
一种逐步逼近亚像素图像定位方法和系统.pdf

雨巷****凝海

1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种逐步逼近亚像素图像定位方法和系统.pdf
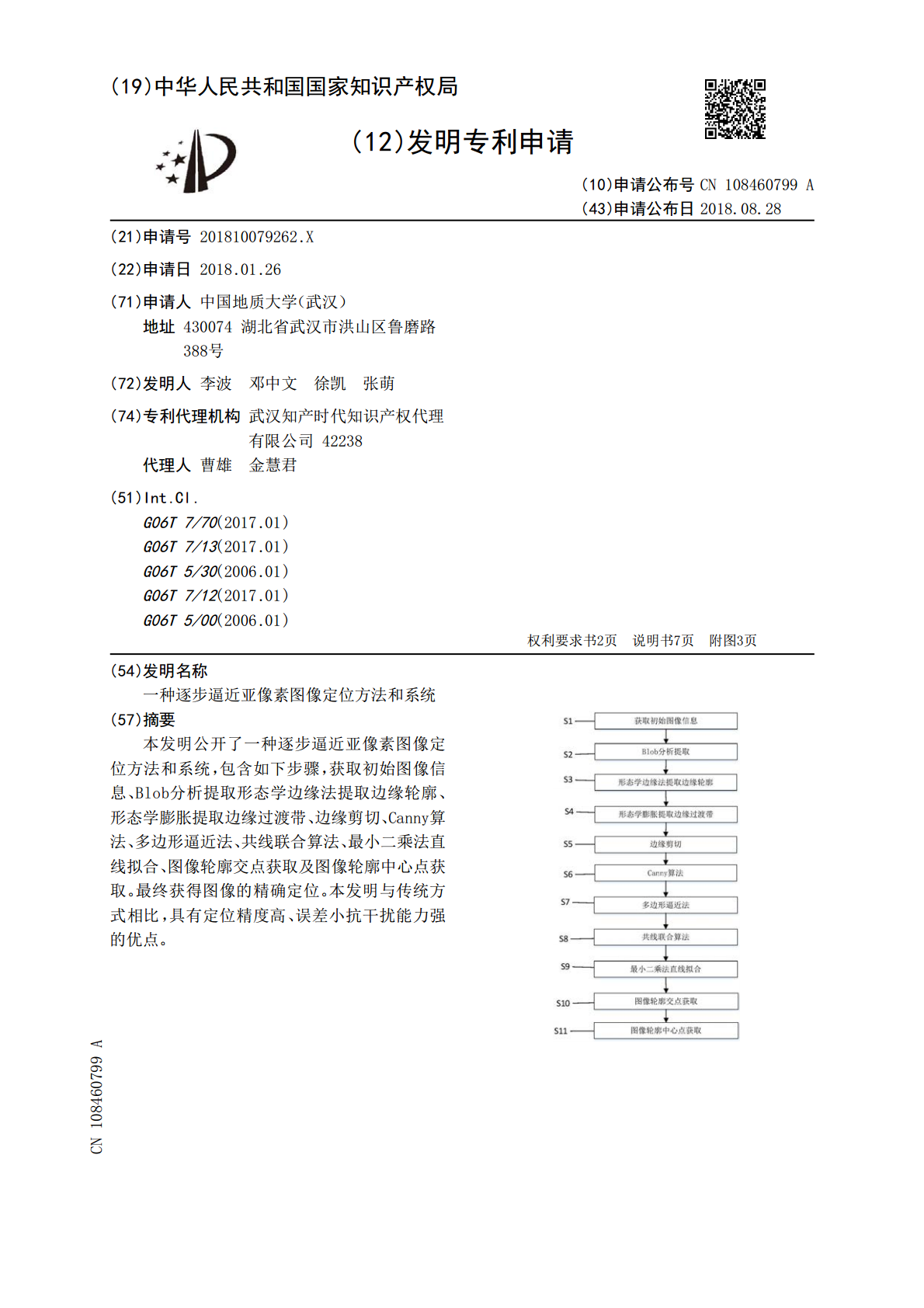
本发明公开了一种逐步逼近亚像素图像定位方法和系统,包含如下步骤,获取初始图像信息、Blob分析提取形态学边缘法提取边缘轮廓、形态学膨胀提取边缘过渡带、边缘剪切、Canny算法、多边形逼近法、共线联合算法、最小二乘法直线拟合、图像轮廓交点获取及图像轮廓中心点获取。最终获得图像的精确定位。本发明与传统方式相比,具有定位精度高、误差小抗干扰能力强的优点。
图像亚像素匹配定位方法、系统、设备及介质.pdf
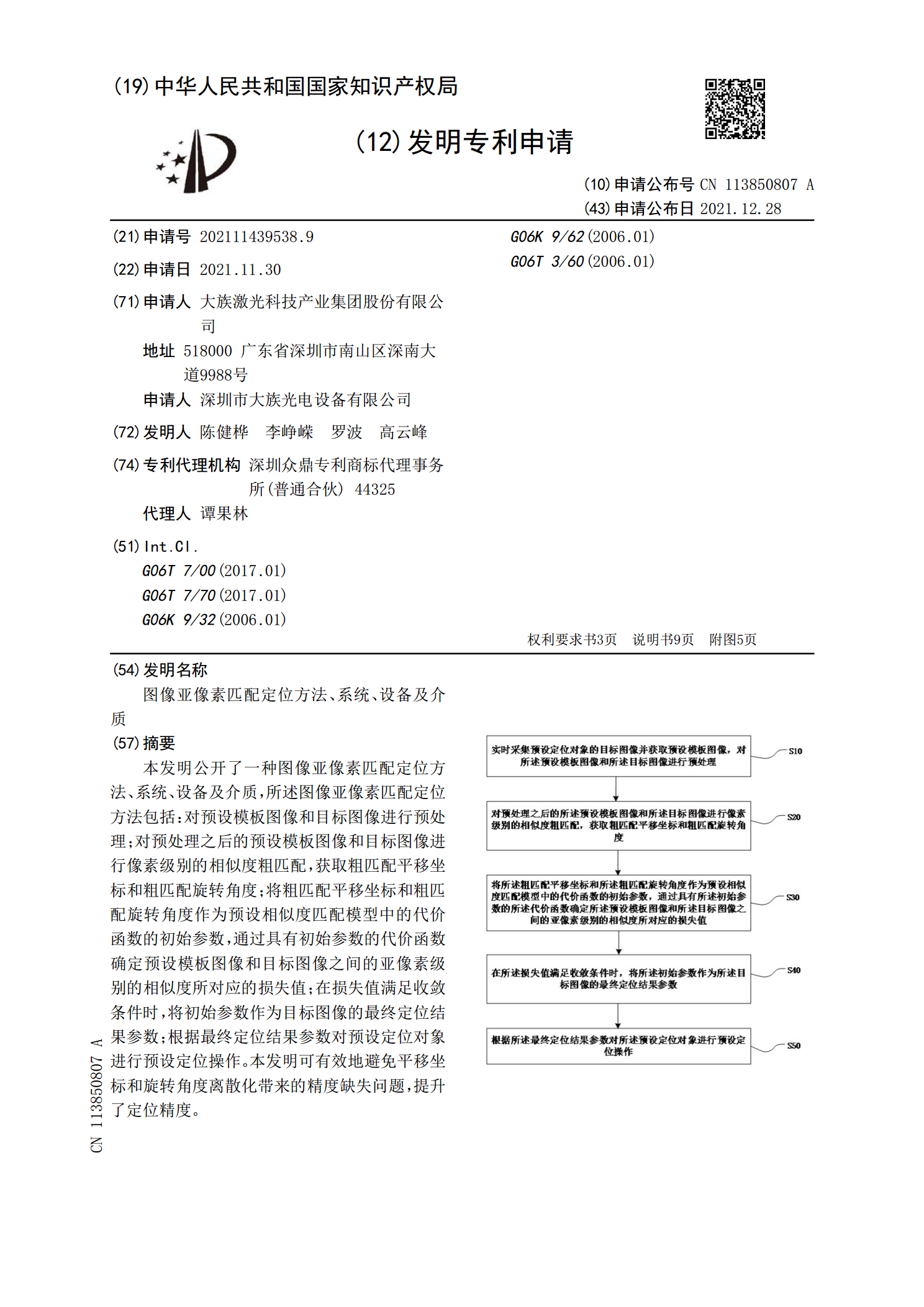
本发明公开了一种图像亚像素匹配定位方法、系统、设备及介质,所述图像亚像素匹配定位方法包括:对预设模板图像和目标图像进行预处理;对预处理之后的预设模板图像和目标图像进行像素级别的相似度粗匹配,获取粗匹配平移坐标和粗匹配旋转角度;将粗匹配平移坐标和粗匹配旋转角度作为预设相似度匹配模型中的代价函数的初始参数,通过具有初始参数的代价函数确定预设模板图像和目标图像之间的亚像素级别的相似度所对应的损失值;在损失值满足收敛条件时,将初始参数作为目标图像的最终定位结果参数;根据最终定位结果参数对预设定位对象进行预设定位操

一种基于亚像素定位算法的红外图像边缘高精度检测定位方法.pdf
本发明公开了一种基于亚像素定位算法的红外图像边缘高精度检测定位方法,首先,对采集的红外图像进行均值滤波,然后,用Sobel算子进行边缘粗定位,再去除图像的小连通域,减小杂散点对后续亚像素边缘精确定位的干扰,最后,用Zernike矩法对红外图像进行亚像素级边缘高精度检测与定位,得到红外图像的边缘信息。本方法实现了红外图像边缘高精度检测与定位,与传统的边缘检测算法相比,定位精度更高,稳定性更好,解决了传统的边缘检测算法应用于红外图像时,不能很好的抑制噪声,容易出现边缘丢失、伪边缘的问题。

基于互相关的图像匹配亚像素定位.docx
基于互相关的图像匹配亚像素定位一、引言在现代图像处理技术中,图像匹配是最重要的基础研究之一。它广泛应用于计算机视觉、机器人等领域,如目标检测、物体识别、医学诊断等方面。近年来,随着计算机与图像处理技术的飞速发展,基于互相关的图像匹配亚像素定位得到了广泛应用。二、互相关的图像匹配互相关的图像匹配是一种基于灰度值的图像匹配算法。其基本原理是:将参考图像和目标图像分别转换为灰度图像,然后通过计算两幅图像的灰度相关系数,在图像中找到匹配像素。互相关的图像匹配算法可以分为两个步骤:首先,通过采用文字平移算法或者快速

一种图像定位方法、系统和装置.pdf
本发明公开一种图像定位方法、装置和系统,用以解决现有技术中图像定位处理存在定位结果不准确、精度低的问题。该方法包括:车辆中的图像定位装置接收来自于所述车辆的图像生成设备获取的驾驶环境的至少一帧实时图像数据;对所述至少一帧实时图像数据进行语义分割,得到至少一帧语义标签图像数据;查找并获取预存的与所述至少一帧语义标签图像数据对应的、所述驾驶环境的至少一帧基线语义标签数据,所述基线语义标签图像数据具有对应的所述驾驶环境的地图数据;将所述至少一帧语义标签图像数据与所述至少一帧基线语义标签数据进行对比;根据对比结果