
一种供变电站自动化智能巡检装置.pdf

雨巷****凝海

1/7

2/7

3/7
4/7

5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种供变电站自动化智能巡检装置.pdf
本发明公开了一种供变电站自动化智能巡检装置,一种供变电站自动化智能巡检装置,包括车体、设置在车体下方的行走轮、设置在车体内部的动力源、分别设置在车体内的PLC控制器和通讯模块、固定在车体上方的巡检机构、铺设在车体下方的柔性感应卷材以及设置在车体底部的感应定位组件。本发明具备结构简单、操作方便及可靠的特点,灵活的适应各类巡检任务,利于电网安全。柔性感应卷材提供了精确定位和在线连续交叉巡检的条件,使变电站自动巡检成为可能,节省人力,避免了高压作业,在无人变电站可以放心使用,稳定性高;巡检机的升降机构保证机器人

一种变电站智能运维自主巡检装置.pdf
本实用新型公开了一种变电站智能运维自主巡检装置,包括遥控车底座,所述遥控车底座上端面固定连接有保护箱,所述保护箱上端面中部设有出口,所述保护箱内腔设置有闭合机构,所述保护箱内腔底部设置有巡检机构,本实用新型涉及变电站巡检设备领域,解决了现有的不便对巡检用的摄像头就行防护,导致摄像头长期暴露在外面容易受到外力撞击导致损坏,且使用时不便对巡检用的摄像头角度进行多方位的调节的问题。
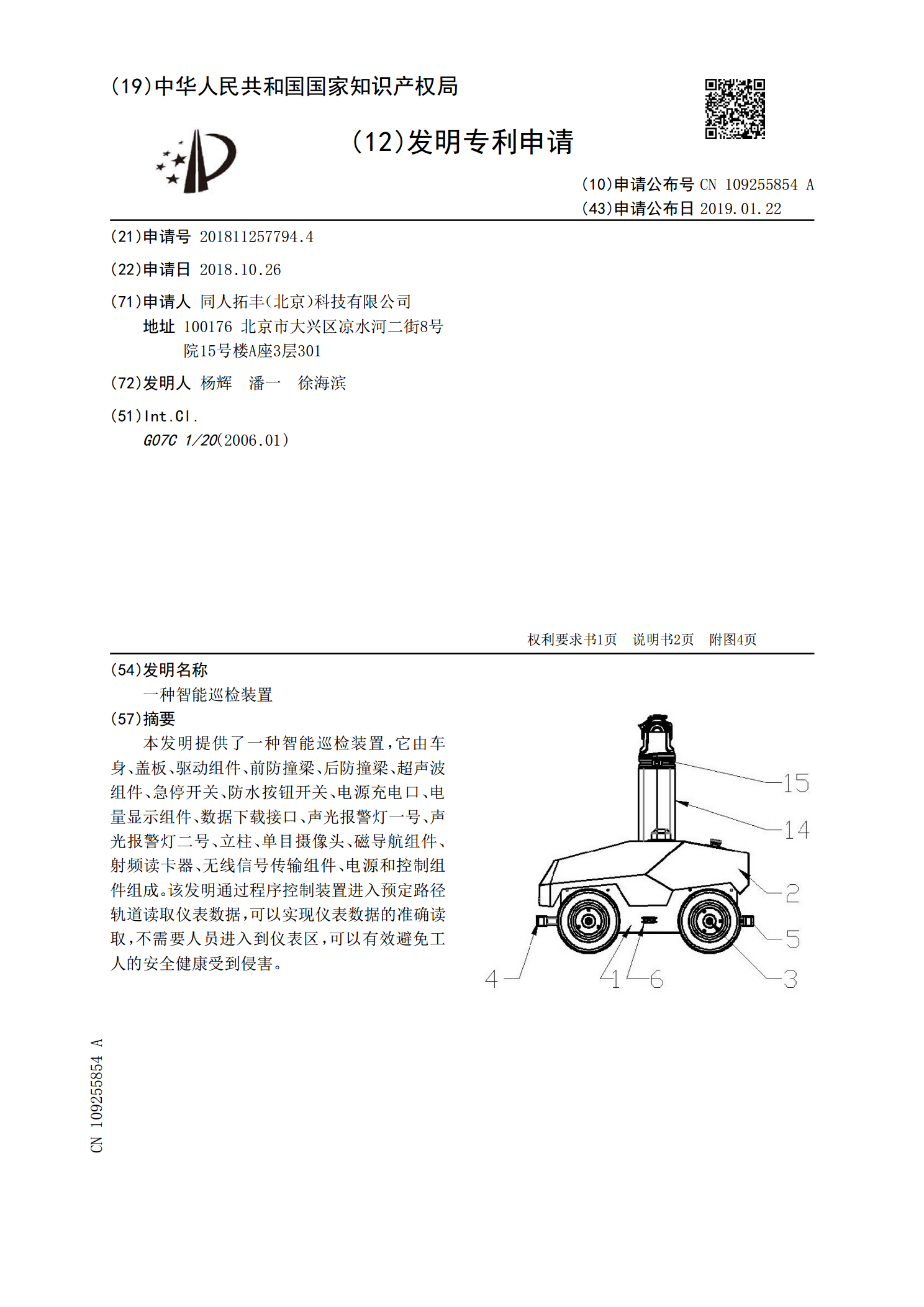
一种智能巡检装置.pdf
本发明提供了一种智能巡检装置,它由车身、盖板、驱动组件、前防撞梁、后防撞梁、超声波组件、急停开关、防水按钮开关、电源充电口、电量显示组件、数据下载接口、声光报警灯一号、声光报警灯二号、立柱、单目摄像头、磁导航组件、射频读卡器、无线信号传输组件、电源和控制组件组成。该发明通过程序控制装置进入预定路径轨道读取仪表数据,可以实现仪表数据的准确读取,不需要人员进入到仪表区,可以有效避免工人的安全健康受到侵害。
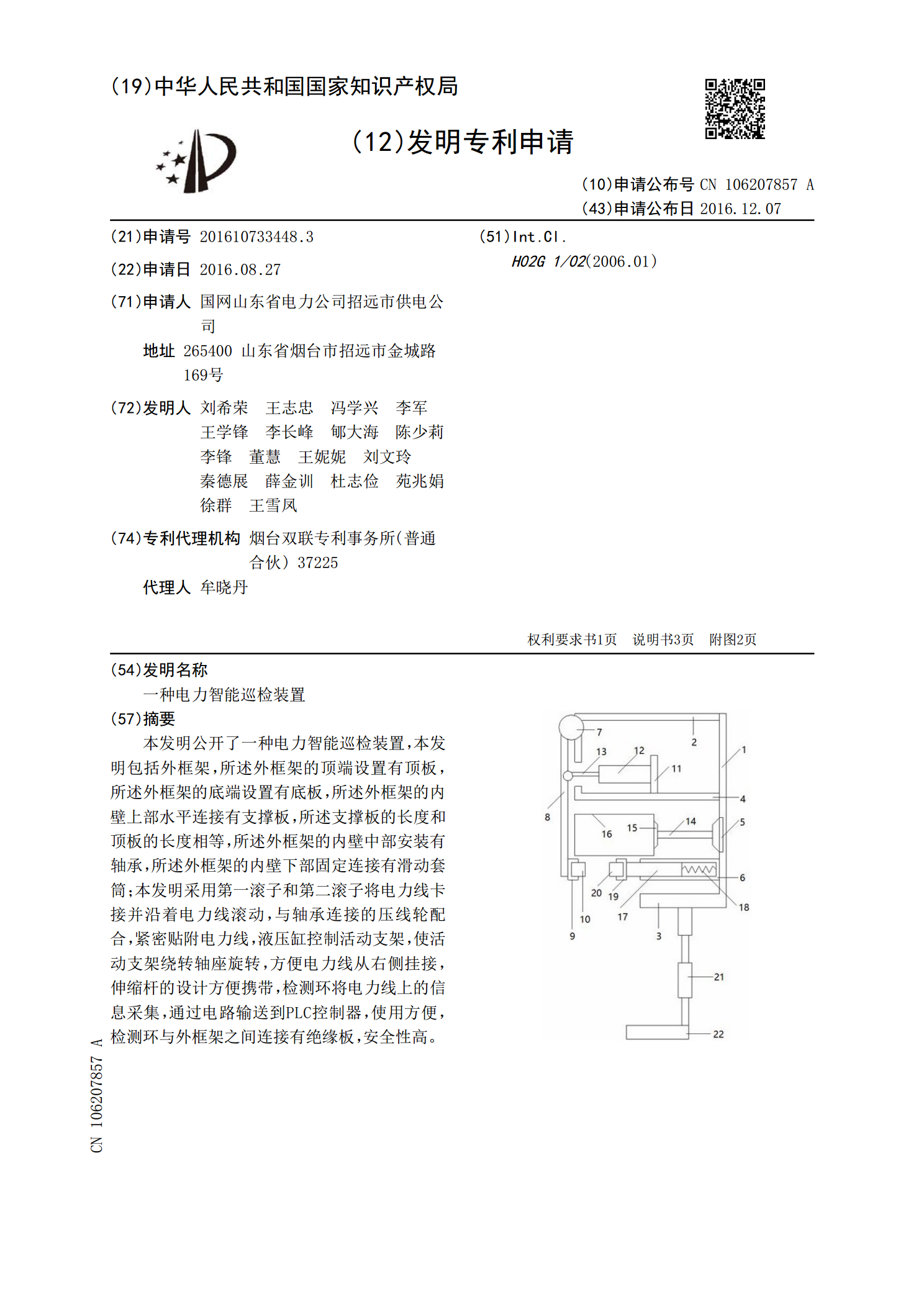
一种电力智能巡检装置.pdf
本发明公开了一种电力智能巡检装置,本发明包括外框架,所述外框架的顶端设置有顶板,所述外框架的底端设置有底板,所述外框架的内壁上部水平连接有支撑板,所述支撑板的长度和顶板的长度相等,所述外框架的内壁中部安装有轴承,所述外框架的内壁下部固定连接有滑动套筒;本发明采用第一滚子和第二滚子将电力线卡接并沿着电力线滚动,与轴承连接的压线轮配合,紧密贴附电力线,液压缸控制活动支架,使活动支架绕转轴座旋转,方便电力线从右侧挂接,伸缩杆的设计方便携带,检测环将电力线上的信息采集,通过电路输送到PLC控制器,使用方便,检测环

变电站综合自动化智能装置.ppt
第六章智能装置6.1电压、无功综合自动控制装置6.1电压、无功综合自动控制装置6.1电压、无功综合自动控制装置6.1电压、无功综合自动化控制装置6.1电压、无功综合自动化控制装置6.1电压、无功综合自动化控制装置6.1电压、无功综合自动化控制装置变电站10kV系统电压无功综合控制装置简介6.1电压、无功综合自动化控制装置6.2备用电源自动投入装置图6-6备用电源的配置形式(a)明备用(b)暗备用之一(c)暗备用之二6.2备用电源自动投入装置(AAT/BZT)6.2备用电源自动投入装置(AAT/BZT)6.