
激光焊缝表面质量全自动扫查检测装置及方法.pdf

雨巷****莺莺

1/10

2/10
3/10

4/10

5/10
6/10
7/10

8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

激光焊缝表面质量全自动扫查检测装置及方法.pdf
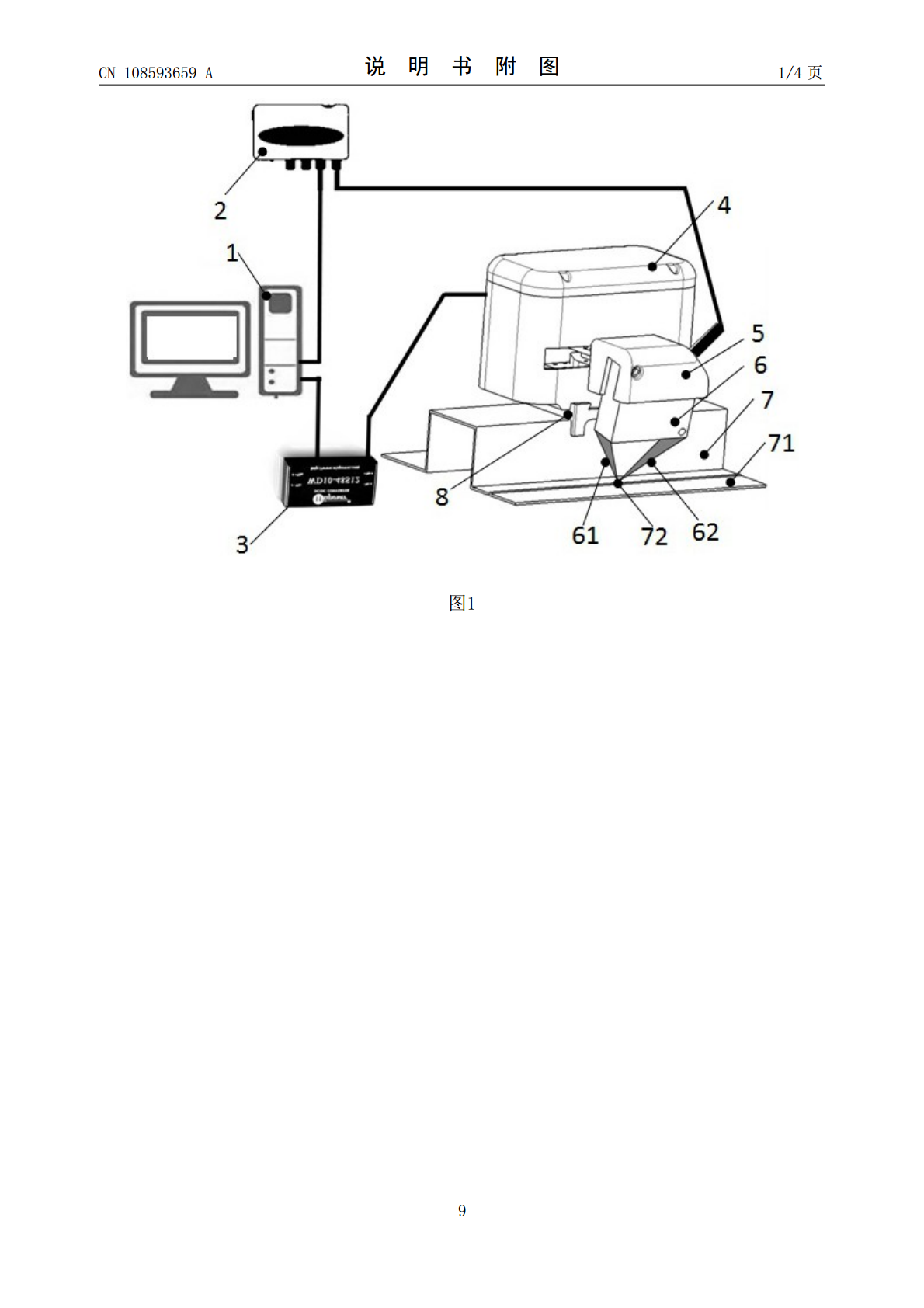
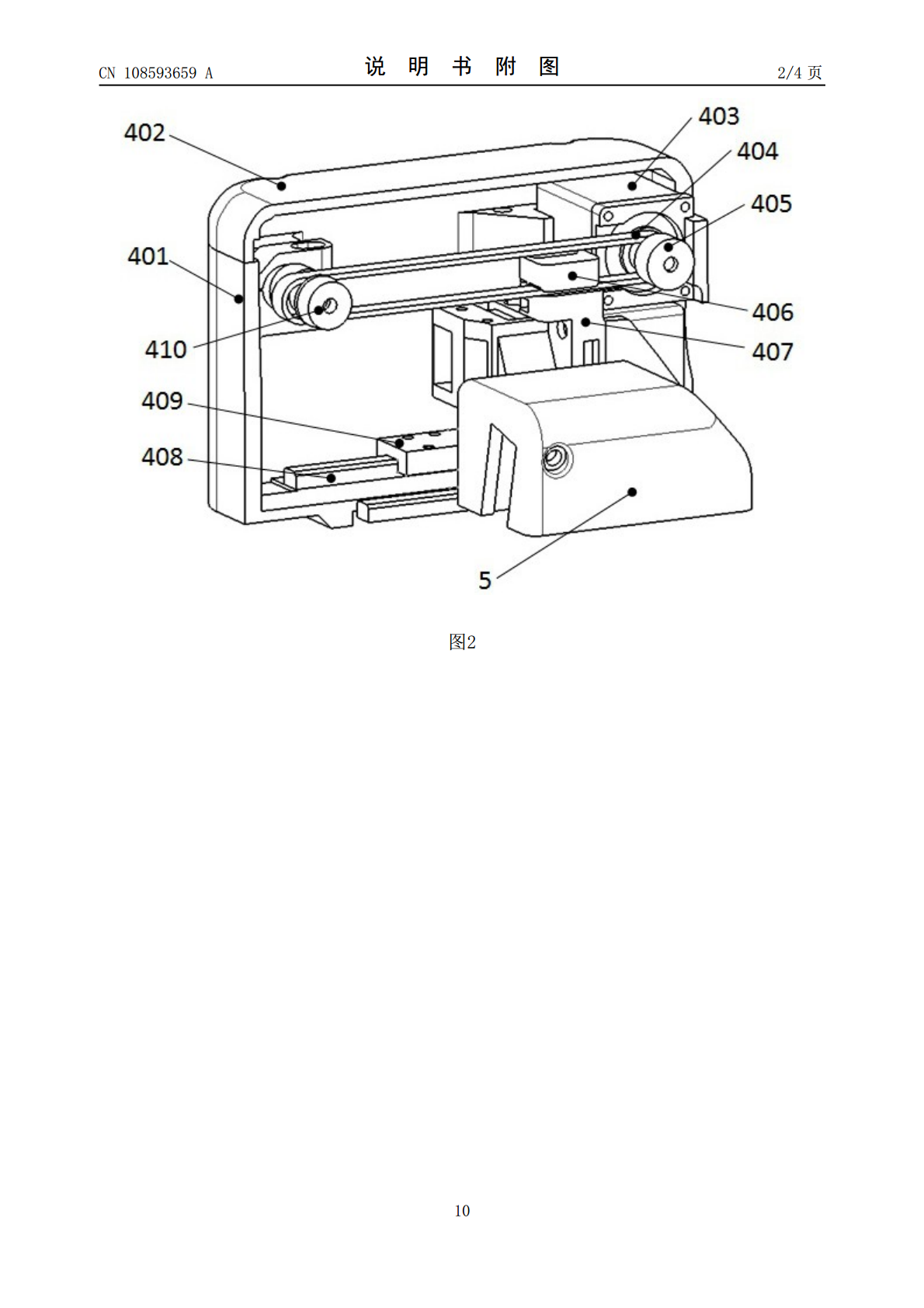
本发明涉及一种激光焊缝表面质量全自动扫查检测装置及方法,属于激光检测领域。激光测距传感器固定到传感器支架上;传感器支架与扫查驱动器相连,并在扫查驱动器的作用下向X、Y方向运动;扫查驱动器通过固定座固定在工件上;工业计算机通过电源线与电机驱动模块和扫查驱动器相连,同时工业计算机通过信号线与激光控制卡和激光测距传感器相连。优点在于:解决激光焊缝无损检测技术少,现有无损检测技术精度低,检测条件苛刻等问题,实现各种尺寸、宽度的激光焊缝的表面轮廓检测,并通过计算机拟合形成的图像,对工艺的稳定性和激光焊缝的质量进行评

焊缝超声检测扫查装置.pdf
本发明公开了一种焊缝超声检测扫查装置,包括主框架、与主框架相连接的滚轮机构以及设在主框架上的扫查机构,所述扫查机构包括斜向扫查机构,所述斜向扫查机构具有相对待检焊缝呈斜向配置的斜向扫查臂。所述主框架呈矩形,所述主框架的四个边均设有导轨,所述斜向扫查机构包括两个斜向扫查支架、连接于所述两个斜向扫查支架之间的斜向导轨和设于所述斜向导轨上的两个所述斜向扫查臂,其中一个斜向扫查支架跨设在主框架相邻两边的两个导轨上,另一个斜向扫查支架跨设在另外两个相邻边的两个导轨上。本发明提供的焊缝超声检测扫查装置,能有效解决现有

电子束焊缝的超声相控阵快速扫查装置和检测方法.pdf
本发明属于无损检测领域,涉及一种电子束焊缝的超声相控阵快速扫查装置和检测方法。本发明提出了一种电子束焊缝的超声相控阵快速扫查装置和检测方法,利用滚轮式编码器检测并传输相控阵探头的位置信息,实现相控阵的电子扫查,将二维扫查简化为一维扫查,大大提高检测效率;另一方面,通过控制不同组晶片的延时法则,控制声束形状,实现焊缝全厚度动态聚焦,避免了频繁更换探头;同时,采用接触法检测方法,避免了水浸或喷水扫查设备的使用,缩减了设备整体体积,使整套装置便于携带,方便进行外场检测。本发明的一个实施例,经实际检测证明,检测效
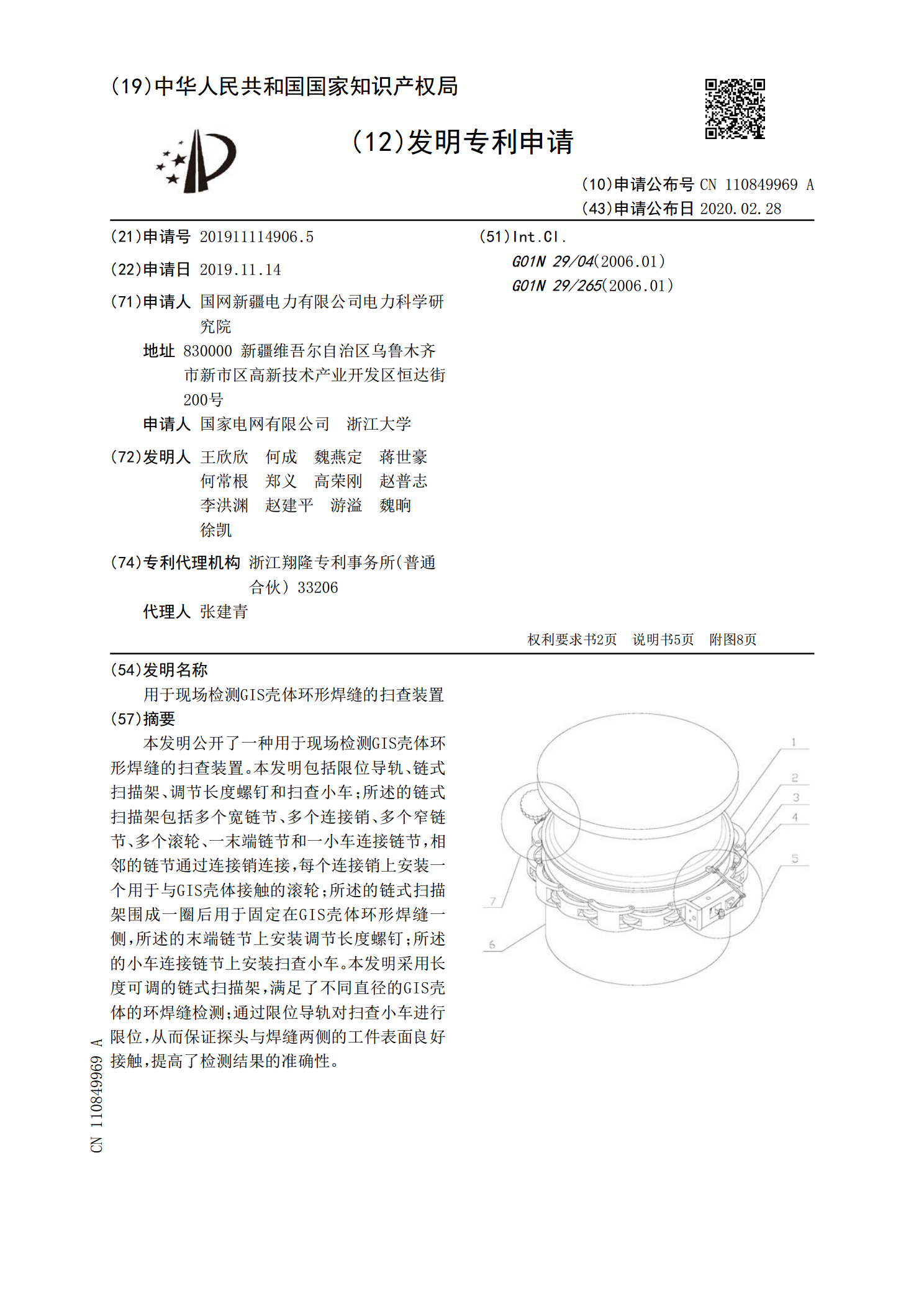
用于现场检测GIS壳体环形焊缝的扫查装置.pdf
本发明公开了一种用于现场检测GIS壳体环形焊缝的扫查装置。本发明包括限位导轨、链式扫描架、调节长度螺钉和扫查小车;所述的链式扫描架包括多个宽链节、多个连接销、多个窄链节、多个滚轮、一末端链节和一小车连接链节,相邻的链节通过连接销连接,每个连接销上安装一个用于与GIS壳体接触的滚轮;所述的链式扫描架围成一圈后用于固定在GIS壳体环形焊缝一侧,所述的末端链节上安装调节长度螺钉;所述的小车连接链节上安装扫查小车。本发明采用长度可调的链式扫描架,满足了不同直径的GIS壳体的环焊缝检测;通过限位导轨对扫查小车进行限

激光拼焊焊缝表面质量视觉检测系统研究.pptx
汇报人:CONTENTSPARTONEPARTTWO激光拼焊技术简介焊缝表面质量检测的重要性传统检测方法的局限性与不足研究目的与意义PARTTHREE激光拼焊技术原理焊缝表面质量标准与评价指标视觉检测系统的基本组成与工作原理关键技术与实现方法PARTFOUR系统总体架构与设计思路硬件选型与配置软件模块与功能划分系统集成与测试方案PARTFIVE实验数据来源与处理方法实验结果展示与对比分析结果误差分析结果可靠性评估PARTSIX研究成果总结技术创新点与贡献实际应用前景与潜在价值未来研究方向与展望汇报人: