
一种高精度伸缩机械臂.pdf

元枫****文章

1/8

2/8

3/8

4/8

5/8

6/8

7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种高精度伸缩机械臂.pdf
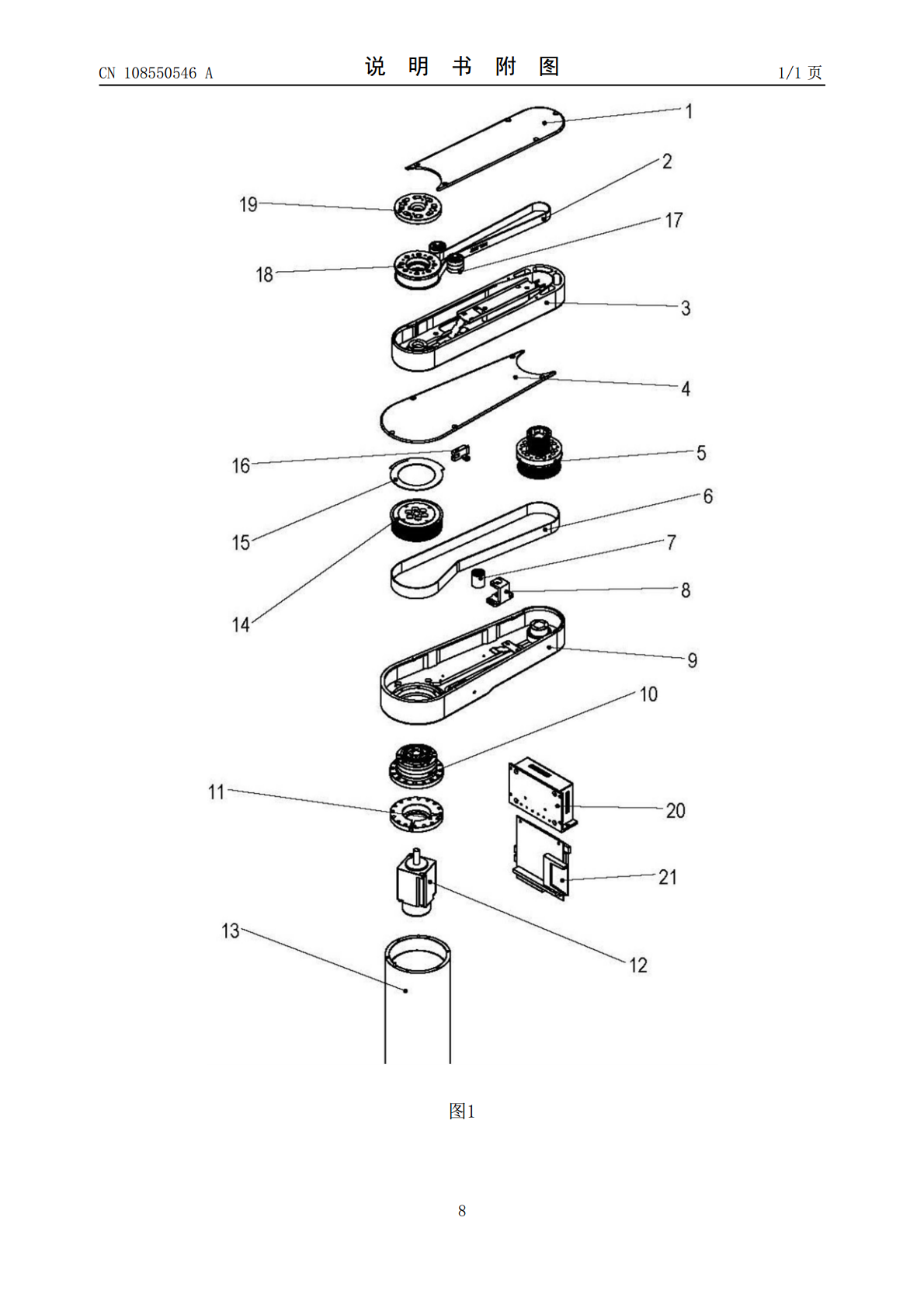
本发明提供一种高精度伸缩机械臂,包括:下臂箱的第一端安装在安装底座,下臂箱内设置有第一传动步带轮;上臂箱内设有终端步带轮,终端步带轮的端面连接有夹爪固定底座;上臂箱的第二端通过第二传动步带轮与下臂箱的第二端转动连接,第二传动步带轮包括依次固定连接的上部步带轮、安装盘和下部步带轮,上部步带轮位于上臂箱内,上部步带轮通过终端同步带与终端步带轮传动连接,安装盘连接上臂箱的第二端,下部步带轮位于下臂箱内,下部步带轮通过传动步进带与第一传动步带轮传动连接;谐波减速器的输出端与第一传动步带轮固接而同步转动:伺服电机的
一种伸缩式机械臂.pdf
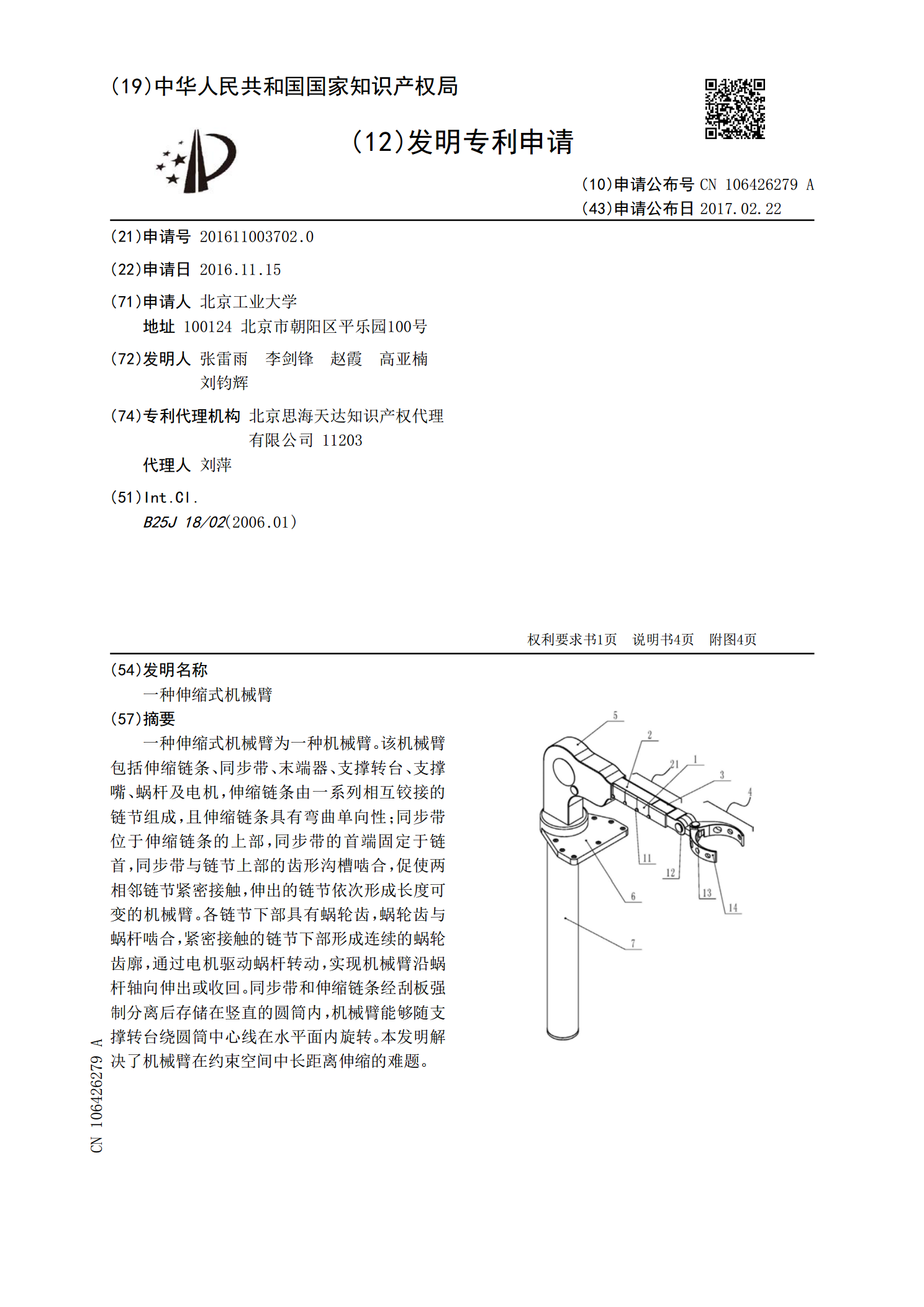
一种伸缩式机械臂为一种机械臂。该机械臂包括伸缩链条、同步带、末端器、支撑转台、支撑嘴、蜗杆及电机,伸缩链条由一系列相互铰接的链节组成,且伸缩链条具有弯曲单向性;同步带位于伸缩链条的上部,同步带的首端固定于链首,同步带与链节上部的齿形沟槽啮合,促使两相邻链节紧密接触,伸出的链节依次形成长度可变的机械臂。各链节下部具有蜗轮齿,蜗轮齿与蜗杆啮合,紧密接触的链节下部形成连续的蜗轮齿廓,通过电机驱动蜗杆转动,实现机械臂沿蜗杆轴向伸出或收回。同步带和伸缩链条经刮板强制分离后存储在竖直的圆筒内,机械臂能够随支撑转台绕圆

一种等截面空间机械臂臂杆伸缩机构.pdf
本发明公开了一种等截面空间机械臂臂杆伸缩机构,通过水平板带和竖直板带相互锁紧、啮合形成螺旋管柱的形式实现机械臂臂杆的伸缩,使得该臂杆具有收纳率低的特点,同时可使空间机械臂具有变构型的能力;当机械臂处于收缩状态时,具有发射包络小,操作精度高的特点;当机械臂处于伸长状态时,具有可达范围大的特点。臂杆伸缩的功能可提高机械臂在轨服务的适应能力;竖直板带沿高度方向的横截面上设置折弯,可保证同侧的两面间的距离与竖直板带厚度一致,下一层的竖直板带不会因重叠后凸起,而下层与上一层的竖直板带的外表面处在同一竖直面内,因此可

一种核电免维护伸缩机械臂.pdf
本发明公开了一种核电免维护伸缩机械臂,涉及伸缩机械臂技术领域,该伸缩机械臂旨在解决现有技术下伸缩臂积累误差造成的底部摆动大动作精度低,硬臂节之间的间隙较大,容易积累核辐射物质的技术问题。该伸缩机械臂包括第五节伸缩臂、安装在第五节伸缩臂下端的第一下端盖、安装在第五节伸缩臂内侧且可沿竖向移动的第四节伸缩臂、依次固定在第四节伸缩臂上端的第一上连接法兰和第一导向套。该伸缩机械臂利用第一排珠轨座的设计,在一定范围内自行调整各伸缩臂之间的间隙,采用第一钢滚珠循环滚动接触的原理,一方面可以防止伸缩臂在伸缩时的四点窜动,

一种伸缩型复合机械臂.pdf
本发明公开了一种伸缩型复合机械臂,包括:支撑底座、滑台、支撑柜、气动部件、升降油缸、回转轴、齿轮箱、螺纹连杆、伸缩缸、抓手以及控制操作面板。支撑底座,其底部设置有支撑块;滑台,固定安装在支撑底座上,滑台上设置有滑轨和滑块;支撑柜,固定卡接在滑台滑轨上,可以在滑台上进行往复运动;气动部件,固定安装在支撑柜的内部;升降油缸,固定安装支撑柜的顶端,本发明结构简单,拆装方便,配置有带负载的升降油缸和伸缩装置,运行稳定安全可靠,适用于大型机械设备的生产,节点少,高效运用,反应速度快,灵活性强。