
平行轴内啮合传动的凸-平啮合纯滚动齿轮机构.pdf

涵蓄****09


1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

平行轴内啮合传动的平-凸啮合纯滚动齿轮机构.pdf
本发明公开平行轴内啮合传动的平‑凸啮合纯滚动齿轮机构及其设计方法,所述平‑凸内啮合纯滚动齿轮机构包括轴线平行的小轮和大齿圈组成,小轮圆柱体外表面均布有螺旋梯形槽,大齿圈圆柱体内表面均布有螺旋圆弧齿,螺旋圆弧齿和螺旋梯形槽配合,螺旋圆弧齿和螺旋梯形槽的结构由纯滚动的啮合线参数方程和重合度、传动比等参数共同确定;安装时使螺旋圆弧齿和螺旋梯形槽啮合,在驱动器带动下小轮和大齿圈旋转,实现两轴间的传动;本发明公开的设计方法可用于平行轴内啮合传动的纯滚动齿轮机构设计,具有设计简单,易于加工,传动效率高、重合度大、承载
平行轴内啮合传动的凸-平啮合纯滚动齿轮机构.pdf
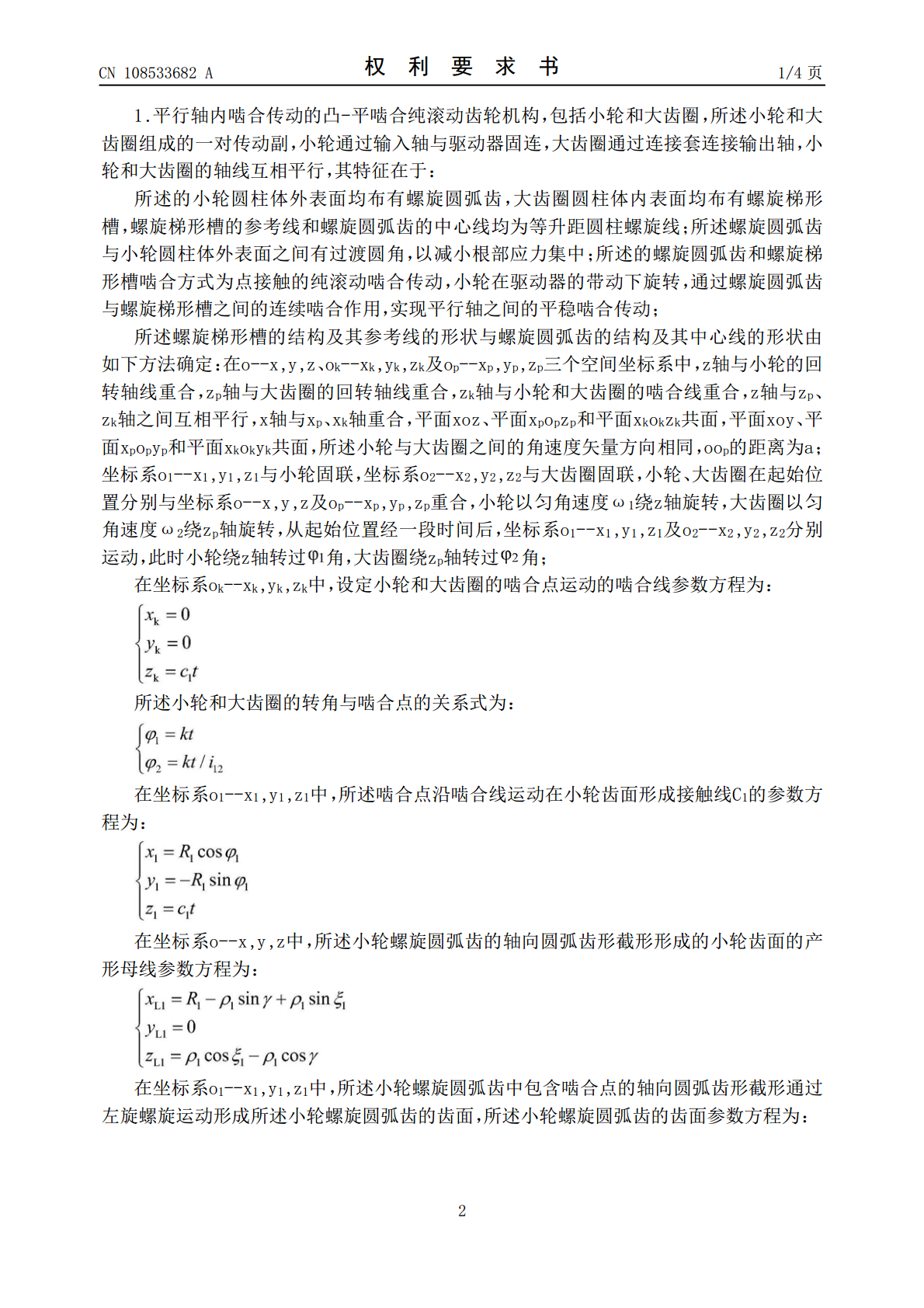
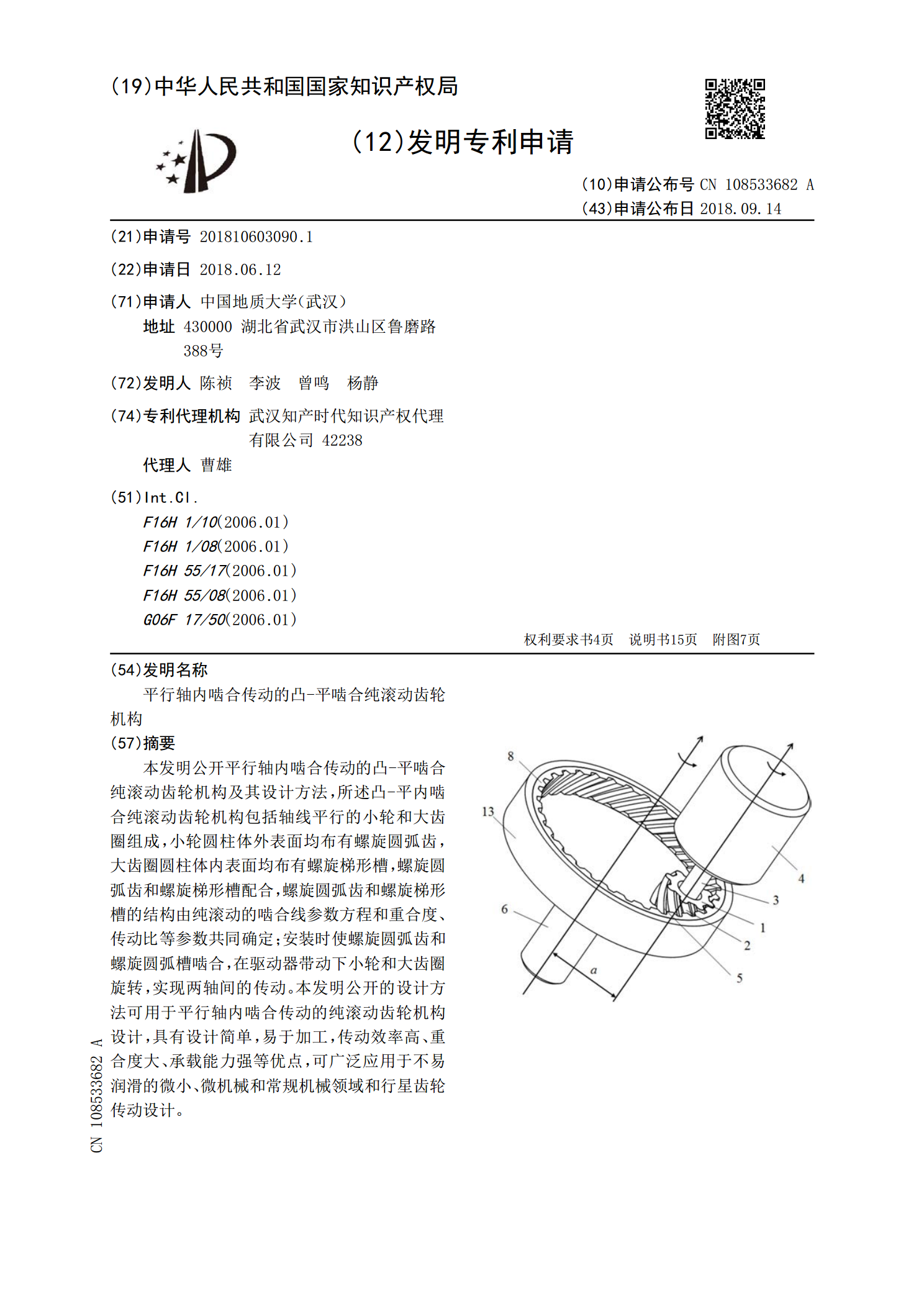
本发明公开平行轴内啮合传动的凸‑平啮合纯滚动齿轮机构及其设计方法,所述凸‑平内啮合纯滚动齿轮机构包括轴线平行的小轮和大齿圈组成,小轮圆柱体外表面均布有螺旋圆弧齿,大齿圈圆柱体内表面均布有螺旋梯形槽,螺旋圆弧齿和螺旋梯形槽配合,螺旋圆弧齿和螺旋梯形槽的结构由纯滚动的啮合线参数方程和重合度、传动比等参数共同确定;安装时使螺旋圆弧齿和螺旋圆弧槽啮合,在驱动器带动下小轮和大齿圈旋转,实现两轴间的传动。本发明公开的设计方法可用于平行轴内啮合传动的纯滚动齿轮机构设计,具有设计简单,易于加工,传动效率高、重合度大、承载
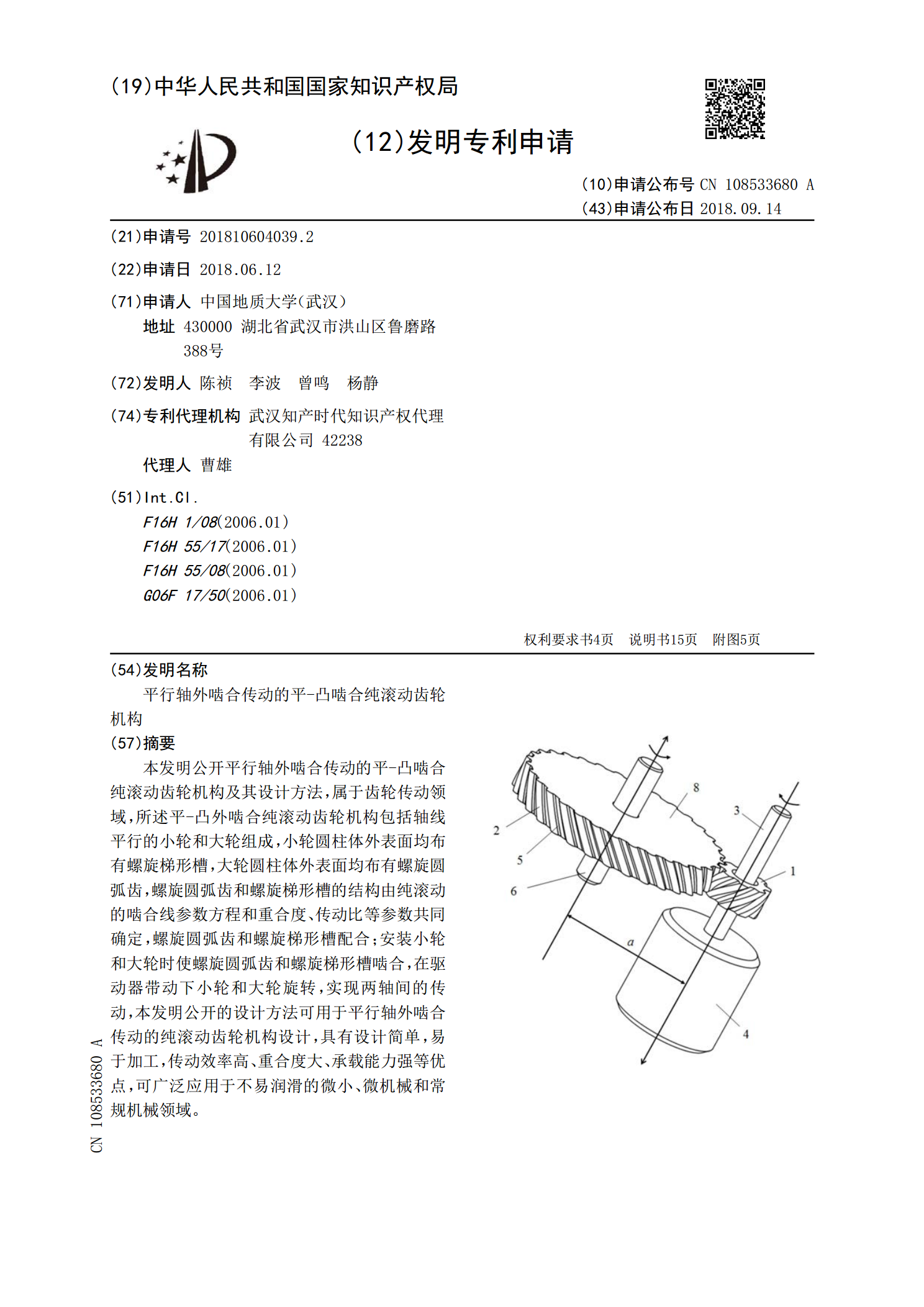
平行轴外啮合传动的平-凸啮合纯滚动齿轮机构.pdf
本发明公开平行轴外啮合传动的平‑凸啮合纯滚动齿轮机构及其设计方法,属于齿轮传动领域,所述平‑凸外啮合纯滚动齿轮机构包括轴线平行的小轮和大轮组成,小轮圆柱体外表面均布有螺旋梯形槽,大轮圆柱体外表面均布有螺旋圆弧齿,螺旋圆弧齿和螺旋梯形槽的结构由纯滚动的啮合线参数方程和重合度、传动比等参数共同确定,螺旋圆弧齿和螺旋梯形槽配合;安装小轮和大轮时使螺旋圆弧齿和螺旋梯形槽啮合,在驱动器带动下小轮和大轮旋转,实现两轴间的传动,本发明公开的设计方法可用于平行轴外啮合传动的纯滚动齿轮机构设计,具有设计简单,易于加工,传动
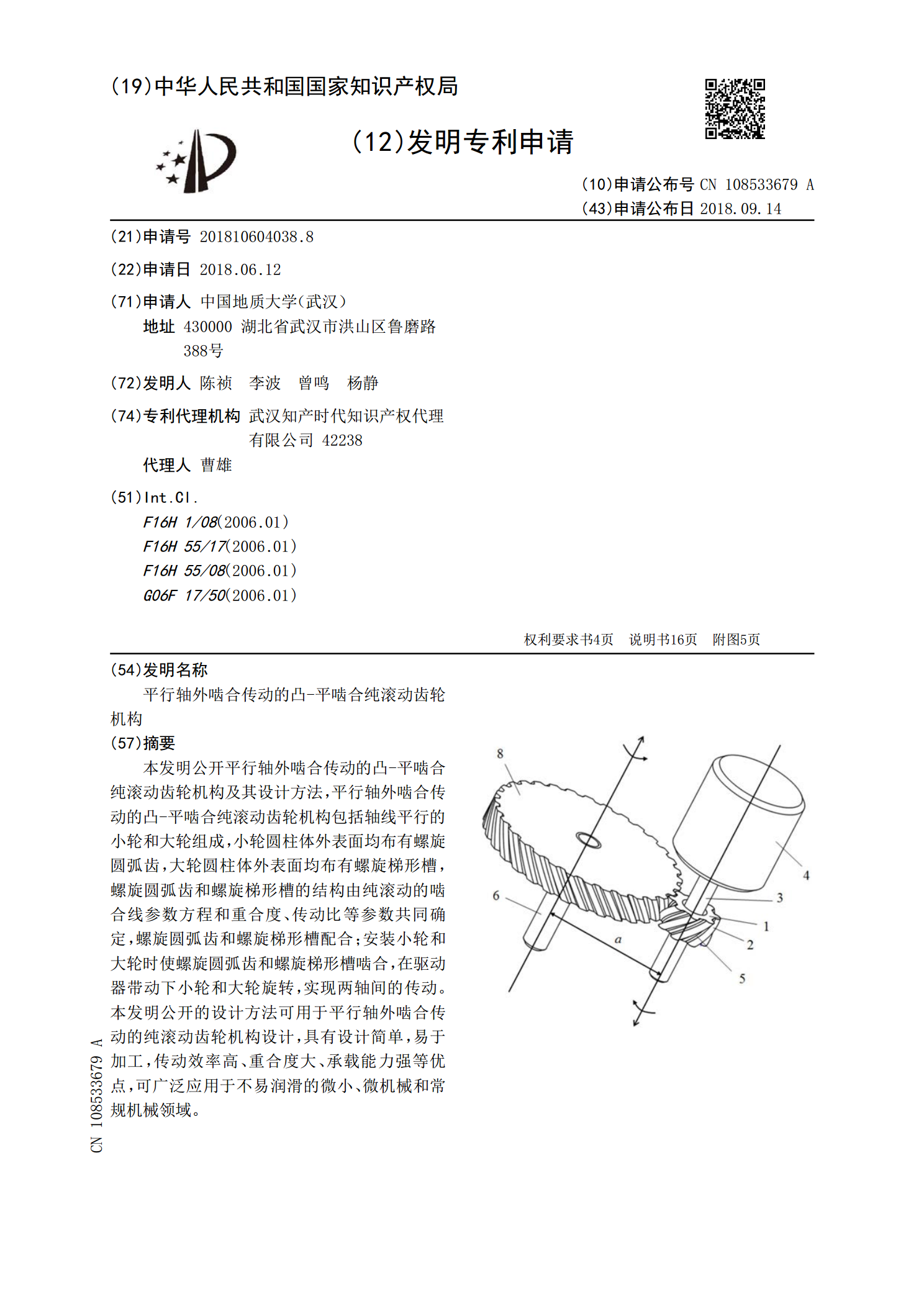
平行轴外啮合传动的凸-平啮合纯滚动齿轮机构.pdf
本发明公开平行轴外啮合传动的凸‑平啮合纯滚动齿轮机构及其设计方法,平行轴外啮合传动的凸‑平啮合纯滚动齿轮机构包括轴线平行的小轮和大轮组成,小轮圆柱体外表面均布有螺旋圆弧齿,大轮圆柱体外表面均布有螺旋梯形槽,螺旋圆弧齿和螺旋梯形槽的结构由纯滚动的啮合线参数方程和重合度、传动比等参数共同确定,螺旋圆弧齿和螺旋梯形槽配合;安装小轮和大轮时使螺旋圆弧齿和螺旋梯形槽啮合,在驱动器带动下小轮和大轮旋转,实现两轴间的传动。本发明公开的设计方法可用于平行轴外啮合传动的纯滚动齿轮机构设计,具有设计简单,易于加工,传动效率高
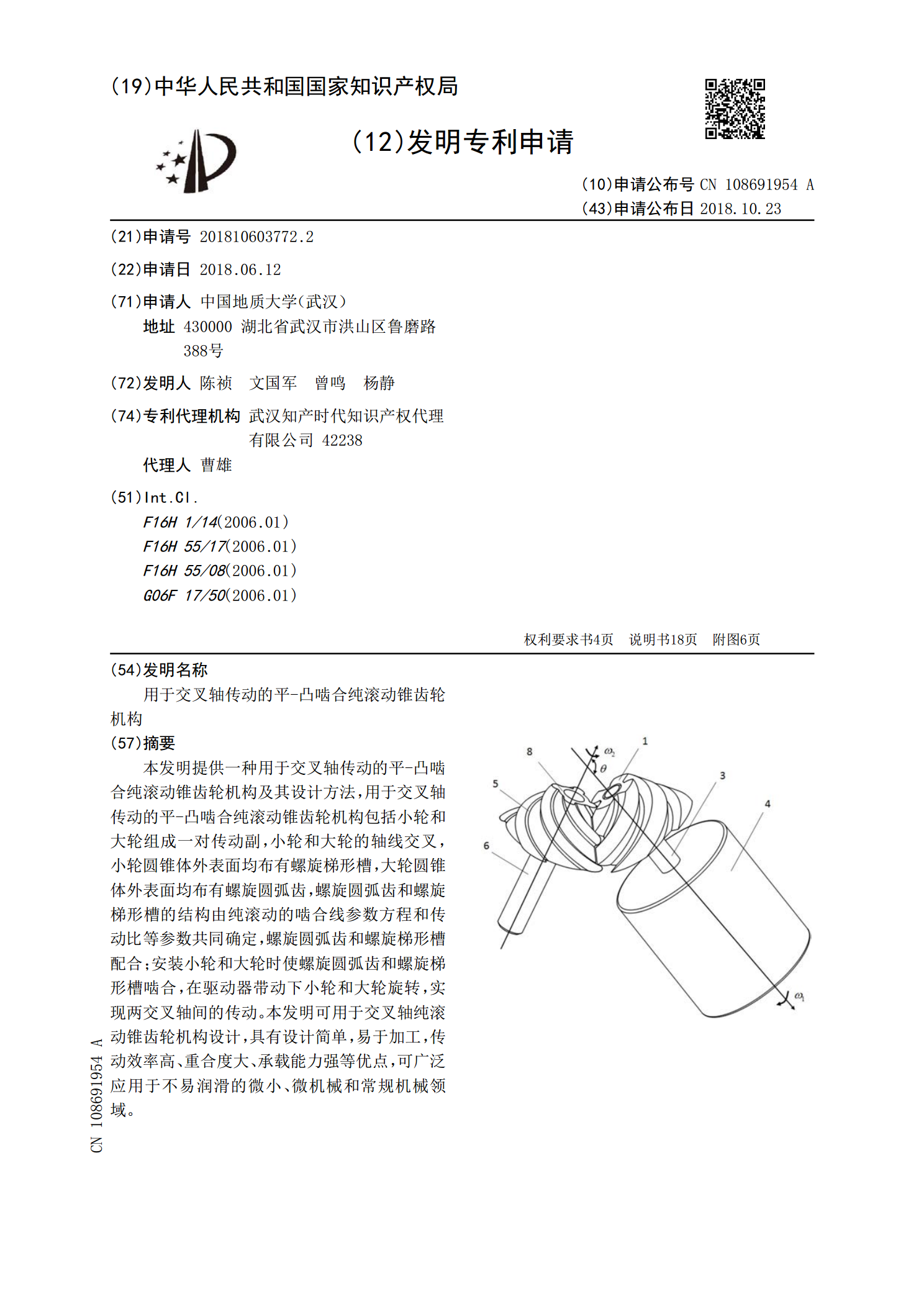
用于交叉轴传动的平-凸啮合纯滚动锥齿轮机构.pdf
本发明提供一种用于交叉轴传动的平‑凸啮合纯滚动锥齿轮机构及其设计方法,用于交叉轴传动的平‑凸啮合纯滚动锥齿轮机构包括小轮和大轮组成一对传动副,小轮和大轮的轴线交叉,小轮圆锥体外表面均布有螺旋梯形槽,大轮圆锥体外表面均布有螺旋圆弧齿,螺旋圆弧齿和螺旋梯形槽的结构由纯滚动的啮合线参数方程和传动比等参数共同确定,螺旋圆弧齿和螺旋梯形槽配合;安装小轮和大轮时使螺旋圆弧齿和螺旋梯形槽啮合,在驱动器带动下小轮和大轮旋转,实现两交叉轴间的传动。本发明可用于交叉轴纯滚动锥齿轮机构设计,具有设计简单,易于加工,传动效率高、