
一种基于群分解的旋转机械复合故障诊断方法.pdf

慧颖****23


1/10
2/10

3/10
4/10

5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于群分解的旋转机械复合故障诊断方法.pdf
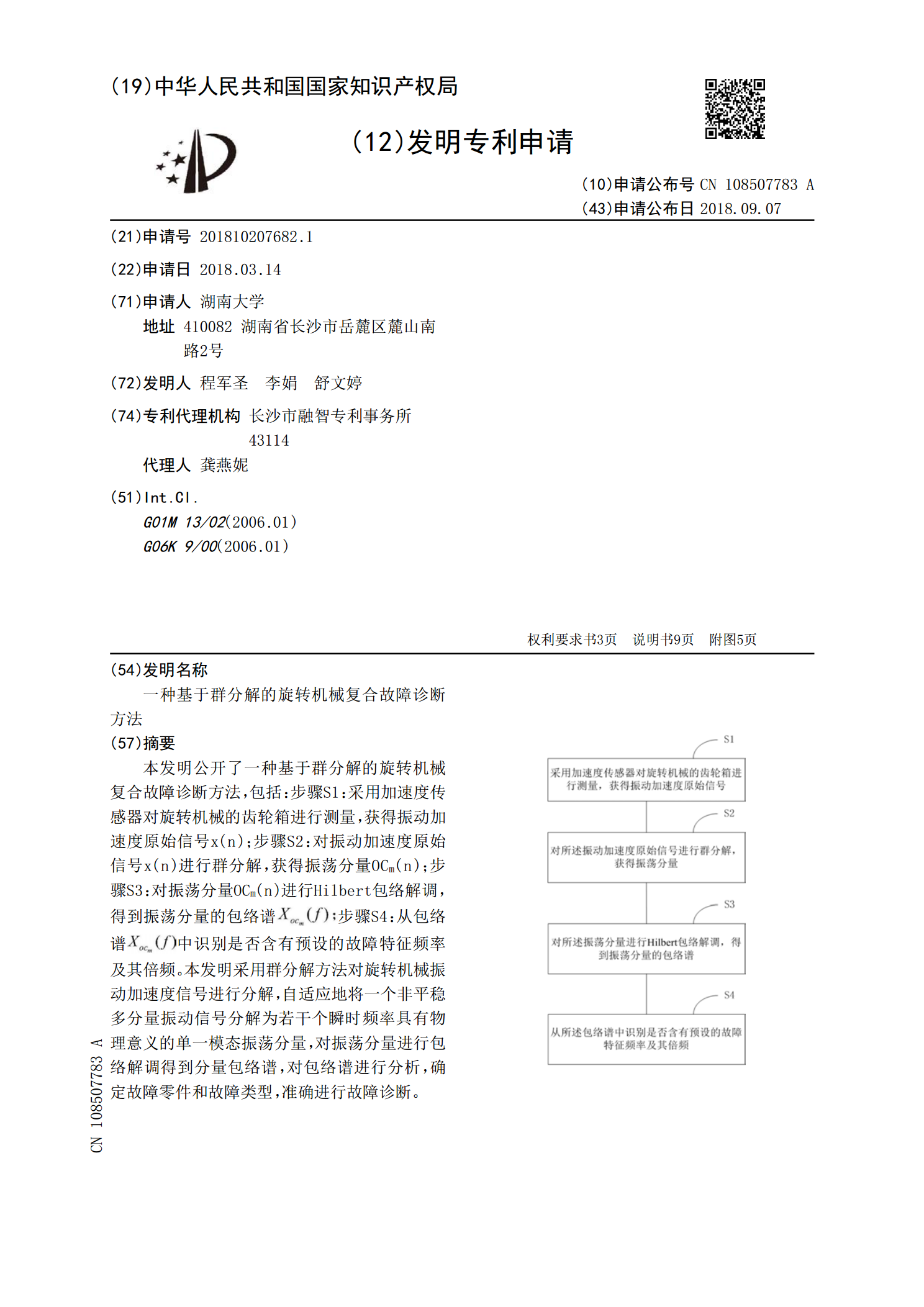
本发明公开了一种基于群分解的旋转机械复合故障诊断方法,包括:步骤S1:采用加速度传感器对旋转机械的齿轮箱进行测量,获得振动加速度原始信号x(n);步骤S2:对振动加速度原始信号x(n)进行群分解,获得振荡分量OC
一种基于G-P奇异谱分解的旋转机械复合故障诊断方法.pdf
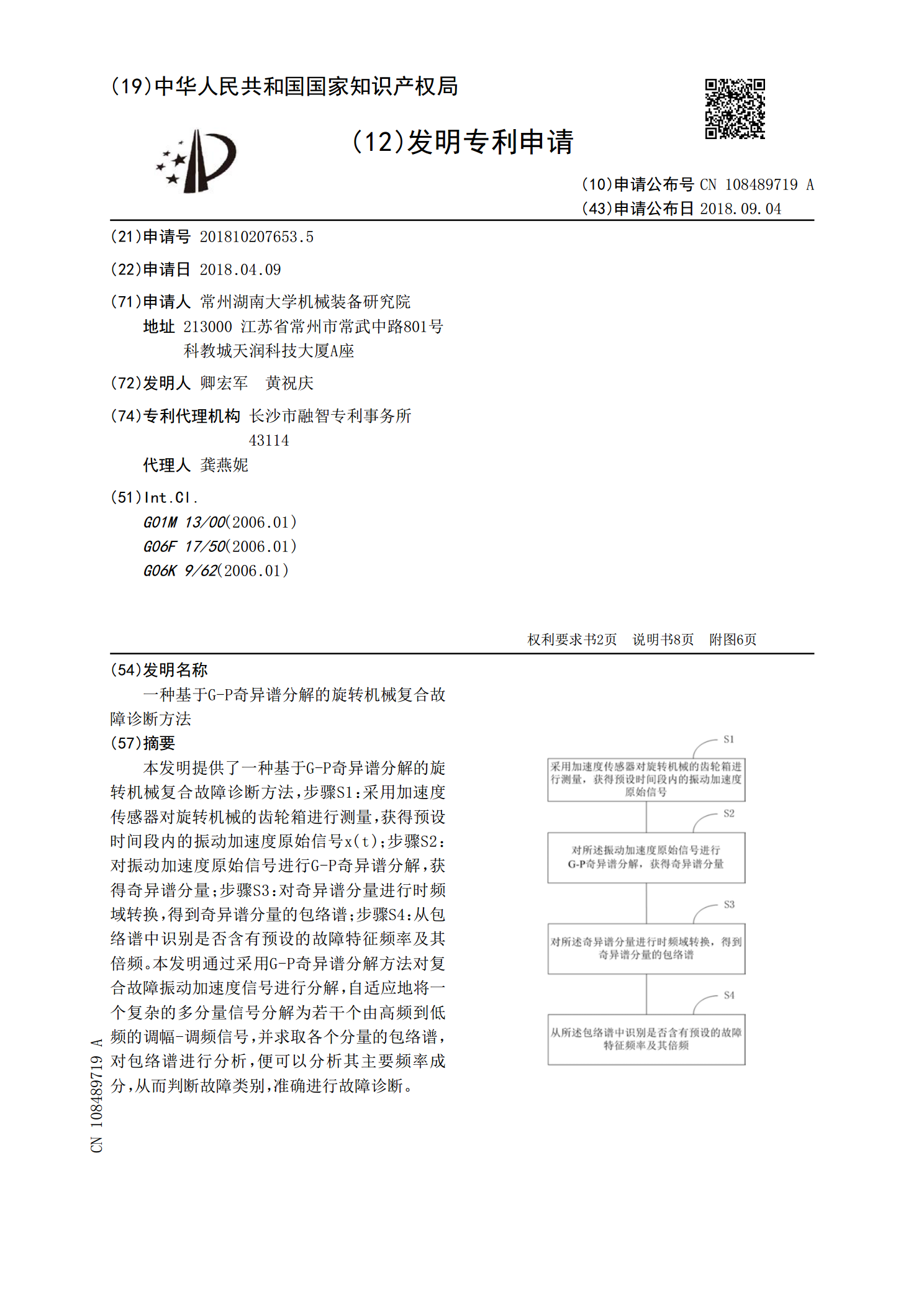
本发明提供了一种基于G‑P奇异谱分解的旋转机械复合故障诊断方法,步骤S1:采用加速度传感器对旋转机械的齿轮箱进行测量,获得预设时间段内的振动加速度原始信号x(t);步骤S2:对振动加速度原始信号进行G‑P奇异谱分解,获得奇异谱分量;步骤S3:对奇异谱分量进行时频域转换,得到奇异谱分量的包络谱;步骤S4:从包络谱中识别是否含有预设的故障特征频率及其倍频。本发明通过采用G‑P奇异谱分解方法对复合故障振动加速度信号进行分解,自适应地将一个复杂的多分量信号分解为若干个由高频到低频的调幅‑调频信号,并求取各个分量的

基于非负矩阵分解的机械复合故障诊断方法研究.docx
基于非负矩阵分解的机械复合故障诊断方法研究基于非负矩阵分解的机械复合故障诊断方法研究摘要:机械复合故障诊断是工程领域中重要的研究课题之一,对于提高设备的可靠性和故障诊断的准确性具有重要意义。本文提出了一种基于非负矩阵分解的机械复合故障诊断方法,通过对机械复合故障数据进行分解和重构,实现对故障模式的识别和分析。实验结果表明,所提出的方法能够有效地诊断机械复合故障,具有较高的准确性和稳定性。1.引言机械设备在运行过程中会发生各种各样的故障,这些故障往往是由多个因素引起的,并且表现出复杂的故障模式。为了提高设备

基于经验模态分解的旋转机械故障诊断方法研究.docx
基于经验模态分解的旋转机械故障诊断方法研究标题:基于经验模态分解的旋转机械故障诊断方法研究摘要:旋转机械的故障诊断对于确保其正常运行和延长使用寿命具有重要意义。本论文提出一种基于经验模态分解(EMD)的旋转机械故障诊断方法,该方法通过将信号分解为一组具有不同频率和振幅的固有模态函数(IMF)来分析旋转机械的故障,以实现故障特征提取和诊断。本文将介绍EMD的基本原理和流程,并详细描述其在旋转机械故障诊断中的应用。此外,本文还介绍了一些常用的故障特征提取方法,并结合实例分析了EMD方法在旋转机械故障诊断中的应

基于多元经验模态分解的旋转机械早期故障诊断方法.docx
基于多元经验模态分解的旋转机械早期故障诊断方法标题:基于多元经验模态分解的旋转机械早期故障诊断方法摘要:随着工业化的快速发展,旋转机械在工业中扮演着重要的角色。然而,由于长期运行和高负载工作环境的影响,旋转机械产生故障的风险也相应增加。因此,早期故障诊断方法对于确保旋转机械的可靠性、安全性和高效性具有重要意义。本论文介绍了基于多元经验模态分解(MEMD)的旋转机械早期故障诊断方法。通过对机械振动信号进行多元经验模态分解,可以有效地提取出机械故障特征,并识别早期故障状态,从而实现快速、准确的故障诊断。关键词