
六自由度教学机器人手臂系统研究的中期报告.docx

快乐****蜜蜂


1/1
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

六自由度教学机器人手臂系统研究的中期报告.docx
六自由度教学机器人手臂系统研究的中期报告尊敬的评委:我将就六自由度教学机器人手臂系统研究的进展情况向您做中期报告。目前,我已经完成了该系统的系统设计与机械结构设计。将该系统的机械结构进行了简化,采用了基于机械臂结构的设计方案。该方案设计了一套四杆机构,结构简单并且稳定,在保证六自由度高灵活性的同时,机器人臂运动控制系统的实现成为了可能。在电气控制方面,我们已经开始进行控制算法的编写,并确定了采用PID控制策略。我们还在进行由传感器信号到电机控制信号的转换设计,并将这些信号传输到足够精准的电机控制系统中,从
六自由度机器人手臂.pdf
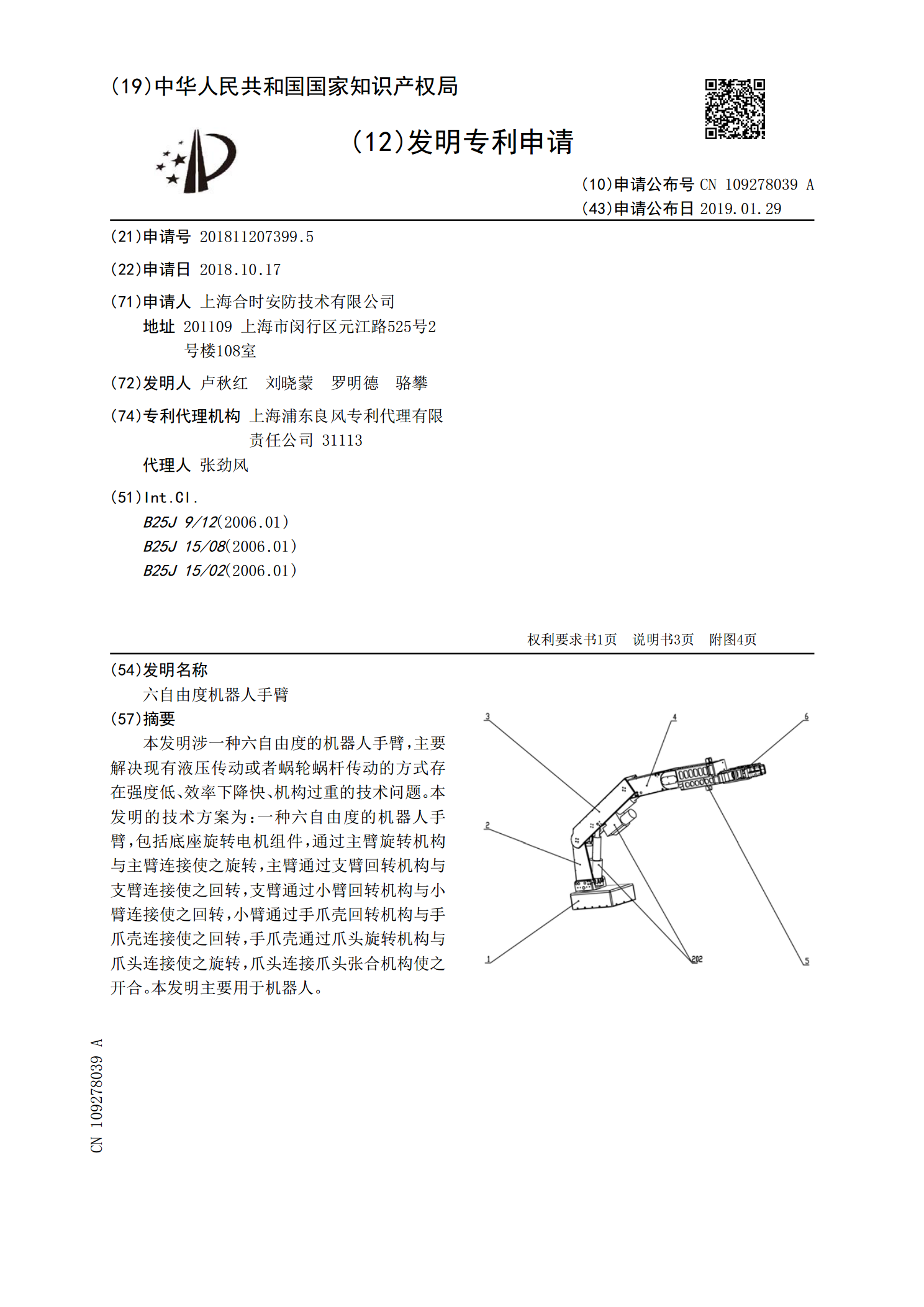
本发明涉一种六自由度的机器人手臂,主要解决现有液压传动或者蜗轮蜗杆传动的方式存在强度低、效率下降快、机构过重的技术问题。本发明的技术方案为:一种六自由度的机器人手臂,包括底座旋转电机组件,通过主臂旋转机构与主臂连接使之旋转,主臂通过支臂回转机构与支臂连接使之回转,支臂通过小臂回转机构与小臂连接使之回转,小臂通过手爪壳回转机构与手爪壳连接使之回转,手爪壳通过爪头旋转机构与爪头连接使之旋转,爪头连接爪头张合机构使之开合。本发明主要用于机器人。

六自由度教学机器手臂控制系统的研究的中期报告.docx
六自由度教学机器手臂控制系统的研究的中期报告一、主要研究内容本研究旨在设计和实现一个六自由度教学机器手臂控制系统。该系统将包括硬件和软件两个部分。硬件部分将包括机械臂、驱动器、传感器等组件。软件部分将包括控制算法、用户界面等。主要研究内容如下:1.机械臂设计:根据机器手臂的使用需求,设计机械结构。此阶段需要进行机械结构的绘制,并进行力学分析。2.传感器系统:安装传感器以测量机械臂的姿态和运动轨迹。本研究将使用惯性测量单元(IMU)和编码器。3.驱动器设计:设计合适的驱动器,以控制机械臂的六个自由度运动。4

六自由度教学机器人的设计与研究的中期报告.docx
六自由度教学机器人的设计与研究的中期报告本报告介绍了我们在设计和研究六自由度教学机器人方面取得的进展。我们按照以下顺序进行了探讨:1.研究目的和背景2.机器人的机构设计3.机器人的运动学分析4.机器人的控制系统设计5.结论和下一步计划研究目的和背景:在工业生产和服务行业中,六自由度机器人可用于自动化和高精度控制过程。在教育和学习中,它可以作为一种交互式工具,使学生更好地理解机器人的运动学和控制。因此,我们旨在设计和研究一种可用于教学和研究的六自由度教学机器人。机器人的机构设计:六自由度机器人的机构设计通常

冗余自由度弧焊机器人系统研究的中期报告.docx
冗余自由度弧焊机器人系统研究的中期报告1.研究目标本研究旨在研究冗余自由度弧焊机器人系统,探讨其在焊接过程中的优势和适用性,并将其应用于实际焊接场景中。2.研究内容2.1研究冗余自由度弧焊机器人的运动学和动力学模型,探究其优势和适用性。2.2研究冗余自由度弧焊机器人的路径规划和控制策略,提高其运动控制精度和焊接质量。2.3研究冗余自由度弧焊机器人在实际焊接场景中的应用性能,评估其优点和不足点。2.4设计冗余自由度弧焊机器人的实验平台,开展实验验证和性能测试。3.研究进展已完成以下工作:3.1完成冗余自由度