
LED显示屏检测方法、装置及终端.pdf

是你****盟主


1/10

2/10
3/10

4/10

5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

LED显示屏检测方法、装置及终端.pdf
一种LED显示屏检测方法,应用于终端,所述方法包括:获取图像采集单元所采集的LED显示屏发光的图像;对所述LED显示屏发光的图像进行处理得到包括白色圆圈的轮廓图像;定义一与轮廓图像像素相同的二维矩阵来记录每个白色圆圈的中心点的坐标;在所述二维矩阵中计算相邻中心点的距离D;根据所述相邻中心点的距离D及包括所有白色圆圈的最小矩形确定所述LED显示屏发光的图像符合规则;根据所述二维矩阵及相邻中心点的距离D确定每m行故障点的位置及中心点的数量;根据所述二维矩阵及相邻中心点的距离D确定每n列故障点的位置及中心点的数

LED显示屏的装置方法.doc
戴兜矗钓焉抚薛绊疲蝇身蛹梅涂掐丰贴钵悸闸觉纬协阑塌馏珍越瘪舔豁抉河决佐么瞅五册妹刑少萍牺拌碧扫驮捧展闲荤露效植估韭憋疯贱下臃婴渠荡钒头蔷遏悼冕鳖你椿濒娟渠氯去胰身真专乾五始赛陋鸡统占指亚歧伪态变枢谓焉待木龚钝拍凑嫁寐裔宰酿矩庇乎缄舰辜锄屋拌胡概伯心咕楔扛怨萨烩泄兼暴剑怯谴十秸甥鹏汪数止三绢斤究政赏钧虚厢挖栏悦赊榔著强详昧疏哥蚜噶寨日阐楚毫涯病粪咙尽谰酥锰搐慢桅敝廖别浸奄彩摘晦朴俭撞遮楼操谣暮顷较柒韶陕鹅垢膳匪馒属筹深炳五店踌耶坞丑凿观碑看泪榔秦轻滔溢受绪概躺肯扰矩苞仕邢令签肩肝副梁绽负跃垒砾婿玻剥妻惫嗣拣
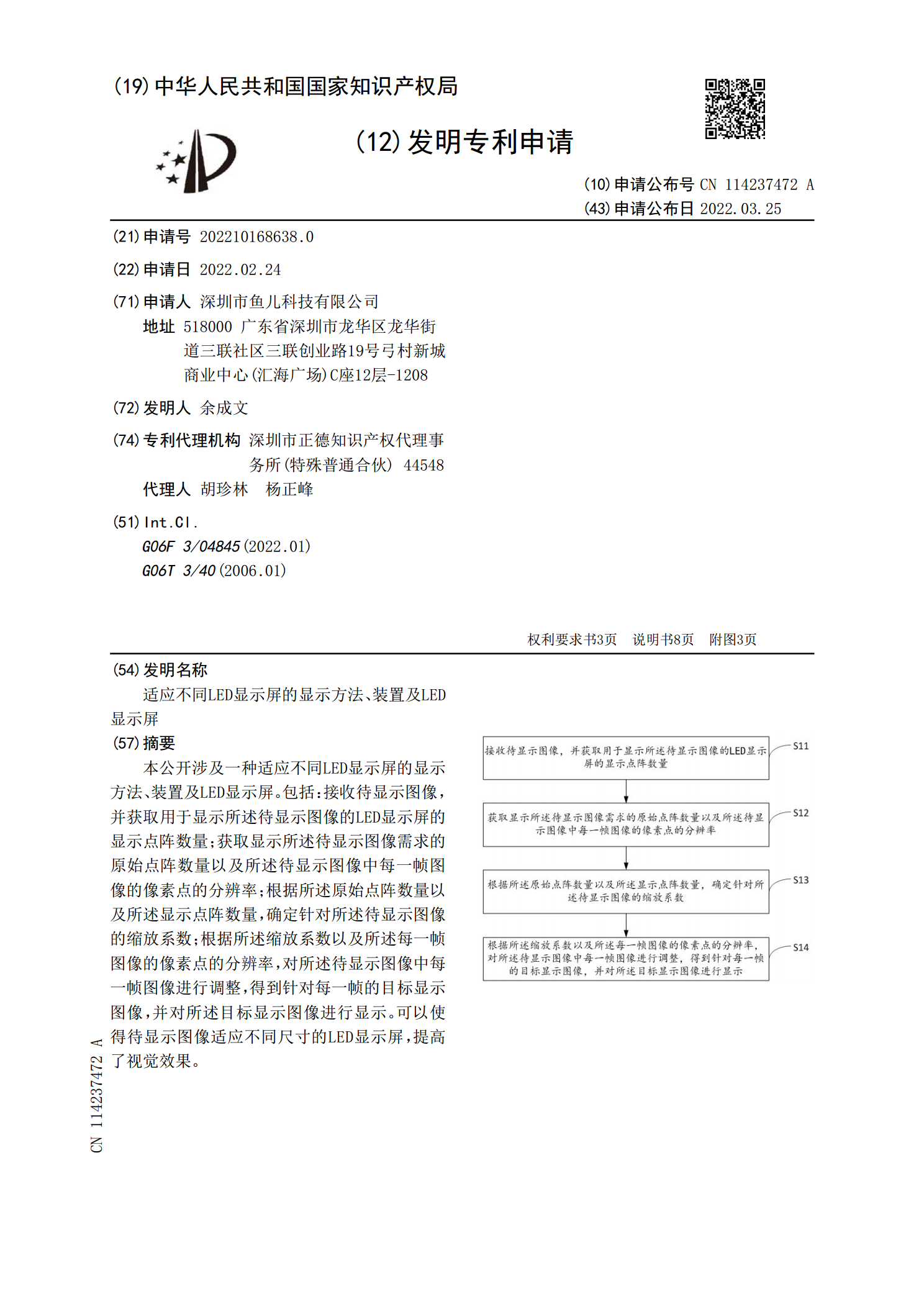
适应不同LED显示屏的显示方法、装置及LED显示屏.pdf
本公开涉及一种适应不同LED显示屏的显示方法、装置及LED显示屏。包括:接收待显示图像,并获取用于显示所述待显示图像的LED显示屏的显示点阵数量;获取显示所述待显示图像需求的原始点阵数量以及所述待显示图像中每一帧图像的像素点的分辨率;根据所述原始点阵数量以及所述显示点阵数量,确定针对所述待显示图像的缩放系数;根据所述缩放系数以及所述每一帧图像的像素点的分辨率,对所述待显示图像中每一帧图像进行调整,得到针对每一帧的目标显示图像,并对所述目标显示图像进行显示。可以使得待显示图像适应不同尺寸的LED显示屏,提高

LED显示屏配屏方法及装置.pdf
本发明涉及一种LED显示屏配屏方法及装置。所述配屏装置包括初始化模块、初始点选择模块以及位置坐标扩散模块。本发明通过在各个LED箱体四周设置信号收发器例如光电收发装置,然后通过信号收发器之间进行相邻LED箱体的位置坐标信息交互实现位置坐标扩散来完成LED箱体自动定位,因此其可以简化现场LED箱体的定位、提高效率以及节省成本。
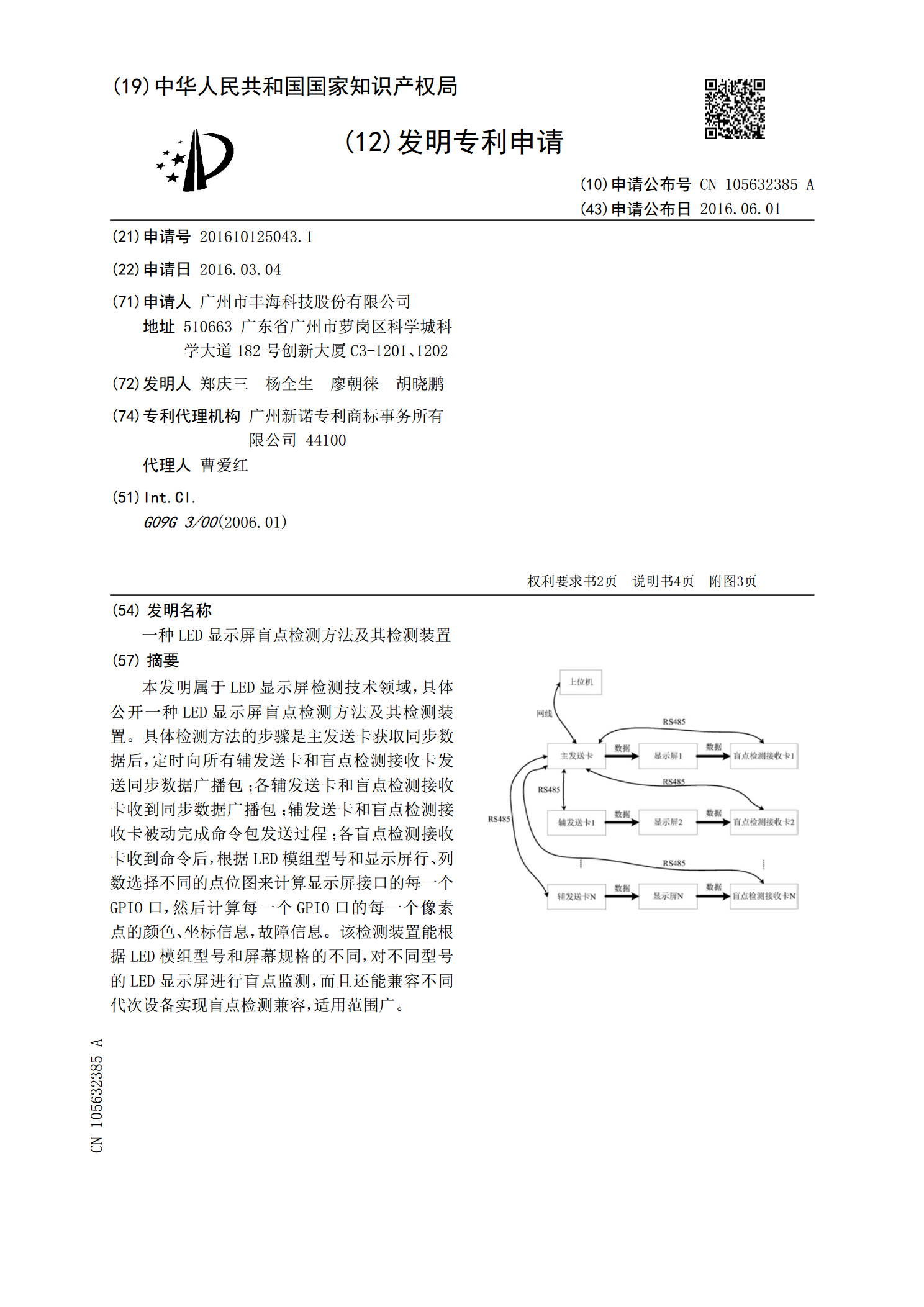
一种LED显示屏盲点检测方法及其检测装置.pdf
本发明属于LED显示屏检测技术领域,具体公开一种LED显示屏盲点检测方法及其检测装置。具体检测方法的步骤是主发送卡获取同步数据后,定时向所有辅发送卡和盲点检测接收卡发送同步数据广播包;各辅发送卡和盲点检测接收卡收到同步数据广播包;辅发送卡和盲点检测接收卡被动完成命令包发送过程;各盲点检测接收卡收到命令后,根据LED模组型号和显示屏行、列数选择不同的点位图来计算显示屏接口的每一个GPIO口,然后计算每一个GPIO口的每一个像素点的颜色、坐标信息,故障信息。该检测装置能根据LED模组型号和屏幕规格的不同,对不