
一种用于机械加工的工件转运装置及其使用方法.pdf

佳晨****ng


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种用于机械加工的工件转运装置及其使用方法.pdf
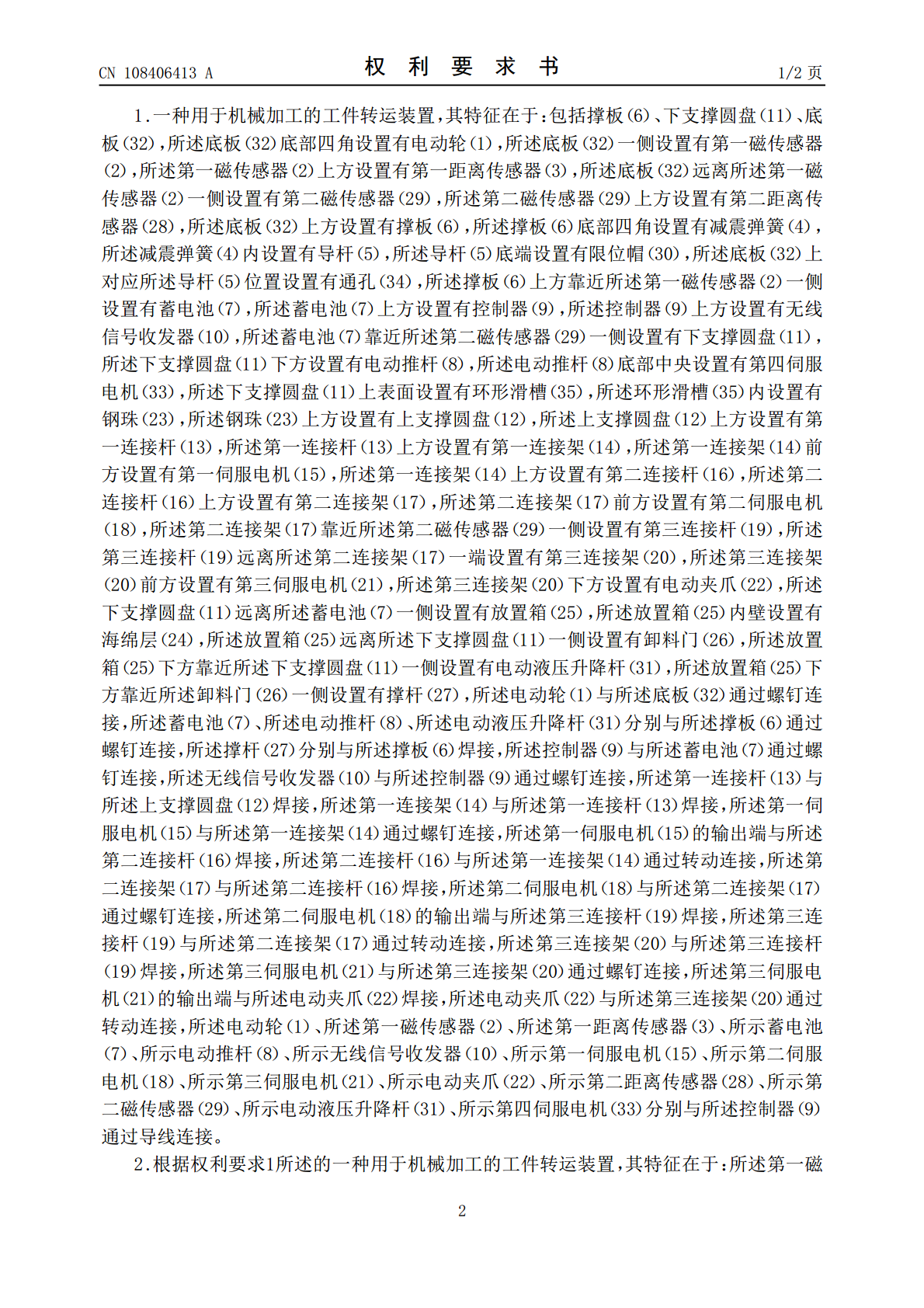
本发明公开了一种用于机械加工的工件转运装置及其使用方法,包括撑板、下支撑圆盘、底板,所述底板底部四角设置有电动轮,所述底板一侧设置有第一磁传感器,所述第一磁传感器上方设置有第一距离传感器,所述底板远离所述第一磁传感器一侧设置有第二磁传感器,所述第二磁传感器上方设置有第二距离传感器,所述底板上方设置有撑板。有益效果在于:1、设置磁传感器、距离传感器可以沿地面磁条指定路线行进,并且可以通过感应附近是否存在障碍物,避免发生碰撞,能够实现自动移动;2、可以调整高度和角度来进行抓取不同位置的工件,增大适用范围;3、

一种用于机械加工的工件转运装置.pdf
本发明公布了一种用于机械加工的工件转运装置,包括转运推车(1),在所述转运推车(1)上固定安装有套筒(2),在所述套筒(2)内套装有套柱(3),在套柱(3)顶部设置有工件存放装置。本发明通过将工件放置在工件存放装置内并通过转运推车将工件转运至不同地点,减少了机械设备成本和动力成本,合理地分配和利用了资源;通过在工件存放装置上设置两个滚轮,可以减少工件与工件存放装置之间的摩擦力,有效避免工件的损坏;在套柱顶部设置的限位结构不仅能够有效限制套柱的晃动、偏移、甚至翻倒,而且能将部分工件的重力传递至套筒,减小了套

一种用于机械加工的工件转运方法.pdf
本发明公布了一种用于机械加工的工件转运方法,包括转运推车(1),在所述转运推车(1)上固定安装有套筒(2),在所述套筒(2)内套装有套柱(3),在套柱(3)顶部设置有工件存放装置。本发明通过将工件放置在工件存放装置内并通过转运推车将工件转运至不同地点,减少了机械设备成本和动力成本,合理地分配和利用了资源;通过在工件存放装置上设置两个滚轮,可以减少工件与工件存放装置之间的摩擦力,有效避免工件的损坏;在套柱顶部设置的限位结构不仅能够有效限制套柱的晃动、偏移、甚至翻倒,而且能将部分工件的重力传递至套筒,减小了套
一种用于工件加工的工作台装置及其使用方法.pdf
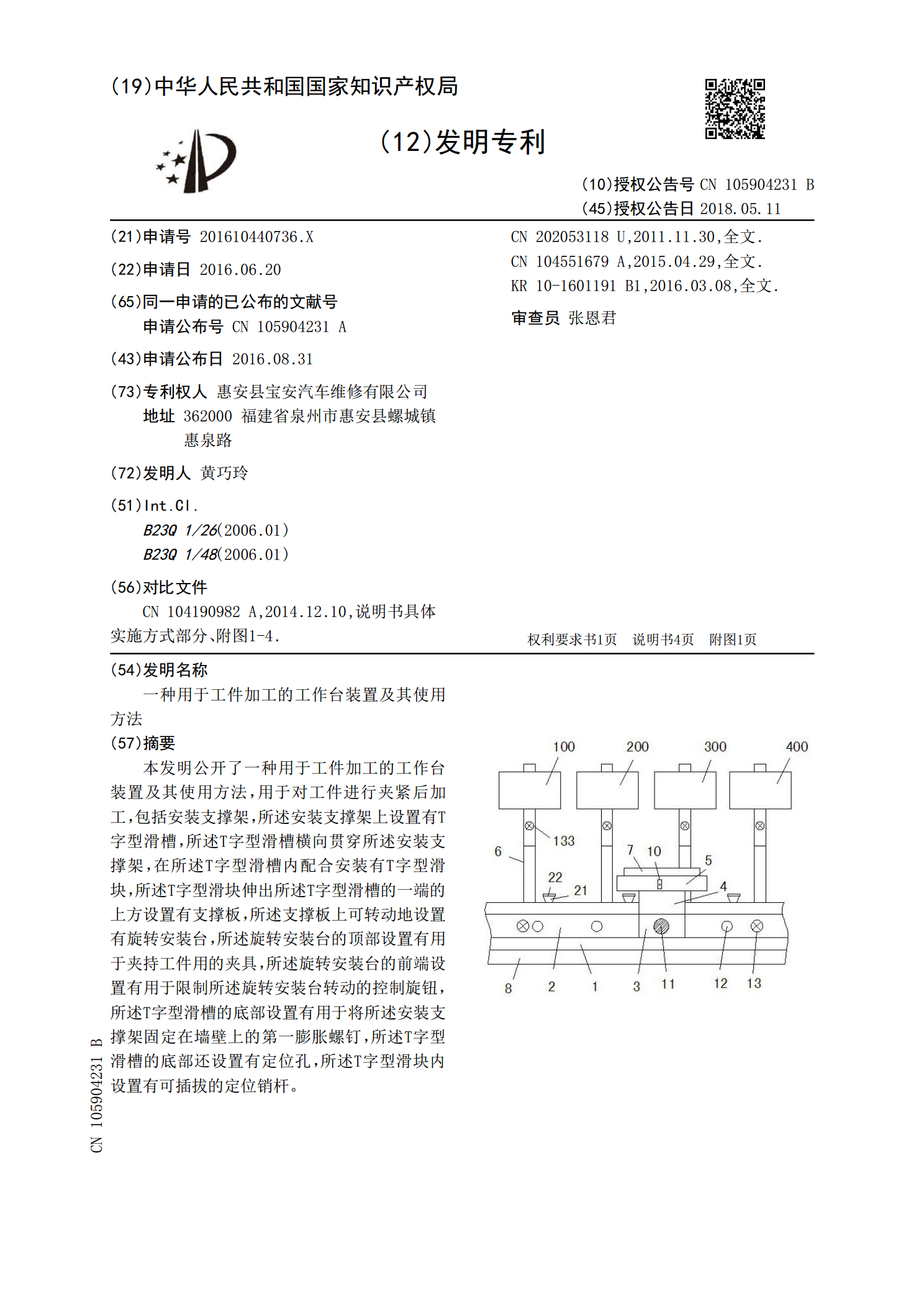
本发明公开了一种用于工件加工的工作台装置及其使用方法,用于对工件进行夹紧后加工,包括安装支撑架,所述安装支撑架上设置有T字型滑槽,所述T字型滑槽横向贯穿所述安装支撑架,在所述T字型滑槽内配合安装有T字型滑块,所述T字型滑块伸出所述T字型滑槽的一端的上方设置有支撑板,所述支撑板上可转动地设置有旋转安装台,所述旋转安装台的顶部设置有用于夹持工件用的夹具,所述旋转安装台的前端设置有用于限制所述旋转安装台转动的控制旋钮,所述T字型滑槽的底部设置有用于将所述安装支撑架固定在墙壁上的第一膨胀螺钉,所述T字型滑槽的底部

一种便于转动的机械加工工件转运装置.pdf
本发明公布了一种便于转动的机械加工工件转运装置,包括转运推车(1)、套筒(2)、套柱(3)、转动盘(4),在转动盘(4)的侧面上至少设置有1个转柄(9),在所述转动盘(4)的顶部设置有工件存放装置。本发明通过转柄带动转动盘,从而调整工件存放装置的位置,合理地分配和利用了资源;;通过在工件存放装置上设置两个滚轮,可以减少工件与工件存放装置之间的摩擦力,有效避免工件的损坏;在套柱顶部设置的限位结构不仅能够有效限制套柱的晃动、偏移、甚至翻倒,而且能将部分工件的重力传递至套筒,减小了套柱对转运推车的压力,减小了转