
一种视线跟踪系统中的瞳孔定位方法.pdf

一吃****福乾

1/10
2/10

3/10
4/10
5/10
6/10
7/10

8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种视线跟踪系统中的瞳孔定位方法.pdf
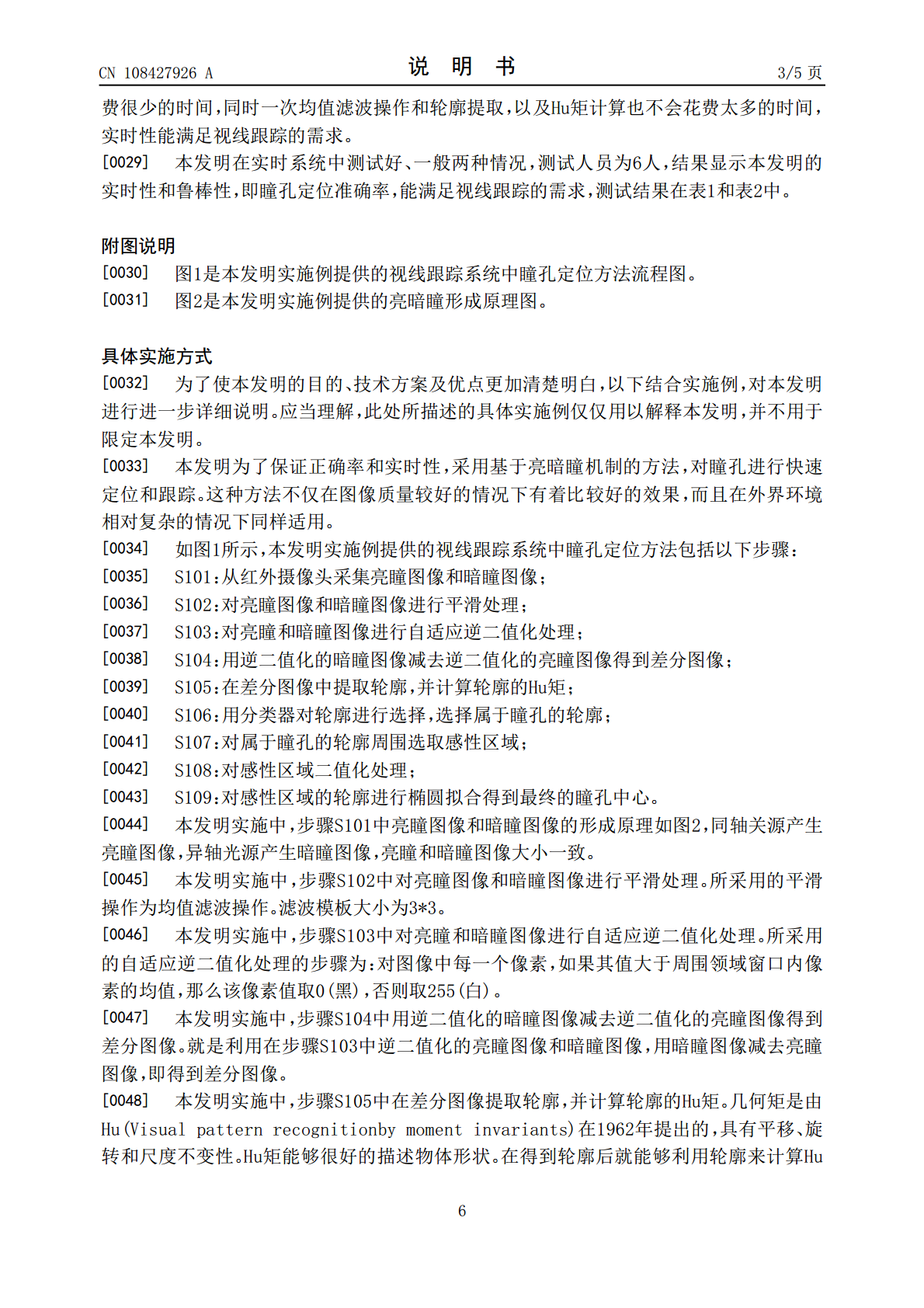
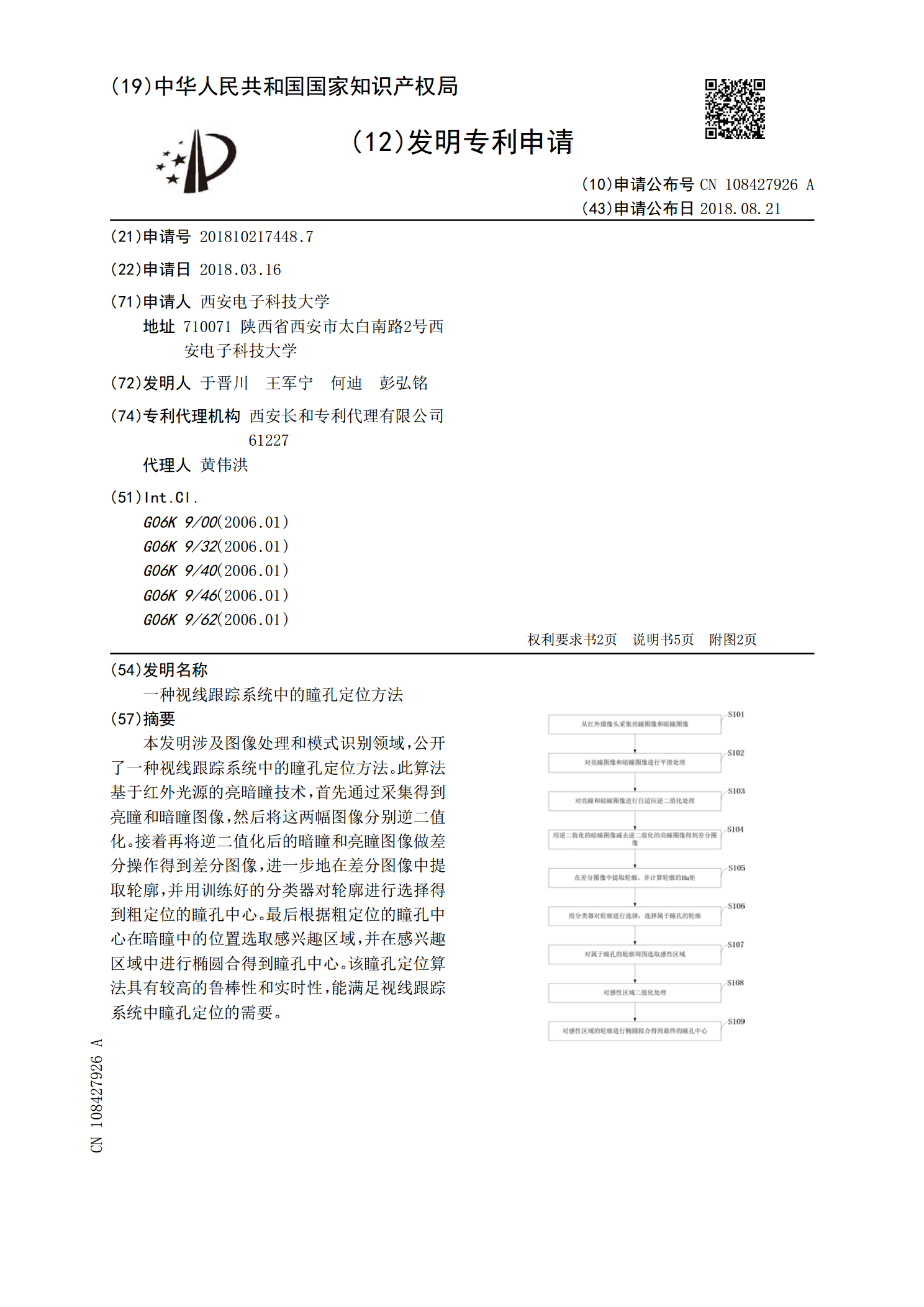
本发明涉及图像处理和模式识别领域,公开了一种视线跟踪系统中的瞳孔定位方法。此算法基于红外光源的亮暗瞳技术,首先通过采集得到亮瞳和暗瞳图像,然后将这两幅图像分别逆二值化。接着再将逆二值化后的暗瞳和亮瞳图像做差分操作得到差分图像,进一步地在差分图像中提取轮廓,并用训练好的分类器对轮廓进行选择得到粗定位的瞳孔中心。最后根据粗定位的瞳孔中心在暗瞳中的位置选取感兴趣区域,并在感兴趣区域中进行椭圆合得到瞳孔中心。该瞳孔定位算法具有较高的鲁棒性和实时性,能满足视线跟踪系统中瞳孔定位的需要。

视线跟踪系统中的标定技术和瞳孔定位问题研究.docx
视线跟踪系统中的标定技术和瞳孔定位问题研究摘要:视线跟踪系统是一种基于计算机视觉技术的眼动追踪设备,具有广泛的应用前景。本文主要分析视线跟踪系统中的标定技术和瞳孔定位问题。研究发现,标定技术能够准确地估计出摄像机和显示器的位置和朝向,但是在实际应用中需要考虑噪声和时间延迟等问题;瞳孔定位问题的解决需要结合瞳孔中心的方向向量和曲率信息进行优化,同时还需要考虑头部运动和瞳孔形态变化等因素。本文还对未来的研究方向进行了展望,包括结合深度学习、改进标定和瞳孔定位算法等方面。关键词:视线跟踪系统;标定技术;瞳孔定位

视线跟踪系统中的标定技术和瞳孔定位问题研究的综述报告.docx
视线跟踪系统中的标定技术和瞳孔定位问题研究的综述报告视线跟踪系统是一种常见的人机交互技术,它通过获取人眼在特定时间内的视线位置,以便对人的视觉注意力和兴趣进行研究,并为用户提供更好的控制交互界面的方式。其中,标定技术和瞳孔定位问题是视线跟踪系统中最为重要的两个方面。本文将就这两个方面进行一些综述。标定技术是视线跟踪系统中的重要环节之一。其主要目的是建立视线跟踪系统的坐标系,确保系统能够准确地确定人眼的视线位置以及对应的图像对应。一般来说,标定包括计算眼睛和屏幕之间的几何关系和那些参数,以便正确的将人眼的视

基于瞳孔空间形态的双眼视线跟踪方法.docx
基于瞳孔空间形态的双眼视线跟踪方法摘要本论文介绍了一种基于瞳孔空间形态的双眼视线跟踪方法。该方法基于双眼瞳孔中的形态信息来实现对用户视线的跟踪和定位。这种方法不需要使用额外的硬件设备,只需在普通摄像头和计算机上运行相应的软件即可实现视线跟踪。本文阐述了该方法的详细步骤和实现过程,并测试了该方法的准确性和稳定性。实验结果表明,该方法在具有一定空间限制的环境下能够准确地跟踪用户的视线,为人机交互提供了一种新的方法。关键词:双眼视线跟踪,瞳孔空间形态,人机交互。引言随着计算机技术的不断发展,人机交互技术也得到了

基于瞳孔空间形态的双眼视线跟踪方法.docx
基于瞳孔空间形态的双眼视线跟踪方法摘要双眼视线跟踪是计算机视觉和人机交互研究中的一个重要问题。本文提出了一种基于瞳孔空间形态的双眼视线跟踪方法。该方法通过分析瞳孔在空间上的形状变化,结合双眼瞳孔的位置信息,实现了对双眼视线的精确跟踪。实验结果表明,该方法的跟踪精度较高,可以满足实际应用需要。关键词:双眼视线跟踪;瞳孔空间形态;计算机视觉;人机交互AbstractBinoculargazetrackingisanimportantproblemincomputervisionandhuman-compute