
一种新型爬壁机器人.pdf

mm****酱吖


1/7

2/7

3/7

4/7

5/7

6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种新型爬壁机器人.pdf
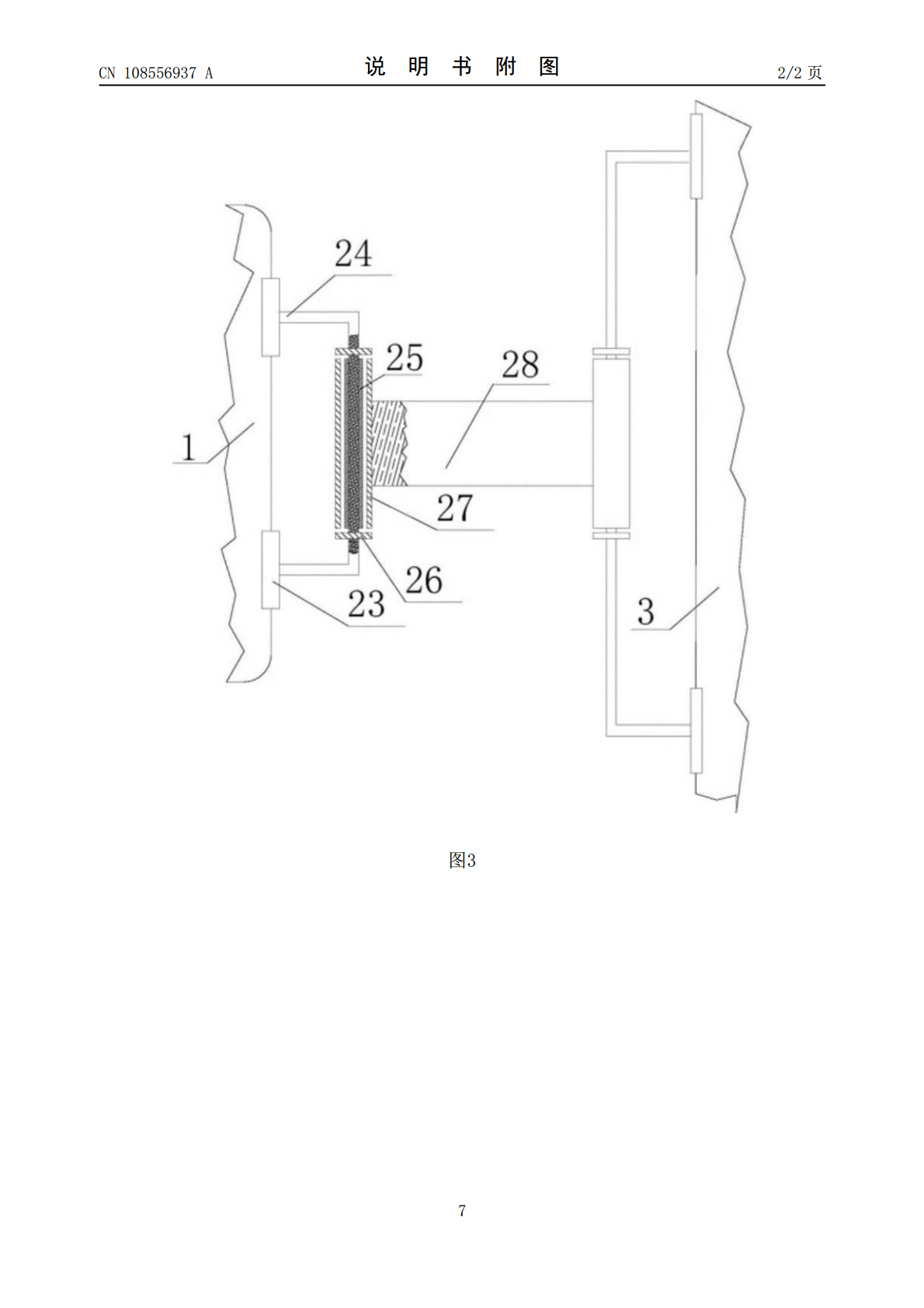
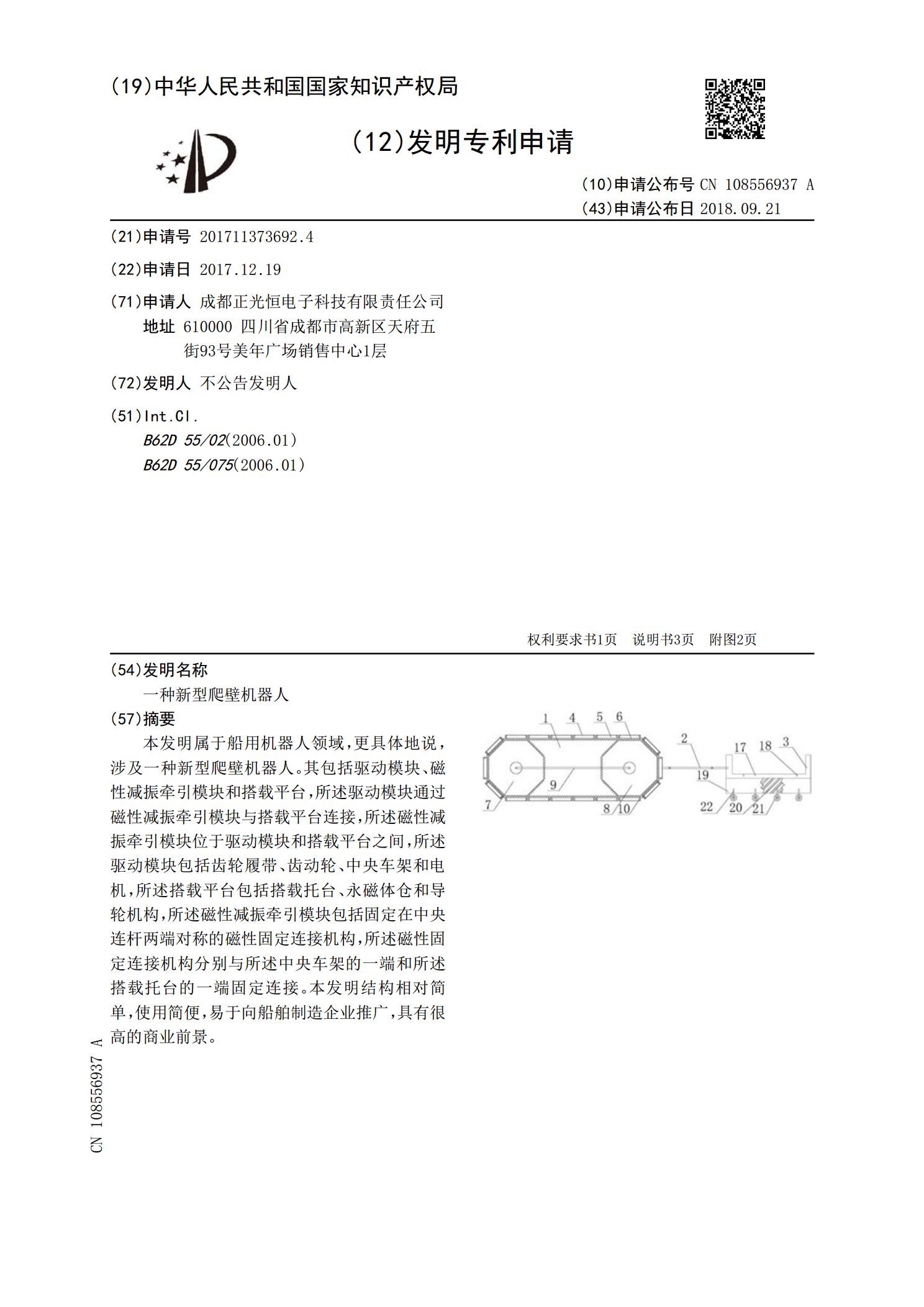
本发明属于船用机器人领域,更具体地说,涉及一种新型爬壁机器人。其包括驱动模块、磁性减振牵引模块和搭载平台,所述驱动模块通过磁性减振牵引模块与搭载平台连接,所述磁性减振牵引模块位于驱动模块和搭载平台之间,所述驱动模块包括齿轮履带、齿动轮、中央车架和电机,所述搭载平台包括搭载托台、永磁体仓和导轮机构,所述磁性减振牵引模块包括固定在中央连杆两端对称的磁性固定连接机构,所述磁性固定连接机构分别与所述中央车架的一端和所述搭载托台的一端固定连接。本发明结构相对简单,使用简便,易于向船舶制造企业推广,具有很高的商业前景
一种新型爬壁机器人.pdf
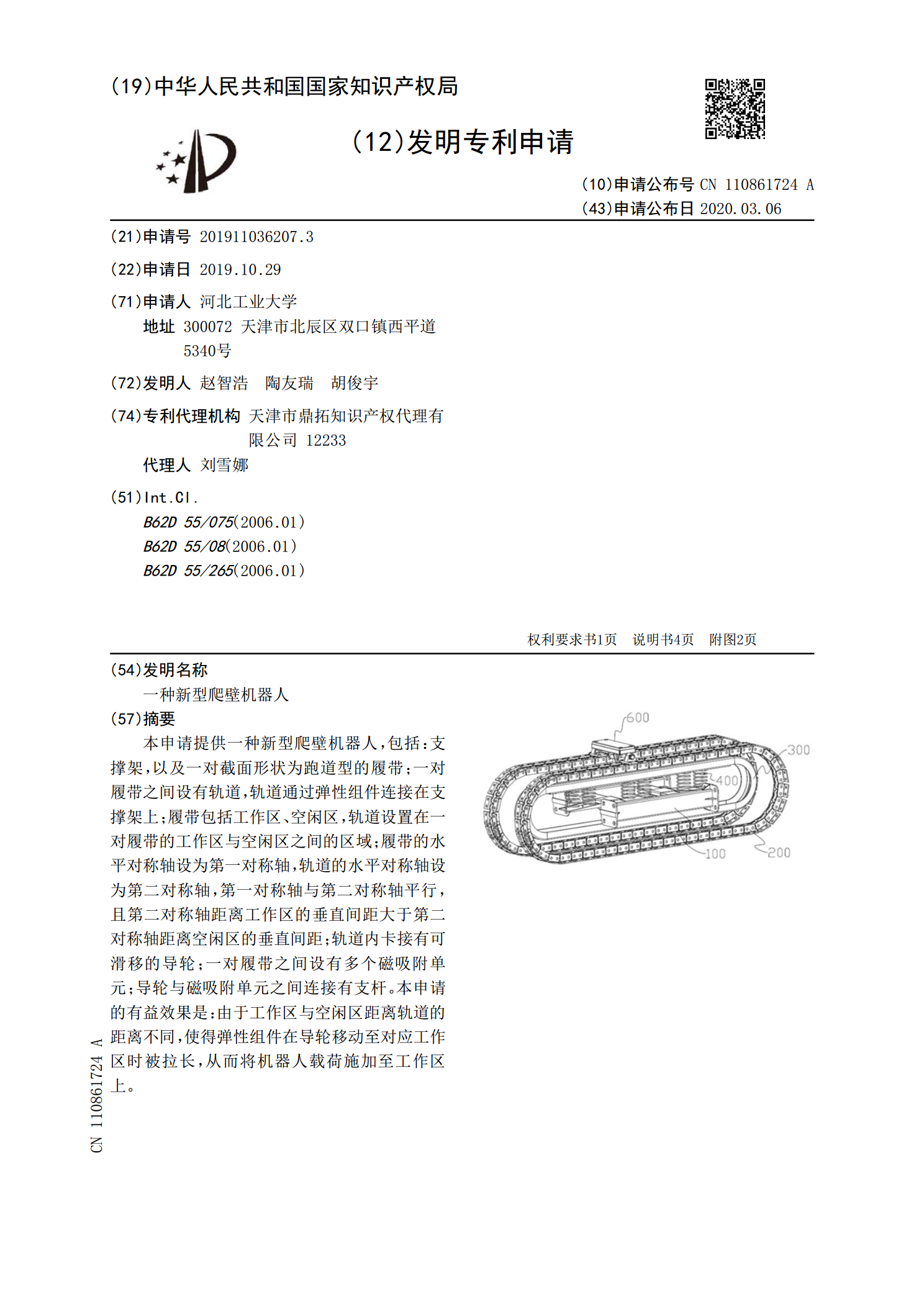
本申请提供一种新型爬壁机器人,包括:支撑架,以及一对截面形状为跑道型的履带;一对履带之间设有轨道,轨道通过弹性组件连接在支撑架上;履带包括工作区、空闲区,轨道设置在一对履带的工作区与空闲区之间的区域;履带的水平对称轴设为第一对称轴,轨道的水平对称轴设为第二对称轴,第一对称轴与第二对称轴平行,且第二对称轴距离工作区的垂直间距大于第二对称轴距离空闲区的垂直间距;轨道内卡接有可滑移的导轮;一对履带之间设有多个磁吸附单元;导轮与磁吸附单元之间连接有支杆。本申请的有益效果是:由于工作区与空闲区距离轨道的距离不同,使

新型爬壁机器人的优化设计研究.docx
新型爬壁机器人的优化设计研究新型爬壁机器人的优化设计研究摘要:随着科技的不断发展和人类对于高空空间的探索需求的增加,爬壁机器人作为一种可靠、高效和灵活的工具,在建筑维修、空间探索等领域发挥着重要作用。本论文对新型爬壁机器人的优化设计进行了研究,主要包括机器人结构设计、运动控制算法、材料选择以及功能扩展等方面。通过对比实验和仿真模型的分析,本研究提出了一种有效的优化设计方案,提高了机器人的爬行能力和工作效率。关键词:爬壁机器人,优化设计,运动控制算法,材料选择,功能扩展1.引言近年来,爬壁机器人在建筑维修、
一种新型足式爬壁机器人运动机构.pdf
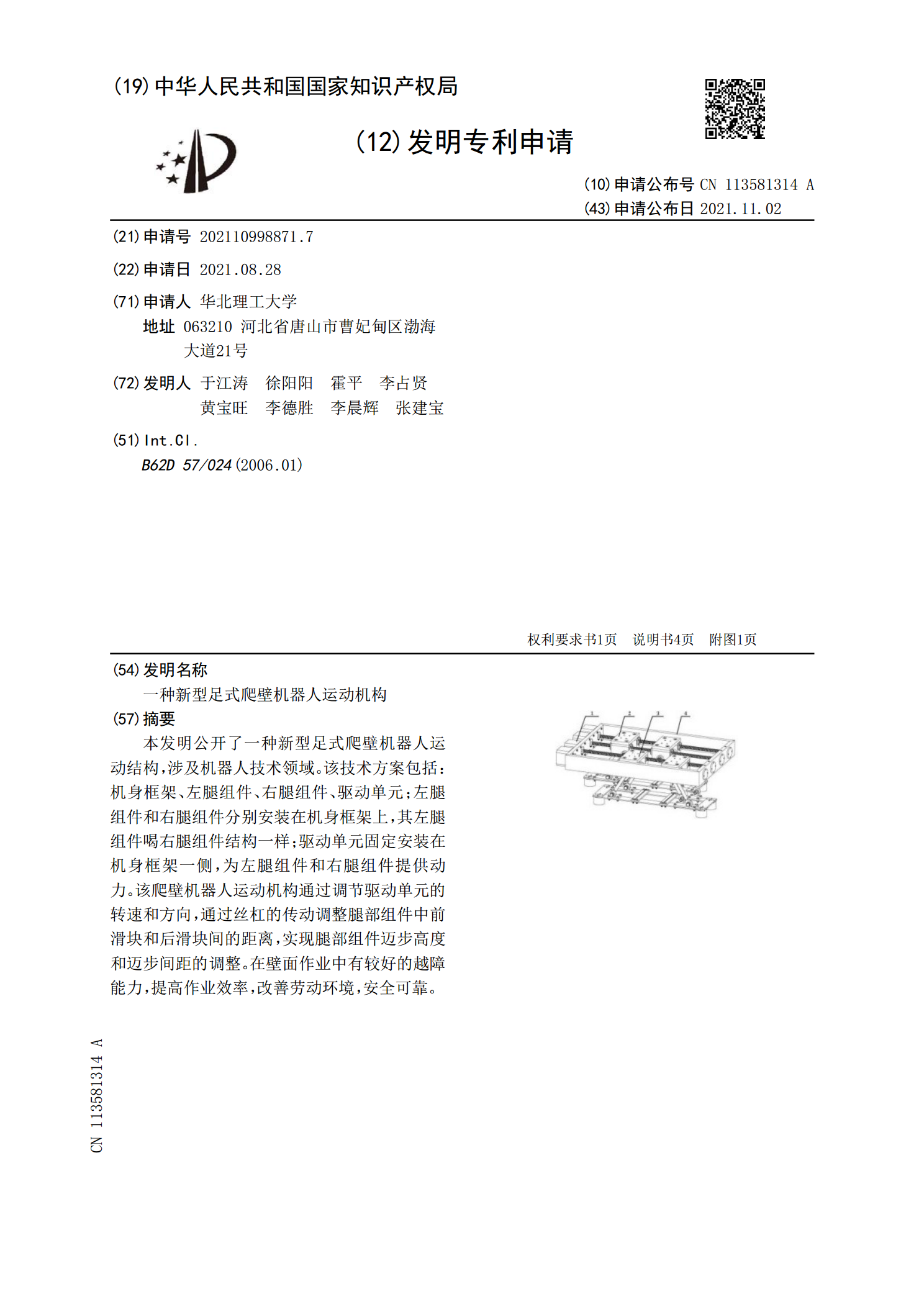
本发明公开了一种新型足式爬壁机器人运动结构,涉及机器人技术领域。该技术方案包括:机身框架、左腿组件、右腿组件、驱动单元;左腿组件和右腿组件分别安装在机身框架上,其左腿组件喝右腿组件结构一样;驱动单元固定安装在机身框架一侧,为左腿组件和右腿组件提供动力。该爬壁机器人运动机构通过调节驱动单元的转速和方向,通过丝杠的传动调整腿部组件中前滑块和后滑块间的距离,实现腿部组件迈步高度和迈步间距的调整。在壁面作业中有较好的越障能力,提高作业效率,改善劳动环境,安全可靠。

一种新型的全驱动复合吸附式爬壁机器人.pdf
本发明属于特种机器人技术领域,具体来说是一种新型的全驱动复合吸附式爬壁机器人,包括爬行机构,爬行机构包括采用驱动转向一体化磁轮的前轮模块、采用永磁间隙吸附装置的后轮模块、连接前后轮的车架和安装在车架上的电机驱动控制器;爬行机构为三轮结构,三轮均为驱动轮,采用前轮受控转向、依靠两后轮的差速及前轮的受控转向实现在导磁壁面上的转向。本发明的优点在于爬行装置采用接触式磁轮吸附和非接触式间隙吸附的复合方式,三轮结构,所有车轮均为驱动轮,采用冗余控制转向方式,依靠两后轮的差速及前轮的受控转向实现在导磁壁面上的转向,通