
一种多功能磁力爬壁车.pdf

丹烟****魔王


1/8

2/8

3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种多功能磁力爬壁车.pdf
本发明公开了一种多功能磁力爬壁车,采用四轮的轮式结构,爬壁车具备快速轮式的爬行运动,在平坦的路段采用轮式越障模式,爬壁车爬坡的速度较快且稳定。在复杂的路段,爬壁车通过摄像头的图像返回实现灵活的自主避障;摄像头与上位机控制板连接,摄像头对数据读取返回给上位机控制板,上位机控制板对数据进行处理并进行判断,向下位机控制板发出信号,下位机控制板与上位机控制板连接,下位机控制板控制相应的电机的运行,实现对电机转速与方向的控制、并且采集和处理各分系统返回的信息与数据。爬壁车具有环境适应性强,能用于在磁性材料制成的地面

爬壁车.pdf
一种爬壁车,包括底板、第一驱动源、动力轴、从动轴、第一传动链及第二传动链,底板两端分别设有第一轴承座和第二轴承座,上端面设有标尺;第一驱动源动力输入端具有一输出链轮;动力轴能转动地设于第一轴承座上,两端分别设有主动链轮,中部设有输入链轮;从动轴能转动地设于第二轴承座上,两端分别设有从动链轮;第一传动链绕制于输出链轮和输入链轮外周并能传动;第二传动链为两条,分别绕制于主动链轮和从动链轮外周并能传动且具有磁体。与现有技术相比,本发明的优点在于:履带式爬壁车结构简单合理,操作快捷方便,测定快速准确可靠,降低了人
一种爬壁车及基于该爬壁车的检测机器人.pdf
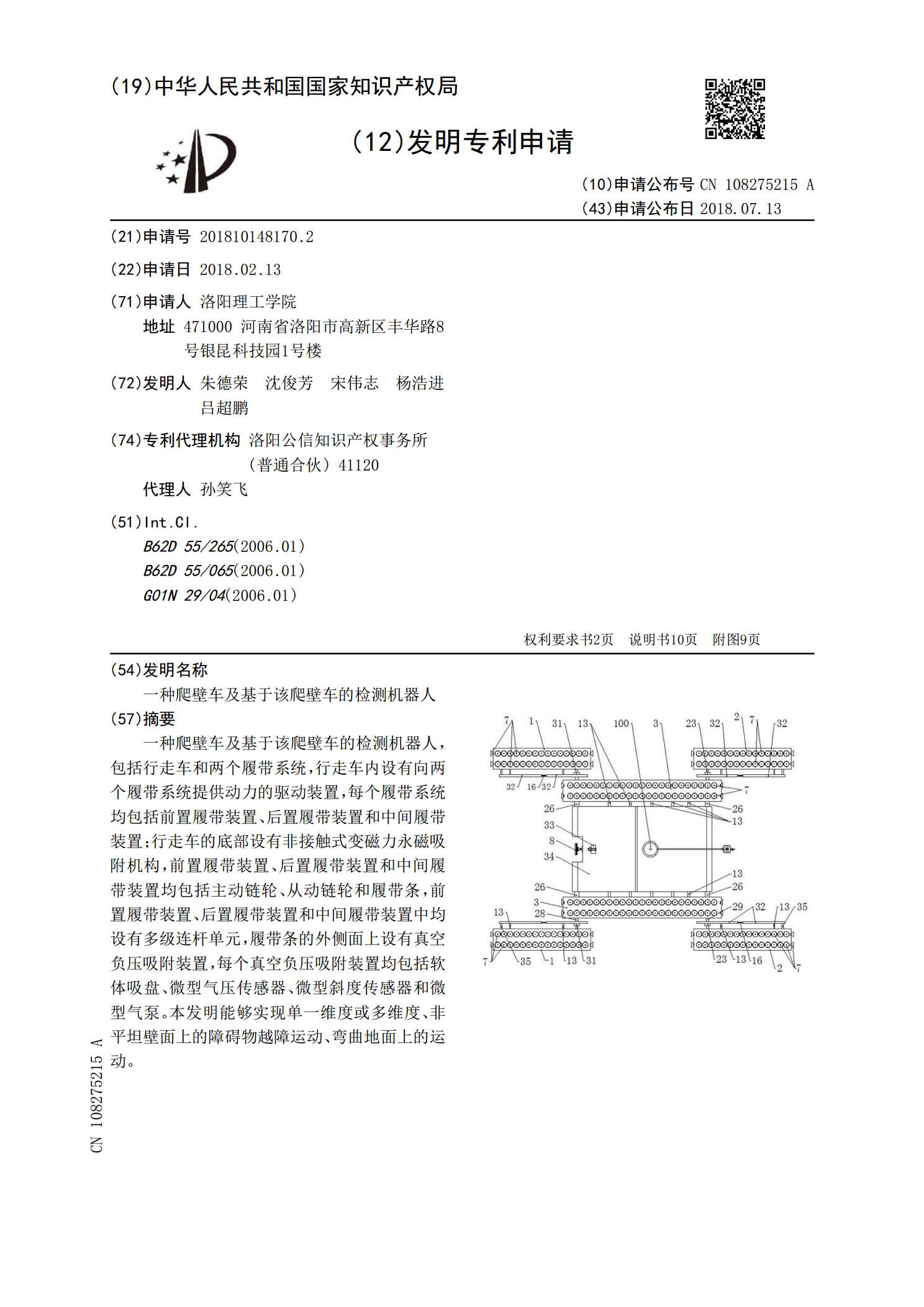
一种爬壁车及基于该爬壁车的检测机器人,包括行走车和两个履带系统,行走车内设有向两个履带系统提供动力的驱动装置,每个履带系统均包括前置履带装置、后置履带装置和中间履带装置;行走车的底部设有非接触式变磁力永磁吸附机构,前置履带装置、后置履带装置和中间履带装置均包括主动链轮、从动链轮和履带条,前置履带装置、后置履带装置和中间履带装置中均设有多级连杆单元,履带条的外侧面上设有真空负压吸附装置,每个真空负压吸附装置均包括软体吸盘、微型气压传感器、微型斜度传感器和微型气泵。本发明能够实现单一维度或多维度、非平坦壁面上

一种磁力多足爬壁机器人.pdf
本发明公开了一种磁力多足爬壁机器人,采用机械腿越障和轮式运动结合,使机器人在运动中具有灵活的越障能力和环境适应性,能用于在各种材料制成的地面和墙面上的运动,实现测量及清洁功能。爬壁机器人具有组群性质的附加作业功能;当两台及以上的爬壁机器人工作时,使用各自控制的伺服电机,协作运行完成作业。爬壁机器人使用闭环控制模式,万向轮上的无刷电机分别与三个电机驱动板连接,电机驱动板分别与下位机连接,下位机与上位机连接,摄像头与上位机连接,摄像头对数据的读取返回给上位机,上位机对数据进行处理并进行判断,向下位机发出信号,

一种用于船舶清洗的磁力爬壁装备.pdf
一种用于船舶清洗的磁力爬壁装备,包括摆臂式磁力爬壁机器人、吸盘式磁力爬壁机器人和机器人辅助转运车架,通过对摆臂式磁力爬壁机器人和吸盘式磁力爬壁机器人的从动轮模块进行改进,使从动轮模块具有互换性并且使用方便。通过对摆臂式磁力爬壁机器人的传感器安装方式进行改进,使传感器位置的调整更为便捷。通过对机器人辅助转运车架的结构进行改进,使辅助转运车架对设备的安全保护和转运都更为可靠,解决了现有的磁力爬壁装备存在的多种问题,满足生产需要。