
防止汽轮机过临界转速超调控制方法.pdf

雨星****萌娃

1/9

2/9
3/9
4/9
5/9

6/9

7/9

8/9
9/9
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
防止汽轮机过临界转速超调控制方法.pdf
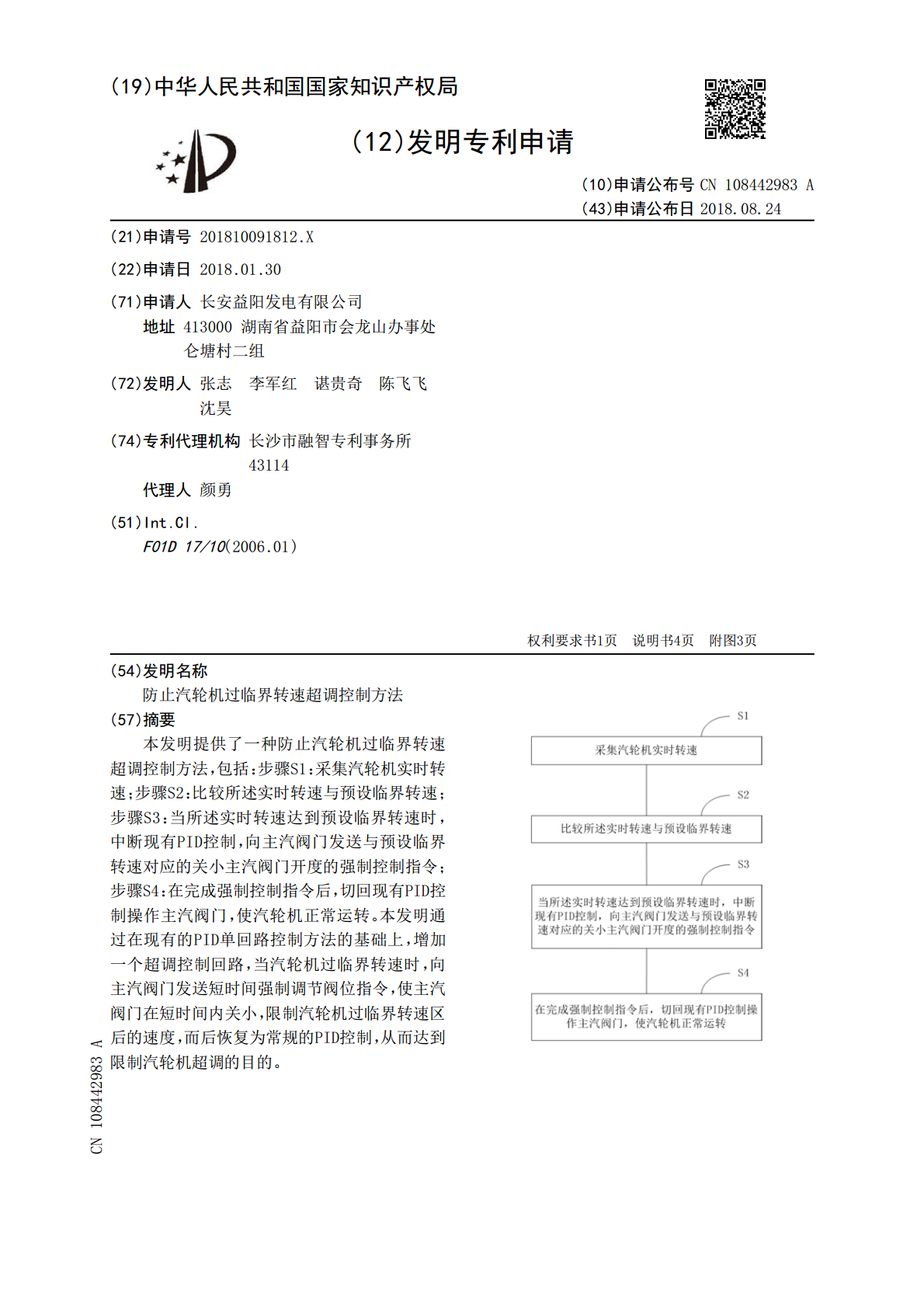
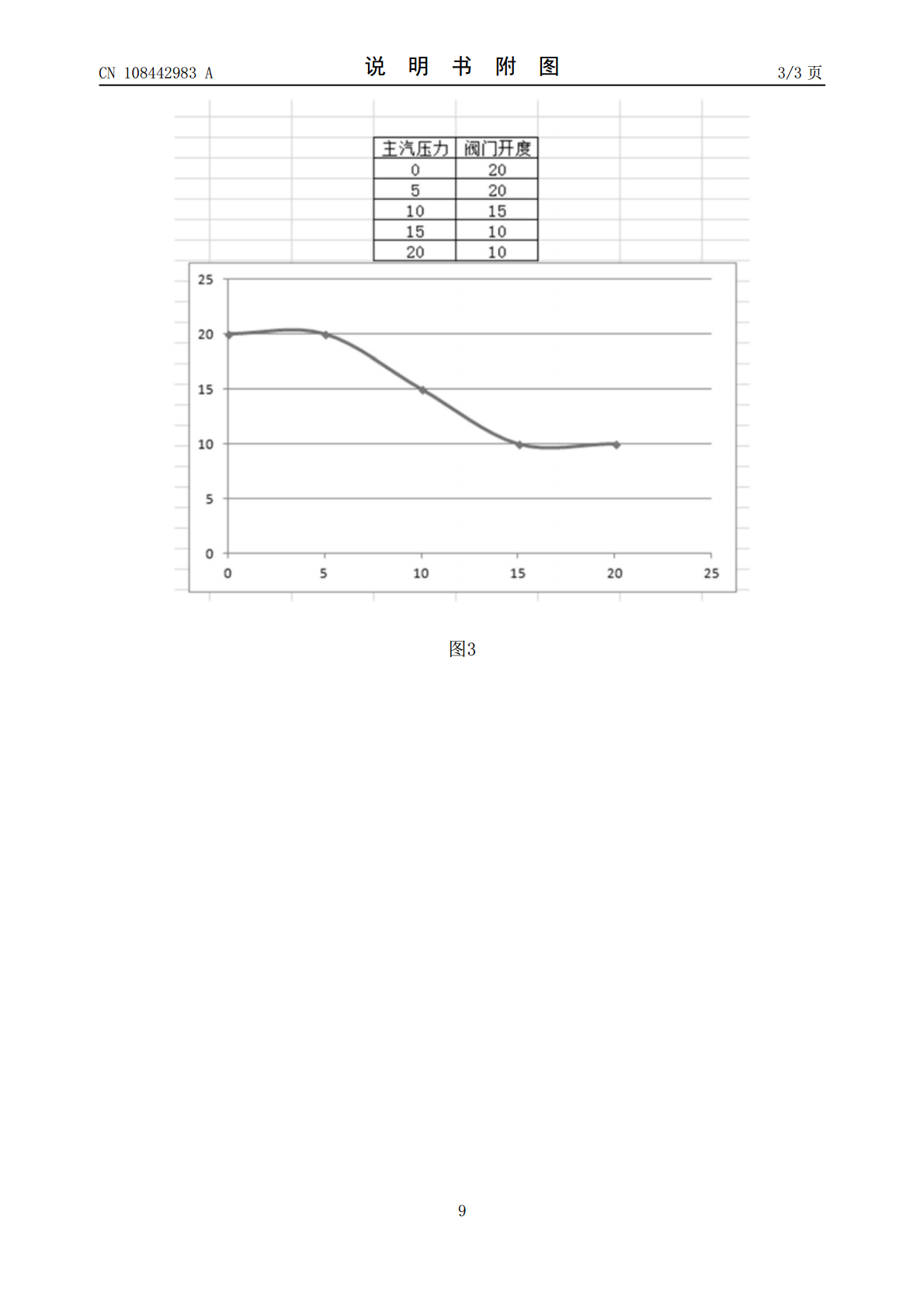
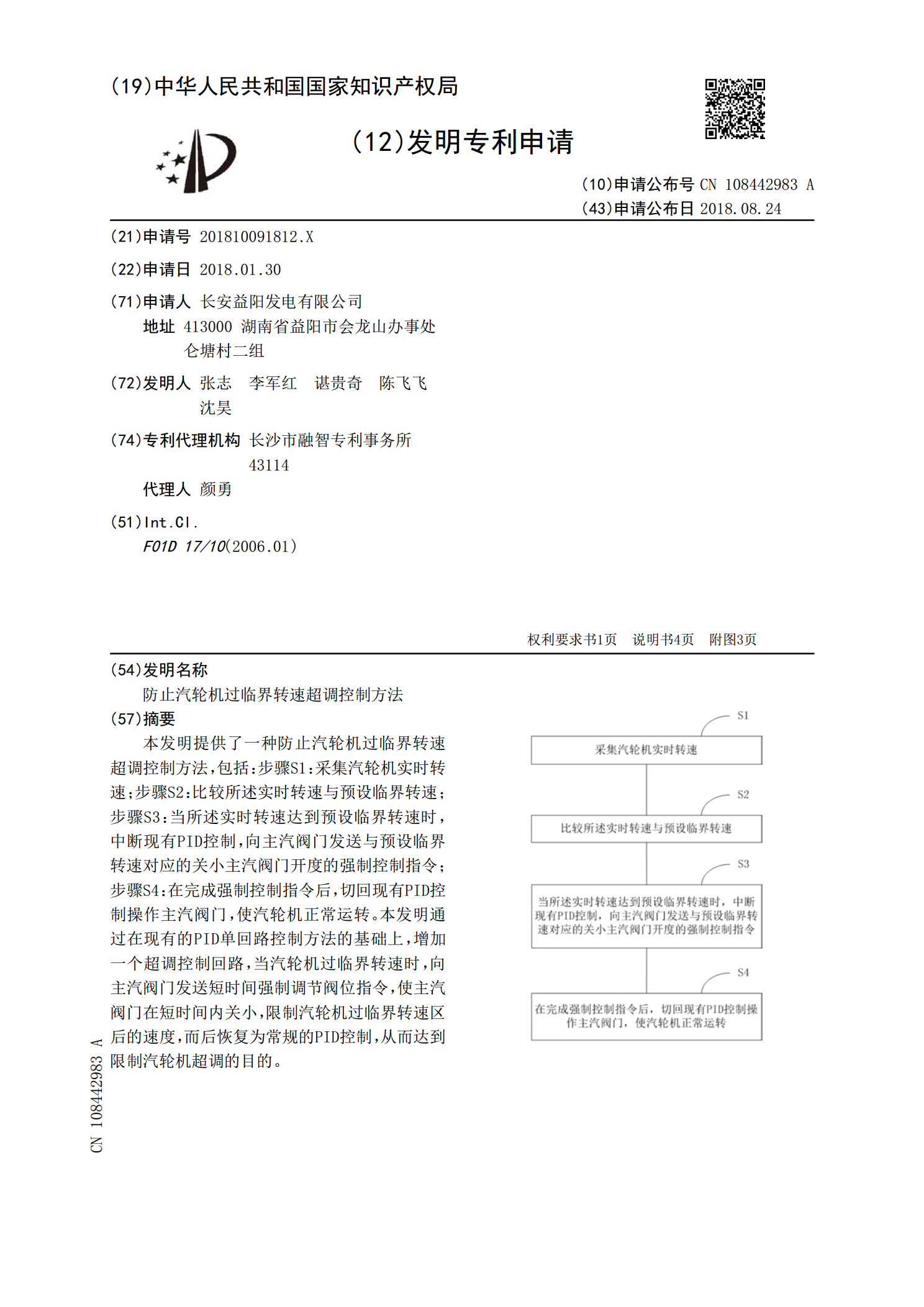
本发明提供了一种防止汽轮机过临界转速超调控制方法,包括:步骤S1:采集汽轮机实时转速;步骤S2:比较所述实时转速与预设临界转速;步骤S3:当所述实时转速达到预设临界转速时,中断现有PID控制,向主汽阀门发送与预设临界转速对应的关小主汽阀门开度的强制控制指令;步骤S4:在完成强制控制指令后,切回现有PID控制操作主汽阀门,使汽轮机正常运转。本发明通过在现有的PID单回路控制方法的基础上,增加一个超调控制回路,当汽轮机过临界转速时,向主汽阀门发送短时间强制调节阀位指令,使主汽阀门在短时间内关小,限制汽轮机过临

一种防止汽轮机转速超调的自动变升速率控制方法.pdf
本发明公开了一种防止汽轮机转速超调的自动变升速率控制方法,步骤包括:设置汽轮机的给定升速率K;构造汽轮机的升速率自动修正系数a,并乘以给定升速率作为实际升速率设定值K

超超临界汽轮机转速测量回路优化与改造.docx
超超临界汽轮机转速测量回路优化与改造标题:超超临界汽轮机转速测量回路的优化与改造摘要:超超临界汽轮机是一种高效、可靠且输出功率巨大的能源转换设备,其运行稳定性和可靠性对能源系统的有效运行至关重要。在超超临界汽轮机系统中,转速测量回路起着重要的作用,能够实时监测转速,提供关键的运行参数。然而,传统的转速测量回路存在一定的缺陷,不适应于超超临界汽轮机的工作要求,因此,本文将对转速测量回路进行优化与改造,以提高系统的准确性和稳定性。第一节:绪论1.1研究背景1.2研究目的和意义1.3本文的结构安排第二节:超超临

防止电厂机组汽轮机转速飞升的系统和方法.pdf
本发明公开了一种防止电厂机组汽轮机转速飞升的系统和一种防止电厂机组汽轮机转速飞升的方法。该系统包括:转速检测装置,用于检测汽轮机的当前转速;控制装置,与所述转速检测装置连接,用于将所检测的当前转速与预定转速进行比较,该控制装置还用于与连通电厂和电网的开关装置连接以检测该开关装置的状态、根据比较结果和所述开关装置的状态调整所述机组的初始负荷设定值或所述汽轮机的当前转速,由此能够避免由于并网信号不可靠所引起的汽轮机转速飞升问题,确保电厂机组的稳定性和安全性。

汽轮机转子临界转速实验研究.pdf
汽轮机转子临界转速实验研究潘宏刚;郑飞飞;夏永放;崔洁【摘要】转子临界转速的计算方法有很多种,但是计算结果与实际误差较大.通过转子临界转速实验测量装置,利用伯德图法、频谱分析法和李莎茹图法对转子的临界转速进行测量,分析并比较了3种测量方法的优缺点.实验结果表明,伯德图法对转子临界转速的测量结果较为准确,并能直观地反映出转子在不同转速时刻下对应的相位,为后期转子临界转速影响分析及其灵敏度分析打下基础.【期刊名称】《沈阳工程学院学报(自然科学版)》【年(卷),期】2016(012)004【总页数】5页(P31