
一种蠕动式管道疏堵清洗机器人.pdf

曦晨****22

1/10
2/10

3/10
4/10
5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种蠕动式管道疏堵清洗机器人.pdf
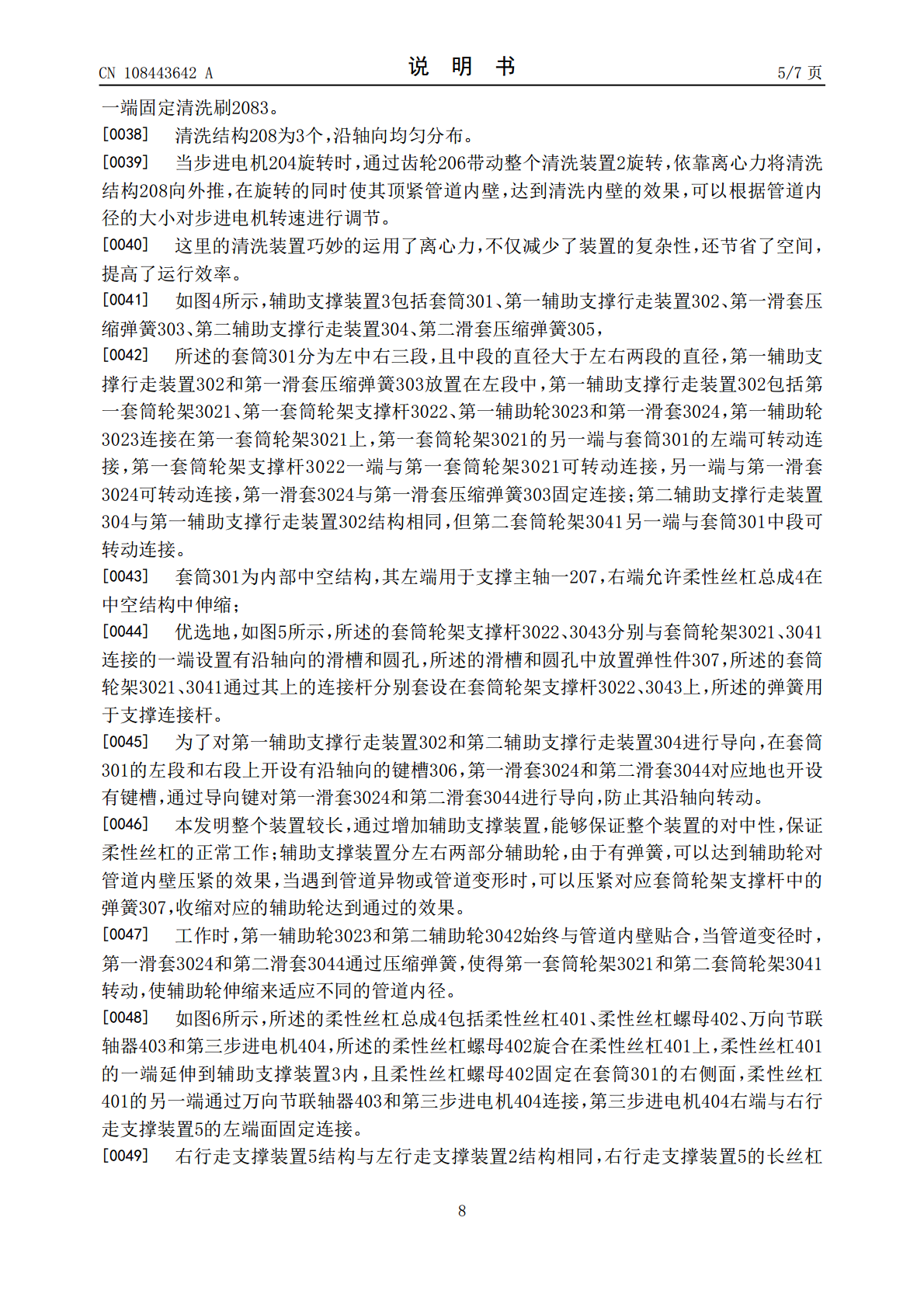
本发明公开一种蠕动式管道疏堵清洗机器人,该机器人沿轴向依次固定连接的左行走支撑装置、清洗装置、辅助支撑装置、柔性丝杠总成、右行走支撑装置和疏堵装置,左行走支撑装置和右行走支撑装置用于支撑并带动所述的机器人沿管道行走,清洗装置用于在行走过程中对管道进行清洗,疏堵装置用于疏通管道,辅助支撑装置用于对整个机器人提供辅助支撑。本发明的机器人采用蠕动式前进,避免了驱动装置前进过程中遇到管道异物或管道变形等情况时卡死、无法通过的情形,并且可沿长距离弯曲、变形管道前行,适用范围广泛;且能对变径管道实现自适应,遇到异物阻
一种蠕动式管道机器人.pdf
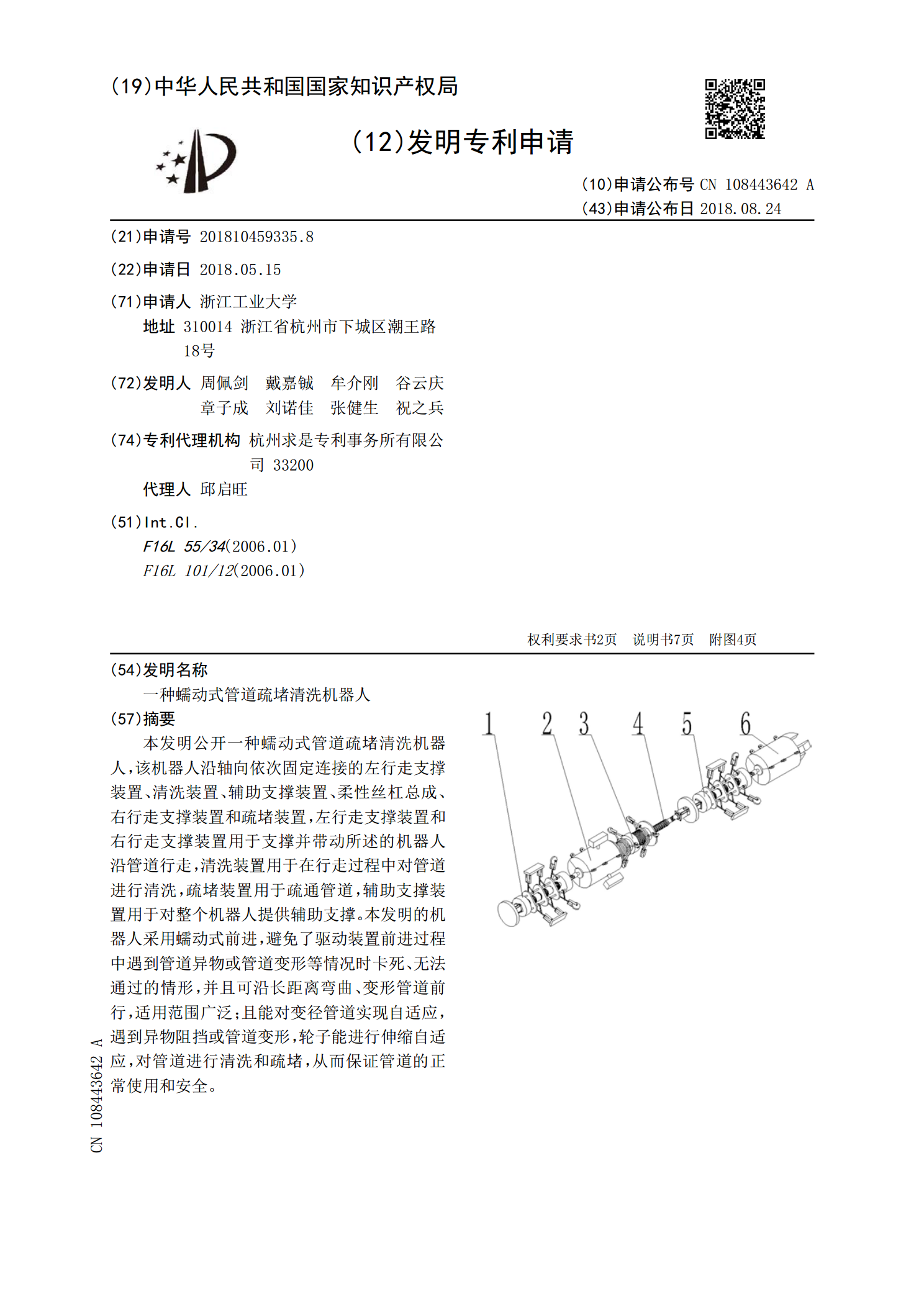
本发明涉及管道机器人机械制作技术领域,具体地说是一种蠕动式管道机器人,该机器人由左支撑机构、右支撑机构和中部驱动机构组成,特征在于左支撑机构和右支撑机构由滑轴、四组交叉铰接杆、滑套、锁紧螺母、预紧弹簧和滚轮组成,所述的交叉交接杆中两个支杆外端部设有滚轮锁紧组件,所述的滚轮锁紧组件由锁紧弹簧、锁紧磁性滑块和线圈组成,所述的中部驱动机构由内齿轮安装座、行星轮、曲柄、带动销、拉动框条和拉动杆组成,具有结构简单、适应弯管能力强、越障效果好等优点。
一种蠕动管道机器人的控制方法及蠕动管道机器人.pdf
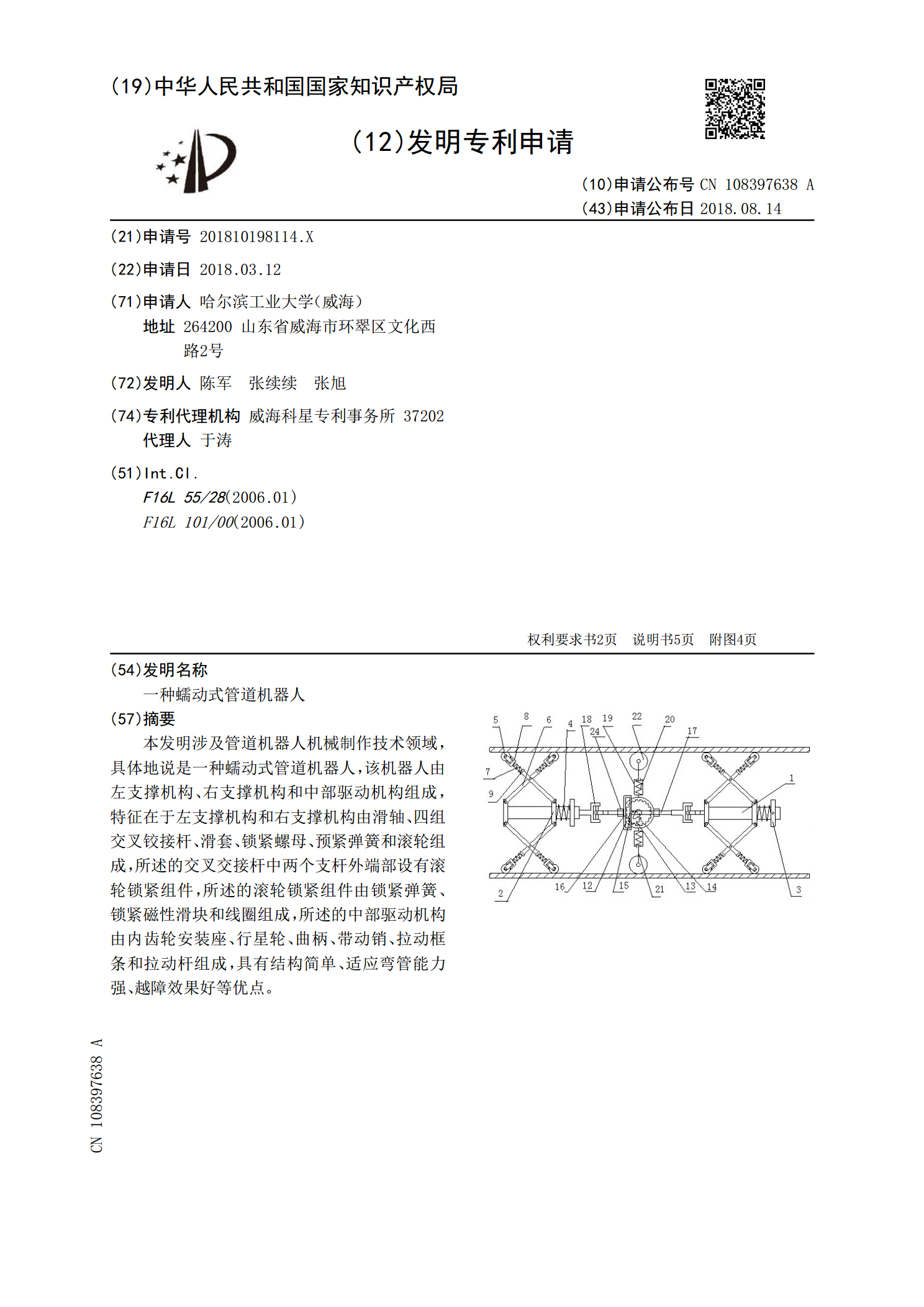
本发明涉及管道机器人技术领域,具体涉及一种蠕动管道机器人的控制方法及蠕动管道机器人,将蠕动管道机器人放入目标管道内,通过上位机向蠕动管道机器人发送初始化和运行命令,蠕动管道机器人内设置的DSP控制器收到指令,DSP控制器向蠕动管道机器人的驱动器、清淤器和支撑控制器发布指令,支撑控制器收到指令调整蠕动管道机器人的支撑架姿态,并适应管道的直径,驱动器驱动机器人进行移动,清淤器对管道进行清淤。本发明中通过上位机向蠕动管道机器人的DSP控制器下达指令,控制蠕动管道机器人在管道内移动,可在实现蠕动的过程中同时对管道
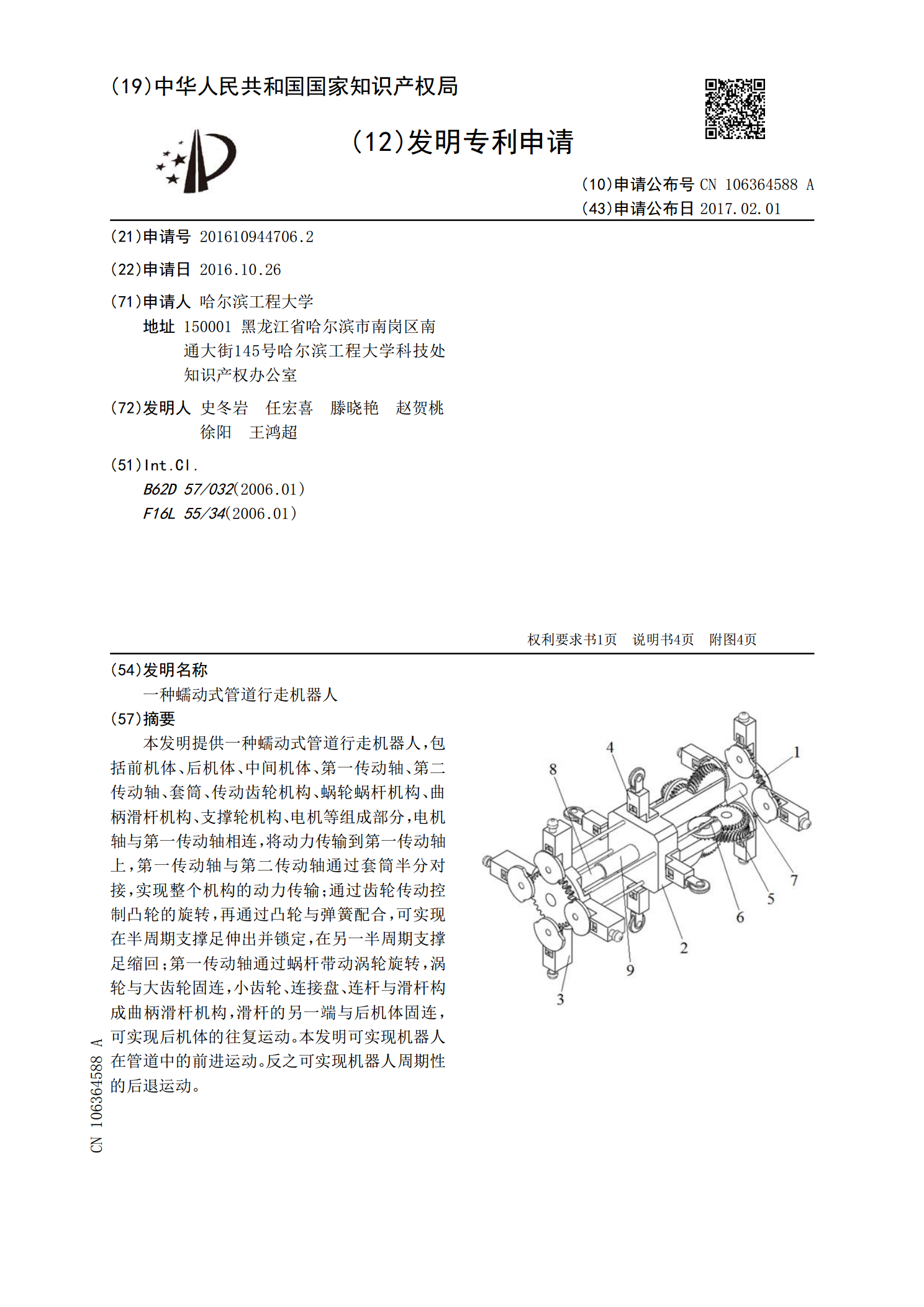
一种蠕动式管道行走机器人.pdf
本发明提供一种蠕动式管道行走机器人,包括前机体、后机体、中间机体、第一传动轴、第二传动轴、套筒、传动齿轮机构、蜗轮蜗杆机构、曲柄滑杆机构、支撑轮机构、电机等组成部分,电机轴与第一传动轴相连,将动力传输到第一传动轴上,第一传动轴与第二传动轴通过套筒半分对接,实现整个机构的动力传输;通过齿轮传动控制凸轮的旋转,再通过凸轮与弹簧配合,可实现在半周期支撑足伸出并锁定,在另一半周期支撑足缩回;第一传动轴通过蜗杆带动涡轮旋转,涡轮与大齿轮固连,小齿轮、连接盘、连杆与滑杆构成曲柄滑杆机构,滑杆的另一端与后机体固连,可实

一种蠕动式管道机器人行走机理研究.docx
一种蠕动式管道机器人行走机理研究摘要:对于一些管道内部环境比较恶劣、人工操作困难的管道,需要采用一些管道机器人来进行检测、维护等工作。本文介绍了一种蠕动式管道机器人行走机理,并对其进行了仿真实验。通过分析实验结果,验证了该机器人的行走机理的可行性和可靠性,为实现其在实际操作中的使用提供了理论基础。关键词:蠕动式;管道机器人;行走机理一、引言在目前的管道领域中,人们越来越依赖于管道机器人,其可以在管道内部完成检测、维护等各种任务。而如何让机器人在管道内部行走,一直是人们所关心的问题之一。本文主要介绍了一种蠕