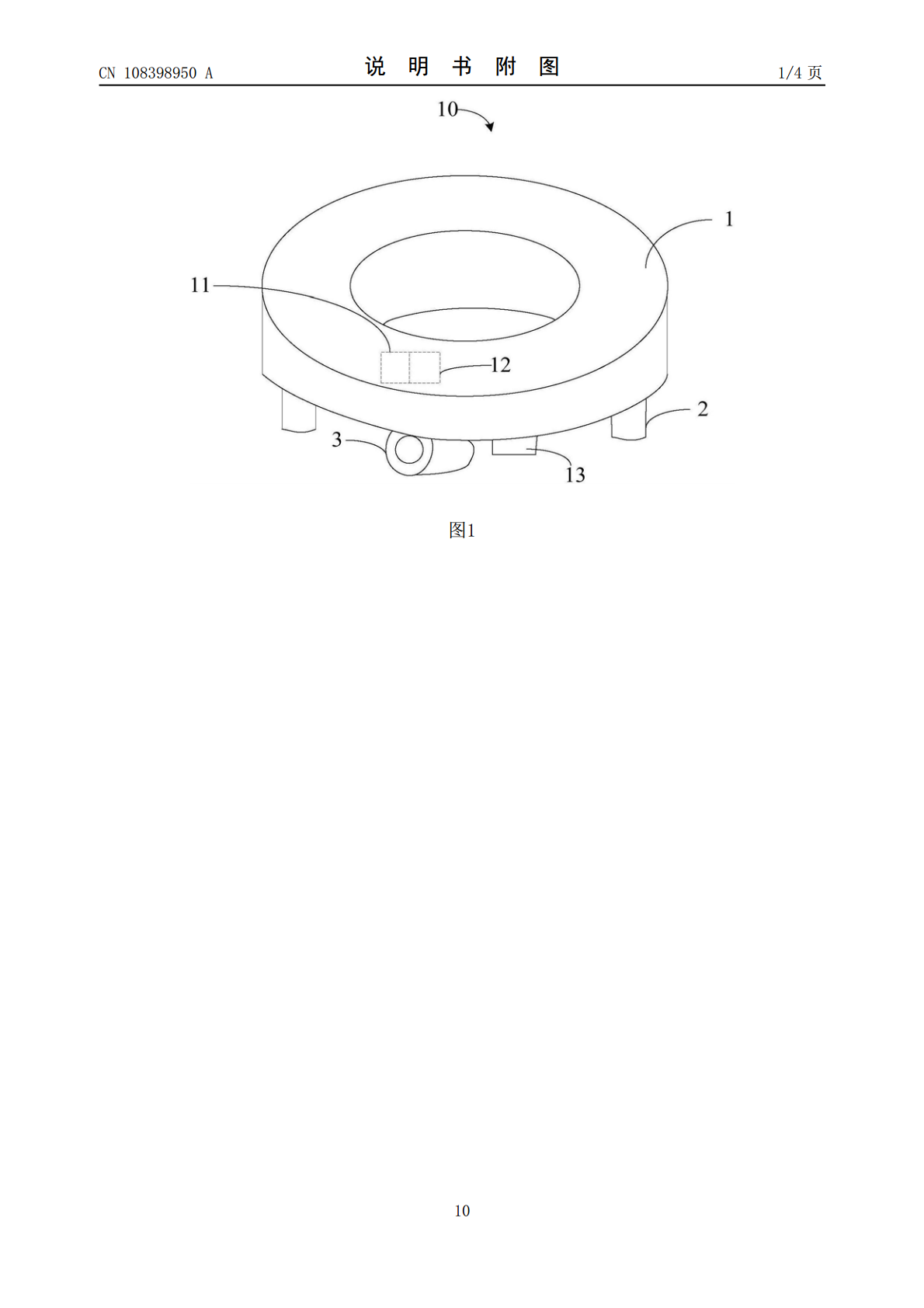
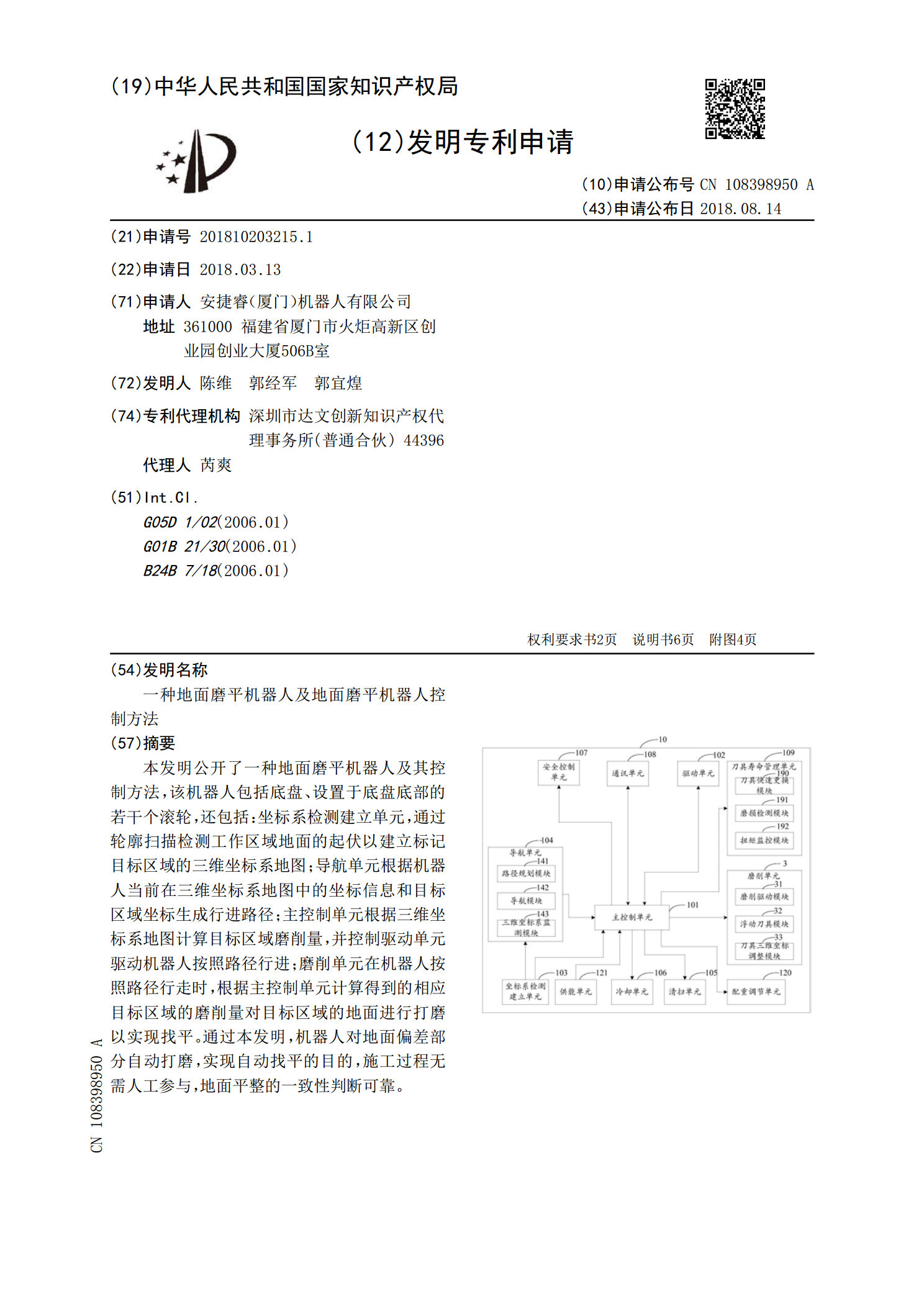
本发明公开了一种地面磨平机器人及其控制方法,该机器人包括底盘、设置于底盘底部的若干个滚轮,还包括:坐标系检测建立单元,通过轮廓扫描检测工作区域地面的起伏以建立标记目标区域的三维坐标系地图;导航单元根据机器人当前在三维坐标系地图中的坐标信息和目标区域坐标生成行进路径;主控制单元根据三维坐标系地图计算目标区域磨削量,并控制驱动单元驱动机器人按照路径行进;磨削单元在机器人按照路径行走时,根据主控制单元计算得到的相应目标区域的磨削量对目标区域的地面进行打磨以实现找平。通过本发明,机器人对地面偏差部分自动打磨,实现
一种地面磨平机.pdf
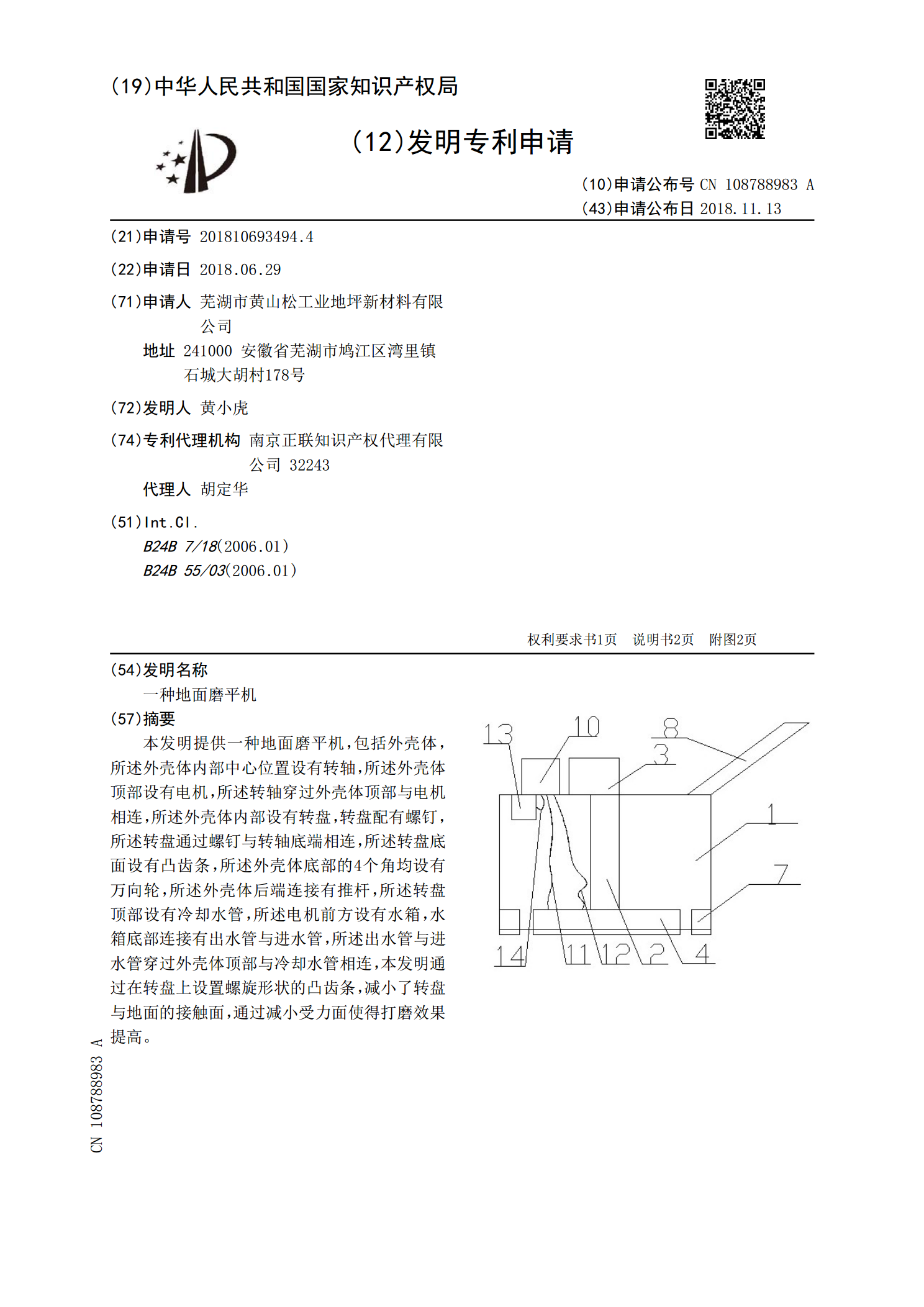
本发明提供一种地面磨平机,包括外壳体,所述外壳体内部中心位置设有转轴,所述外壳体顶部设有电机,所述转轴穿过外壳体顶部与电机相连,所述外壳体内部设有转盘,转盘配有螺钉,所述转盘通过螺钉与转轴底端相连,所述转盘底面设有凸齿条,所述外壳体底部的4个角均设有万向轮,所述外壳体后端连接有推杆,所述转盘顶部设有冷却水管,所述电机前方设有水箱,水箱底部连接有出水管与进水管,所述出水管与进水管穿过外壳体顶部与冷却水管相连,本发明通过在转盘上设置螺旋形状的凸齿条,减小了转盘与地面的接触面,通过减小受力面使得打磨效果提高。
一种地面磨平处理装置.pdf
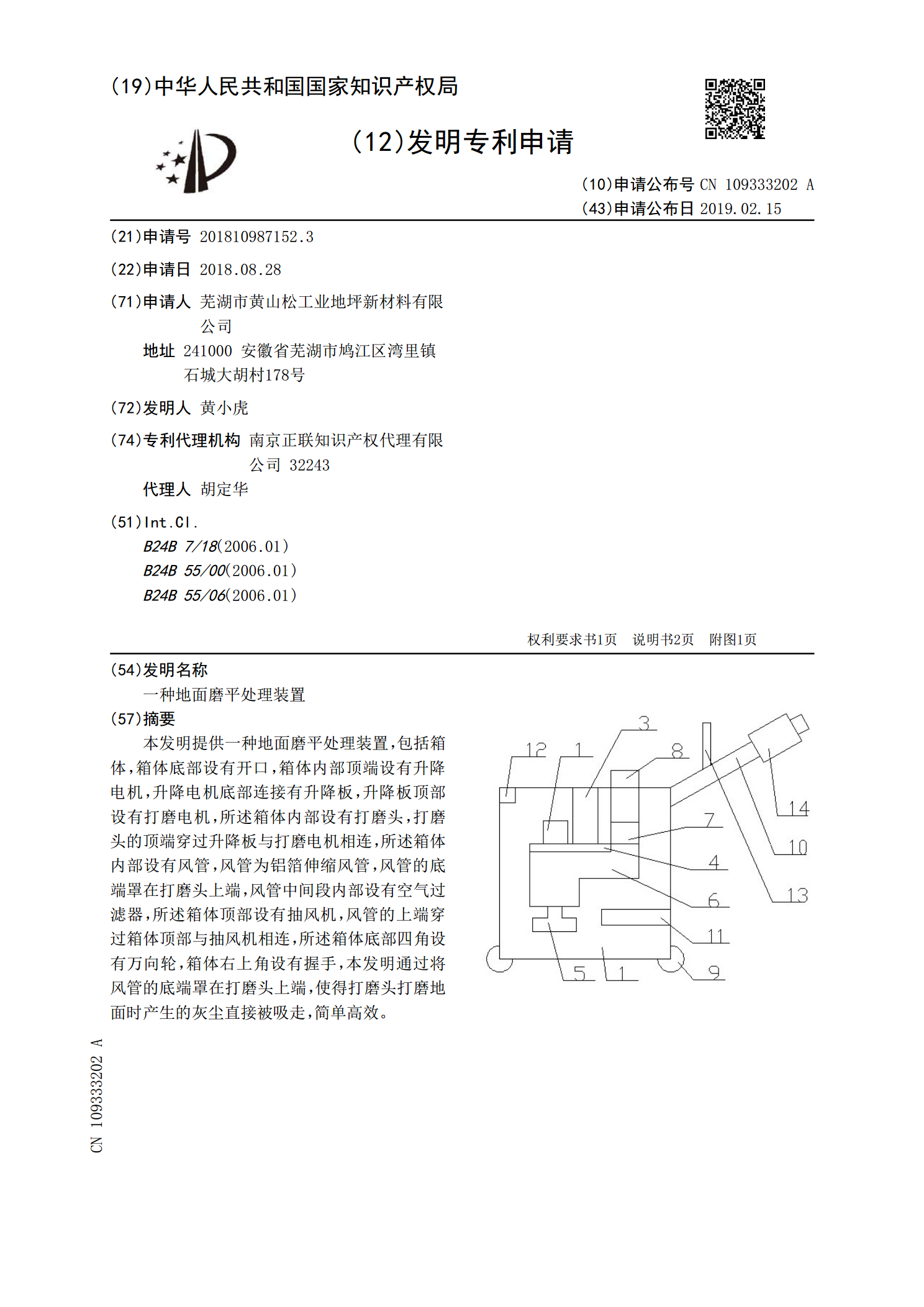
本发明提供一种地面磨平处理装置,包括箱体,箱体底部设有开口,箱体内部顶端设有升降电机,升降电机底部连接有升降板,升降板顶部设有打磨电机,所述箱体内部设有打磨头,打磨头的顶端穿过升降板与打磨电机相连,所述箱体内部设有风管,风管为铝箔伸缩风管,风管的底端罩在打磨头上端,风管中间段内部设有空气过滤器,所述箱体顶部设有抽风机,风管的上端穿过箱体顶部与抽风机相连,所述箱体底部四角设有万向轮,箱体右上角设有握手,本发明通过将风管的底端罩在打磨头上端,使得打磨头打磨地面时产生的灰尘直接被吸走,简单高效。
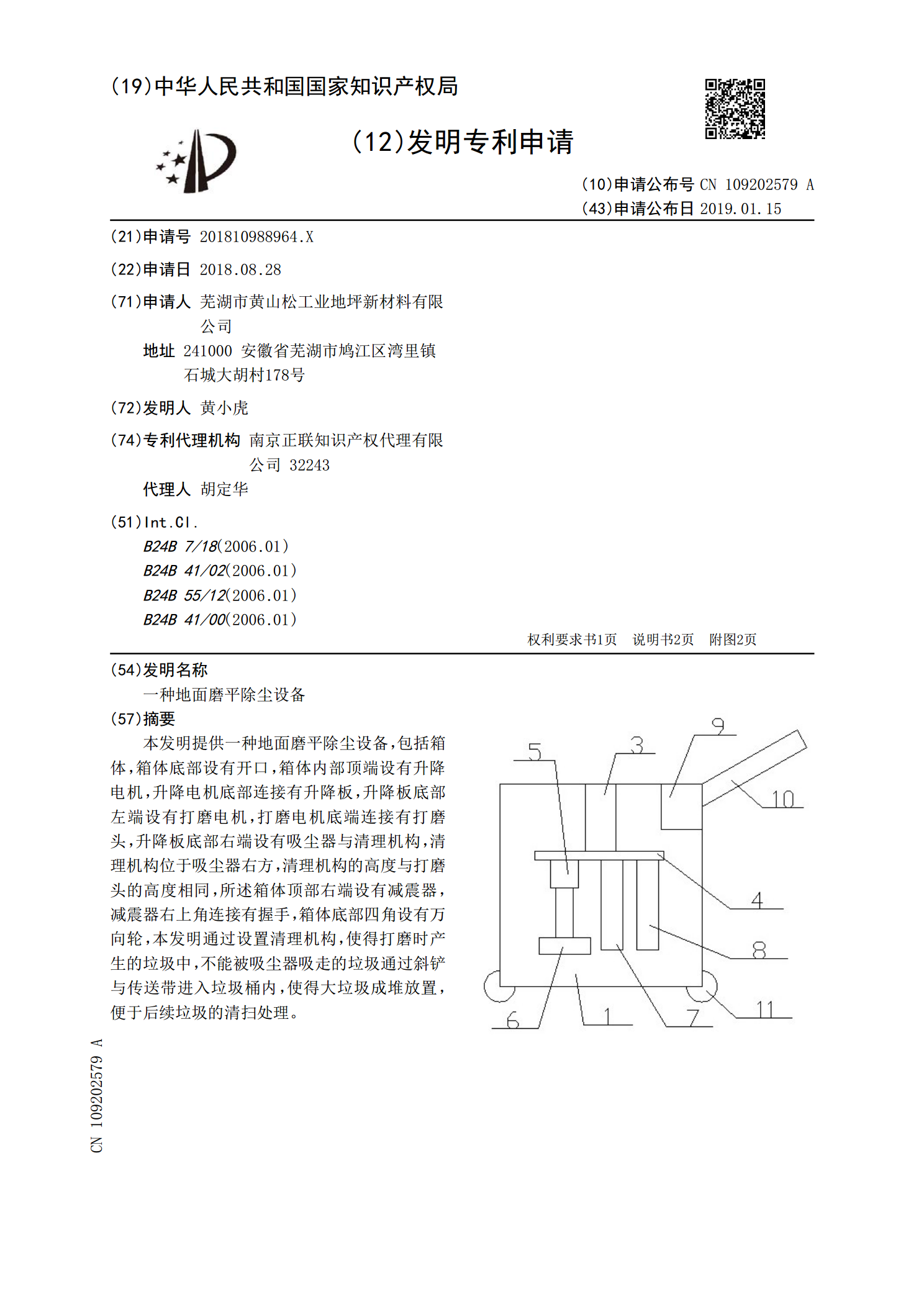
一种地面磨平除尘设备.pdf
本发明提供一种地面磨平除尘设备,包括箱体,箱体底部设有开口,箱体内部顶端设有升降电机,升降电机底部连接有升降板,升降板底部左端设有打磨电机,打磨电机底端连接有打磨头,升降板底部右端设有吸尘器与清理机构,清理机构位于吸尘器右方,清理机构的高度与打磨头的高度相同,所述箱体顶部右端设有减震器,减震器右上角连接有握手,箱体底部四角设有万向轮,本发明通过设置清理机构,使得打磨时产生的垃圾中,不能被吸尘器吸走的垃圾通过斜铲与传送带进入垃圾桶内,使得大垃圾成堆放置,便于后续垃圾的清扫处理。
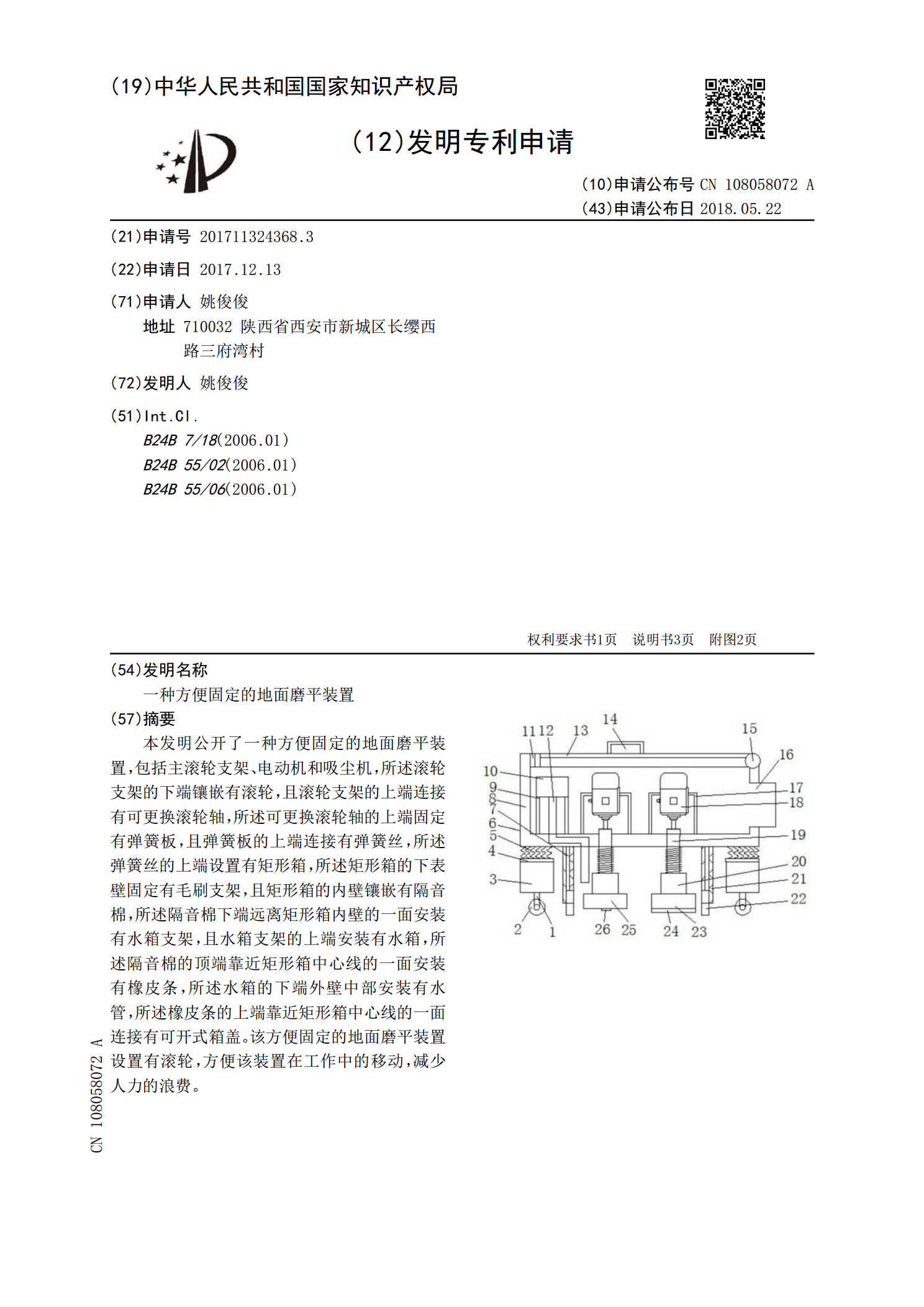
一种方便固定的地面磨平装置.pdf
本发明公开了一种方便固定的地面磨平装置,包括主滚轮支架、电动机和吸尘机,所述滚轮支架的下端镶嵌有滚轮,且滚轮支架的上端连接有可更换滚轮轴,所述可更换滚轮轴的上端固定有弹簧板,且弹簧板的上端连接有弹簧丝,所述弹簧丝的上端设置有矩形箱,所述矩形箱的下表壁固定有毛刷支架,且矩形箱的内壁镶嵌有隔音棉,所述隔音棉下端远离矩形箱内壁的一面安装有水箱支架,且水箱支架的上端安装有水箱,所述隔音棉的顶端靠近矩形箱中心线的一面安装有橡皮条,所述水箱的下端外壁中部安装有水管,所述橡皮条的上端靠近矩形箱中心线的一面连接有可开式箱