
一种高空智能玻璃清洁装置.pdf

书生****22


1/8

2/8
3/8

4/8

5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种高空智能玻璃清洁装置.pdf
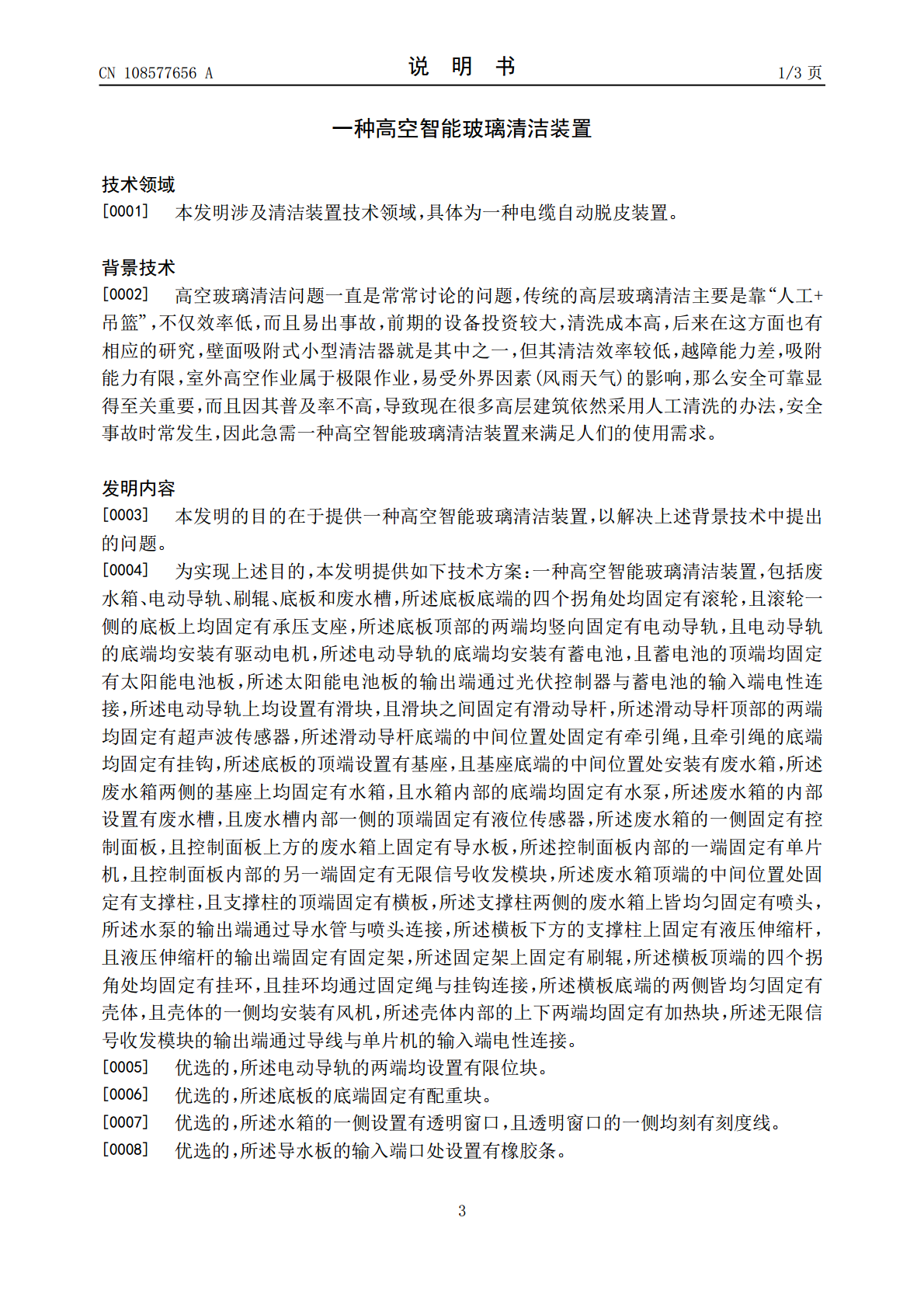
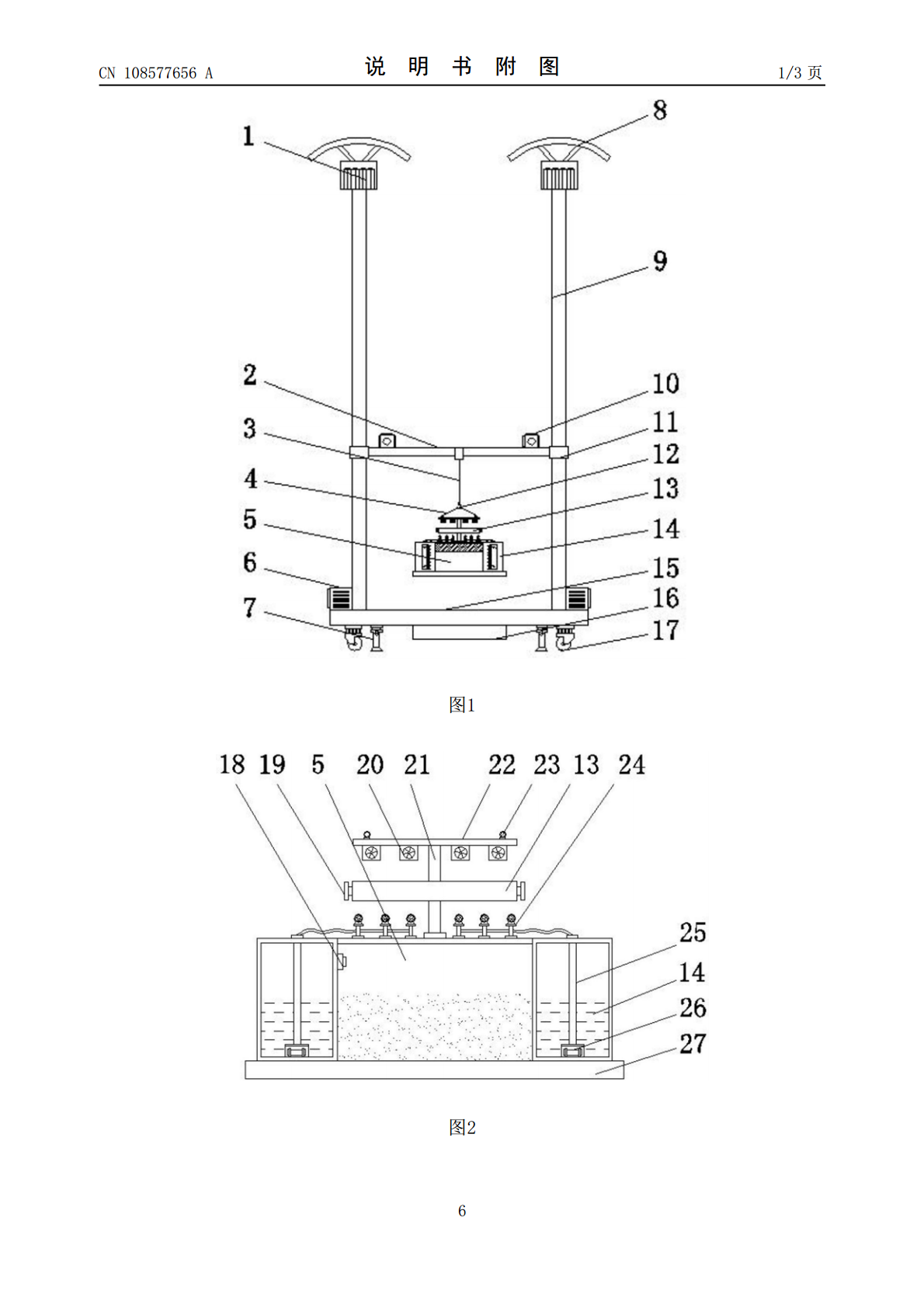
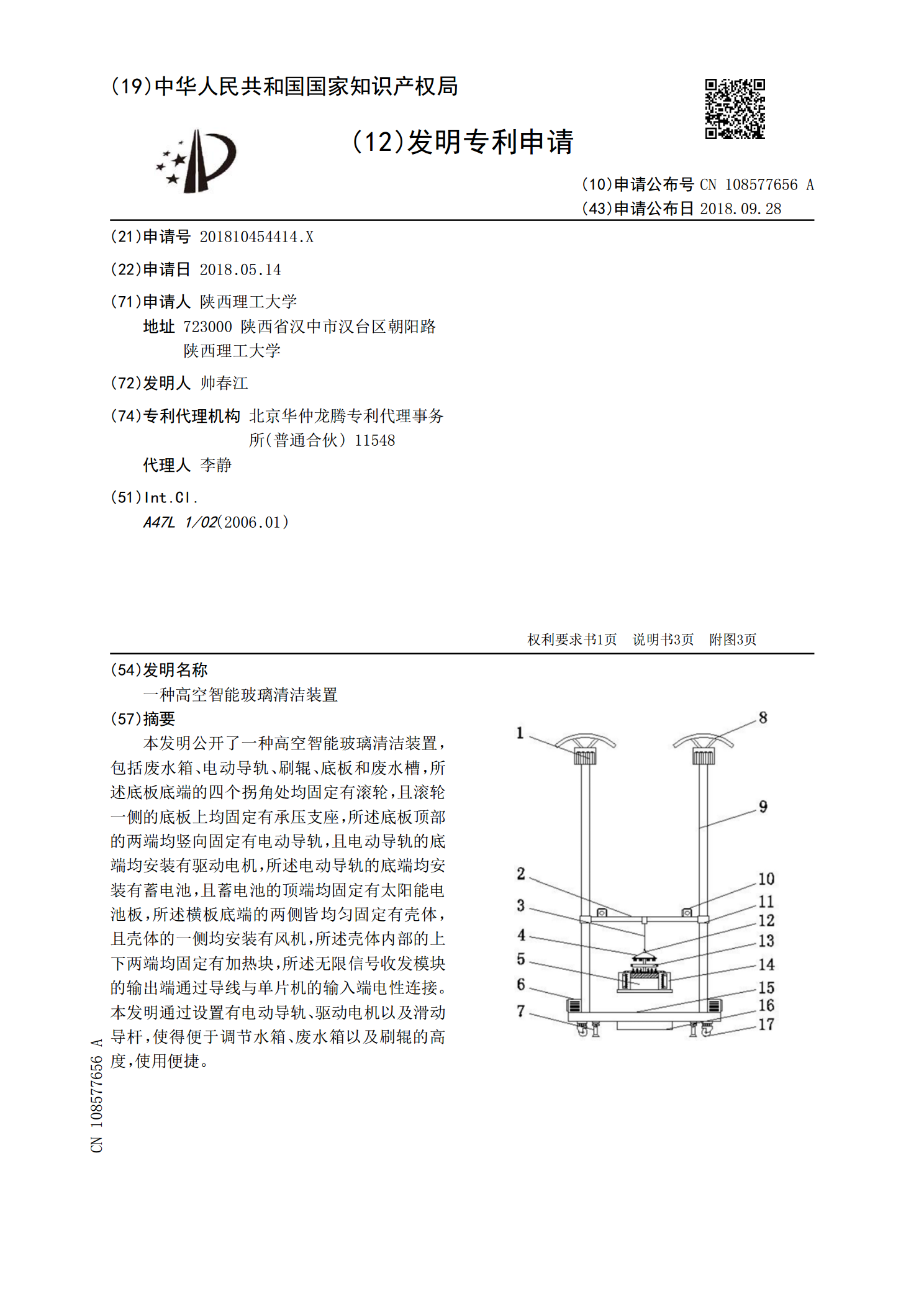
本发明公开了一种高空智能玻璃清洁装置,包括废水箱、电动导轨、刷辊、底板和废水槽,所述底板底端的四个拐角处均固定有滚轮,且滚轮一侧的底板上均固定有承压支座,所述底板顶部的两端均竖向固定有电动导轨,且电动导轨的底端均安装有驱动电机,所述电动导轨的底端均安装有蓄电池,且蓄电池的顶端均固定有太阳能电池板,所述横板底端的两侧皆均匀固定有壳体,且壳体的一侧均安装有风机,所述壳体内部的上下两端均固定有加热块,所述无限信号收发模块的输出端通过导线与单片机的输入端电性连接。本发明通过设置有电动导轨、驱动电机以及滑动导杆,使
一种高空玻璃的自动清洁装置.pdf
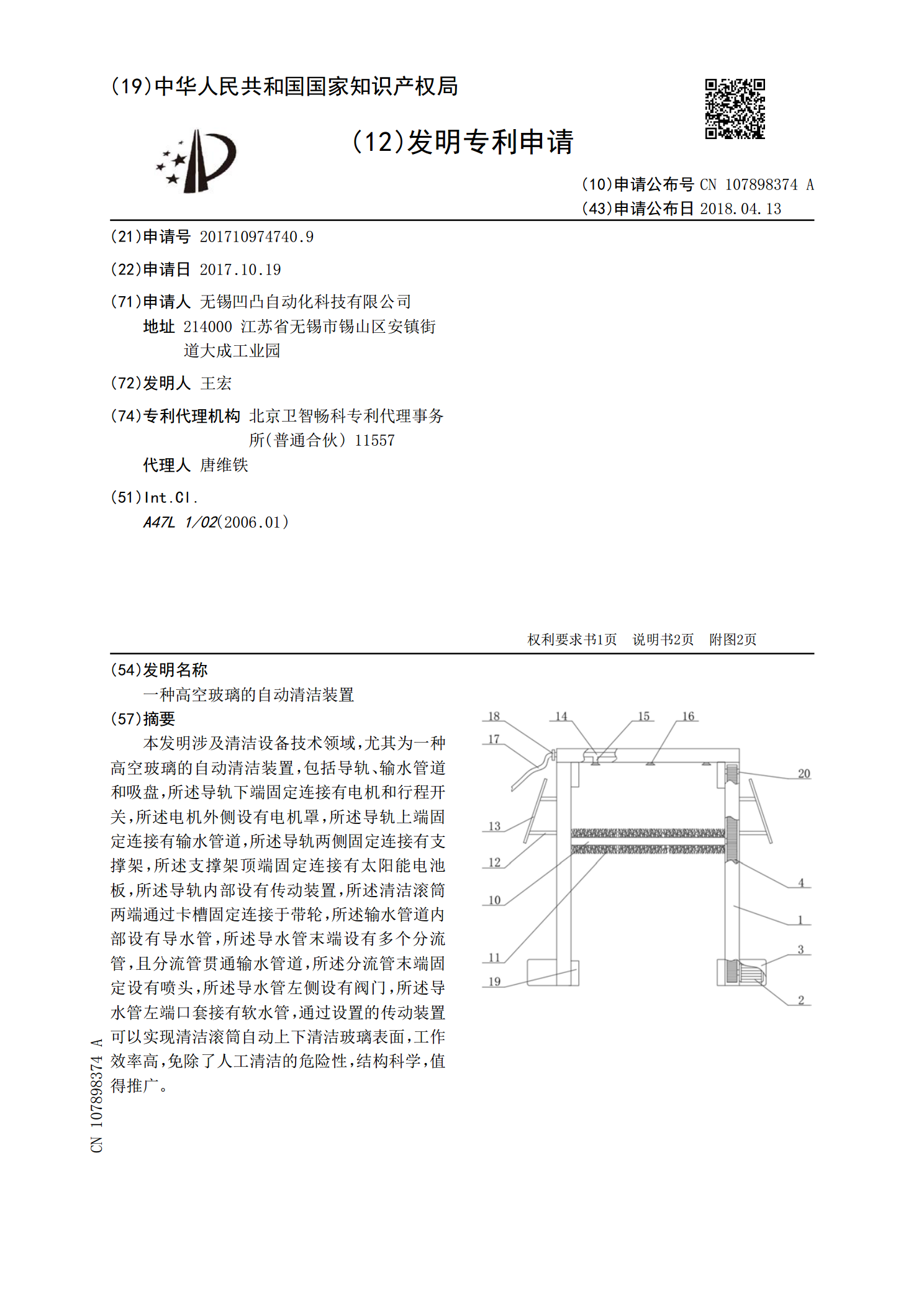
本发明涉及清洁设备技术领域,尤其为一种高空玻璃的自动清洁装置,包括导轨、输水管道和吸盘,所述导轨下端固定连接有电机和行程开关,所述电机外侧设有电机罩,所述导轨上端固定连接有输水管道,所述导轨两侧固定连接有支撑架,所述支撑架顶端固定连接有太阳能电池板,所述导轨内部设有传动装置,所述清洁滚筒两端通过卡槽固定连接于带轮,所述输水管道内部设有导水管,所述导水管末端设有多个分流管,且分流管贯通输水管道,所述分流管末端固定设有喷头,所述导水管左侧设有阀门,所述导水管左端口套接有软水管,通过设置的传动装置可以实现清洁滚
一种高空玻璃清洁装置.pdf
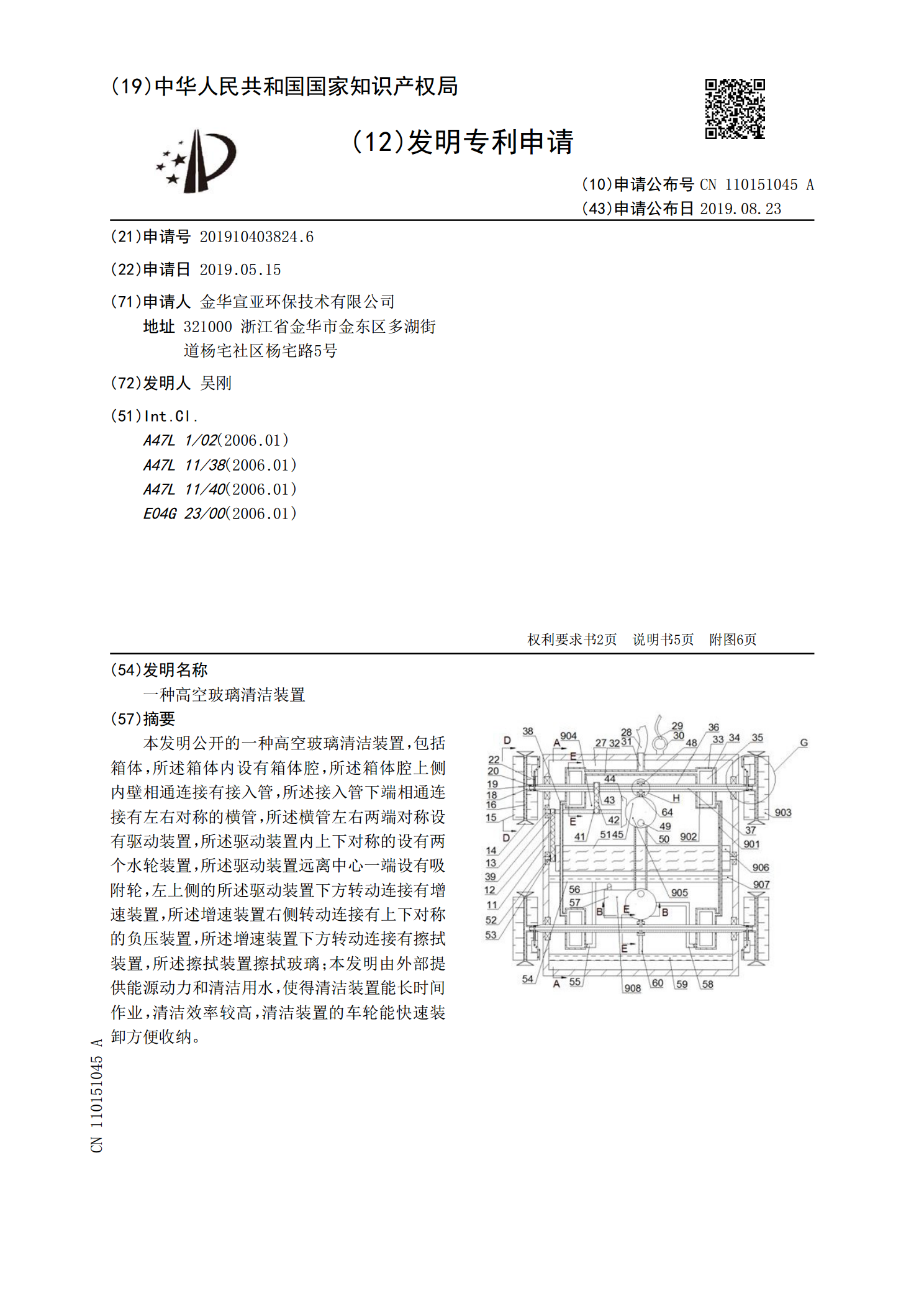
本发明公开的一种高空玻璃清洁装置,包括箱体,所述箱体内设有箱体腔,所述箱体腔上侧内壁相通连接有接入管,所述接入管下端相通连接有左右对称的横管,所述横管左右两端对称设有驱动装置,所述驱动装置内上下对称的设有两个水轮装置,所述驱动装置远离中心一端设有吸附轮,左上侧的所述驱动装置下方转动连接有增速装置,所述增速装置右侧转动连接有上下对称的负压装置,所述增速装置下方转动连接有擦拭装置,所述擦拭装置擦拭玻璃;本发明由外部提供能源动力和清洁用水,使得清洁装置能长时间作业,清洁效率较高,清洁装置的车轮能快速装卸方便收纳

一种高空玻璃清洁装置.pdf
本发明公开一种高空玻璃清洁装置,包括遥控器和清洁器,遥控器为操作者提供控制功能,并将控制信号无线传送至清洁器;清洁器包括底板、离心机、车轮、清洁布、毛刷和控制电路,离心机设置在底板的一侧,车轮设于底板上;毛刷和清洁布均设于底板上离心机的同侧;控制电路包括中央信号处理电路及分别与之连接的信号接收电路、车轮控制电路、毛刷控制电路和离心机控制电路,其中,信号接收电路与遥控器建立无线通信,并将接收到的控制信号送入中央信号处理电路,中央信号处理电路根据控制信号分别通过车轮控制电路、毛刷控制电路和离心机控制电路控制车
一种高空玻璃清洁专用装置.pdf
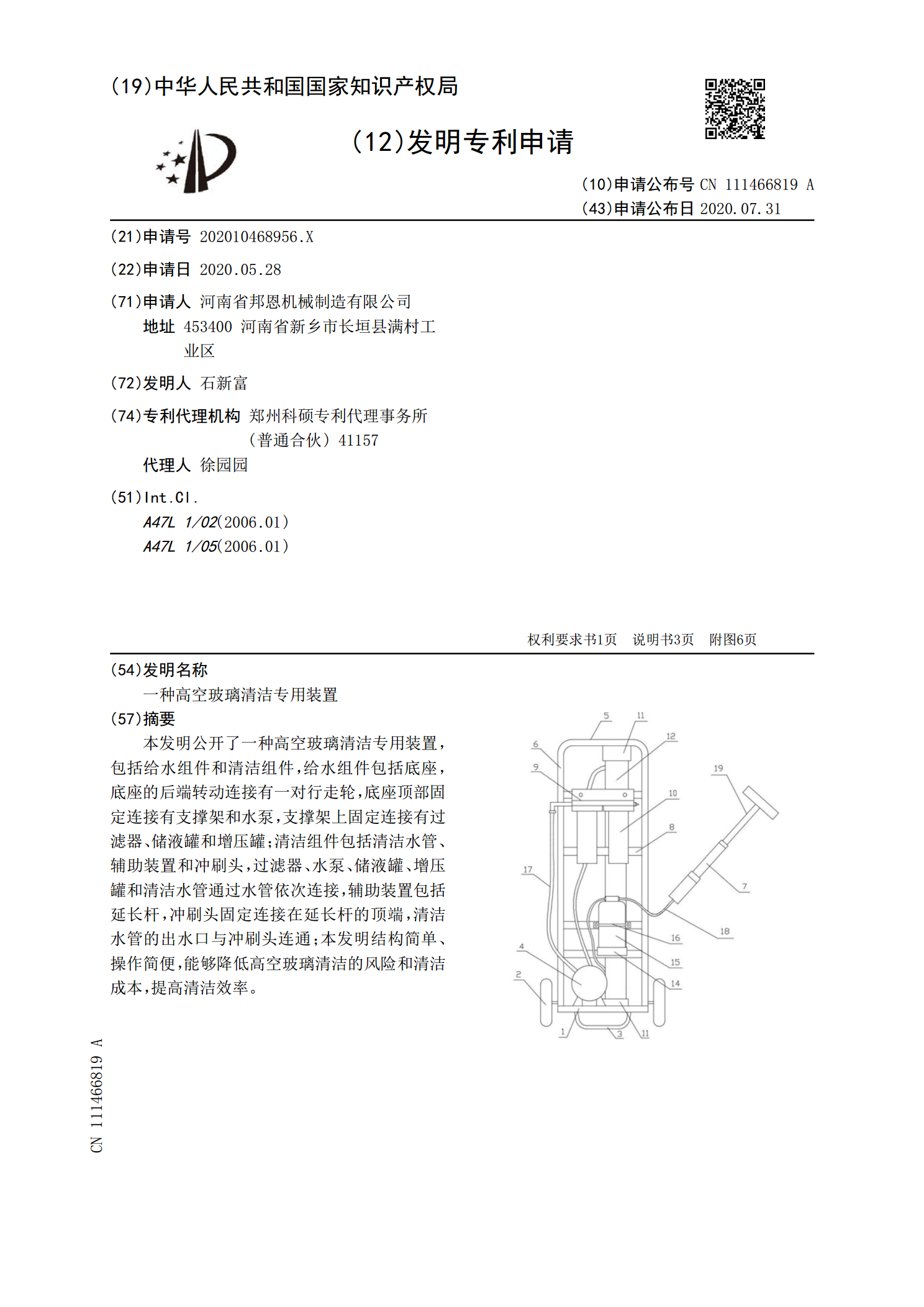
本发明公开了一种高空玻璃清洁专用装置,包括给水组件和清洁组件,给水组件包括底座,底座的后端转动连接有一对行走轮,底座顶部固定连接有支撑架和水泵,支撑架上固定连接有过滤器、储液罐和增压罐;清洁组件包括清洁水管、辅助装置和冲刷头,过滤器、水泵、储液罐、增压罐和清洁水管通过水管依次连接,辅助装置包括延长杆,冲刷头固定连接在延长杆的顶端,清洁水管的出水口与冲刷头连通;本发明结构简单、操作简便,能够降低高空玻璃清洁的风险和清洁成本,提高清洁效率。