
一种基于滑移率的四驱电动汽车转矩控制分配方法.pdf

是秋****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于滑移率的四驱电动汽车转矩控制分配方法.pdf
本发明公开了一种基于滑移率的四驱电动汽车转矩控制分配方法,针对四驱电动汽车,进行滑移率计算和轮胎力控制分配,然后根据滑移率判断轮胎是否处于稳定状态,若汽车处于稳定状态,则通过轮胎逆模型求解目标滑移率,进行滑移率控制,实现车轮转矩分配;若汽车处于不稳定状态,则利用滑模极值搜索算法控制车轮转矩,实现最优滑移率和最大轮胎力。该方法考虑轮胎的动力学特性,基于滑移率对轮胎力进行准确控制,同时能够防止车轮滑移率过大,出现车轮抱死或滑转,有效提高四驱电动汽车的动力学安全性能。

基于ECMS的PHEV四驱转矩分配方法.pdf
本发明公开一种基于ECMS的PHEV四驱转矩分配方法,具体包括:步骤1,根据动力电池的剩余电量计算等效燃油消耗因子;步骤2,计算瞬时总等效燃油消耗率;步骤3,将发动机、BSG电机和后桥电机的所有工作转矩组合换算至驱动轮工作转矩,根据驱动轮工作转矩的范围,确定各动力源工作扭矩范围;步骤4,在各动力源的实际工作转矩范围内,求解瞬时总等效燃油消耗率的最小值;步骤5,将最小瞬时总等效燃油消耗率对应的各动力源的工作转矩作为PHEV最佳工作扭矩进行分配;本发明简化了转矩分配的计算过程,合理分配混合动力汽车各动力源的转

基于多智能体的电动汽车滑移率控制方法.docx
基于多智能体的电动汽车滑移率控制方法本文将基于多智能体的电动汽车滑移率控制方法展开研究。首先,我们将介绍电动汽车滑移率的概念及其影响因素,接着分析滑移率控制的重要性和挑战。然后,我们将介绍基于多智能体的滑移率控制方法,并探讨其优势和应用前景。最后,我们将进行总结和展望。一、电动汽车滑移率的概念及其影响因素滑移率是指轮胎与路面的滑动比率,是衡量车辆制动、加速、转弯等性能的重要指标。滑移率一般用百分数表示,其值越大,说明轮胎在路面上的滑动越多,车辆的牵引和制动能力越差。滑移率受到多种因素的影响,主要包括路面摩
一种四轮驱动电动汽车转矩分配控制方法.pdf
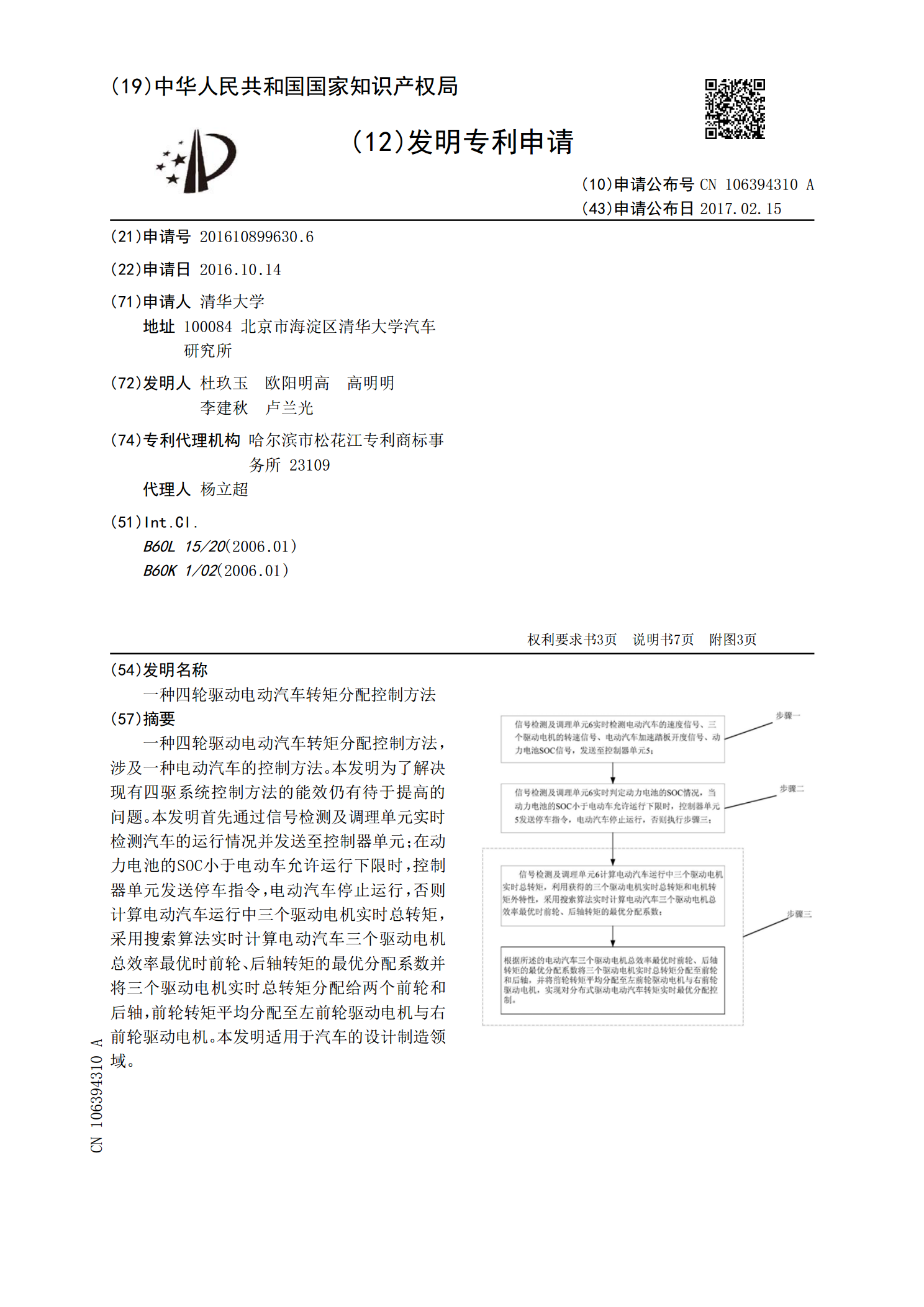
一种四轮驱动电动汽车转矩分配控制方法,涉及一种电动汽车的控制方法。本发明为了解决现有四驱系统控制方法的能效仍有待于提高的问题。本发明首先通过信号检测及调理单元实时检测汽车的运行情况并发送至控制器单元;在动力电池的SOC小于电动车允许运行下限时,控制器单元发送停车指令,电动汽车停止运行,否则计算电动汽车运行中三个驱动电机实时总转矩,采用搜索算法实时计算电动汽车三个驱动电机总效率最优时前轮、后轴转矩的最优分配系数并将三个驱动电机实时总转矩分配给两个前轮和后轴,前轮转矩平均分配至左前轮驱动电机与右前轮驱动电机。

一种基于相对滑移率的电动汽车电子差速控制方法研究.docx
一种基于相对滑移率的电动汽车电子差速控制方法研究本论文将重点研究一种基于相对滑移率的电动汽车电子差速控制方法。随着电动汽车的发展和普及,其安全性和动力性逐渐成为人们关注的焦点。在提高电动汽车行驶性能和安全性方面,差速控制技术具有重要作用。本文将从以下几方面对基于相对滑移率的电动汽车电子差速控制方法进行研究:一、电子差速控制技术的概述电子差速控制技术是一种通过对车轮速度和转矩进行控制,从而实现车轮间力的分配和控制的技术。电子差速控制系统可以通过精确调节车轮间的转矩分配,避免车轮间的滑动和侧滑,从而提高车辆的