
一种基于人工智能的家用机器人.pdf

茂学****23


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于人工智能的家用机器人.pdf
本发明公开了一种基于人工智能的家用机器人,涉及家用机器人技术领域,本发明包括机体,机体底面固定有一行走机构,机体周侧面固定有一折叠支架;行走机构包括壳体,壳体一内壁呈线性排列依次固定有调节行走轮、固定行走轮、调节万向轮和固定万向轮,本发明通过调节行走轮、固定行走轮、调节万向轮、固定万向轮、红外线传感器和控制器的配合使用,能够平稳的越过房间中门槛或者无法绕过的凸起,通过折叠支架、光伏组件、蓄电池和逆变器的配合使用,节约能源的同时能够将光伏组件的角度调节到最佳角度范围,解决了现有的基于人工智能的家用机器人无法

一种基于人工智能的家用洗衣机.pdf
本发明公开了一种基于人工智能的家用洗衣机,包括移动底座,移动底座的上端固定连接有缓冲箱,缓冲箱的内壁滑动连接有缓冲板,缓冲板的下端通过多个减震机构与缓冲箱的底部内壁固定连接,缓冲板的上端固定连接有洗衣机本体,洗衣机本体通过缓冲箱上端开设有的开口伸出缓冲箱外,缓冲板的上端与缓冲箱的顶部内壁之间固定连接有多个缓冲弹簧,移动底座为中空结构,且底部设有开口,移动底座的顶部内壁固定连接有伸缩气缸,伸缩气缸下端的输出轴固定连接有升降板,升降板的底部四角处均固定连接有万向轮。本发明使洗衣机本体的减震效果好,较好的避免了
一种基于人工智能的机器人.pdf
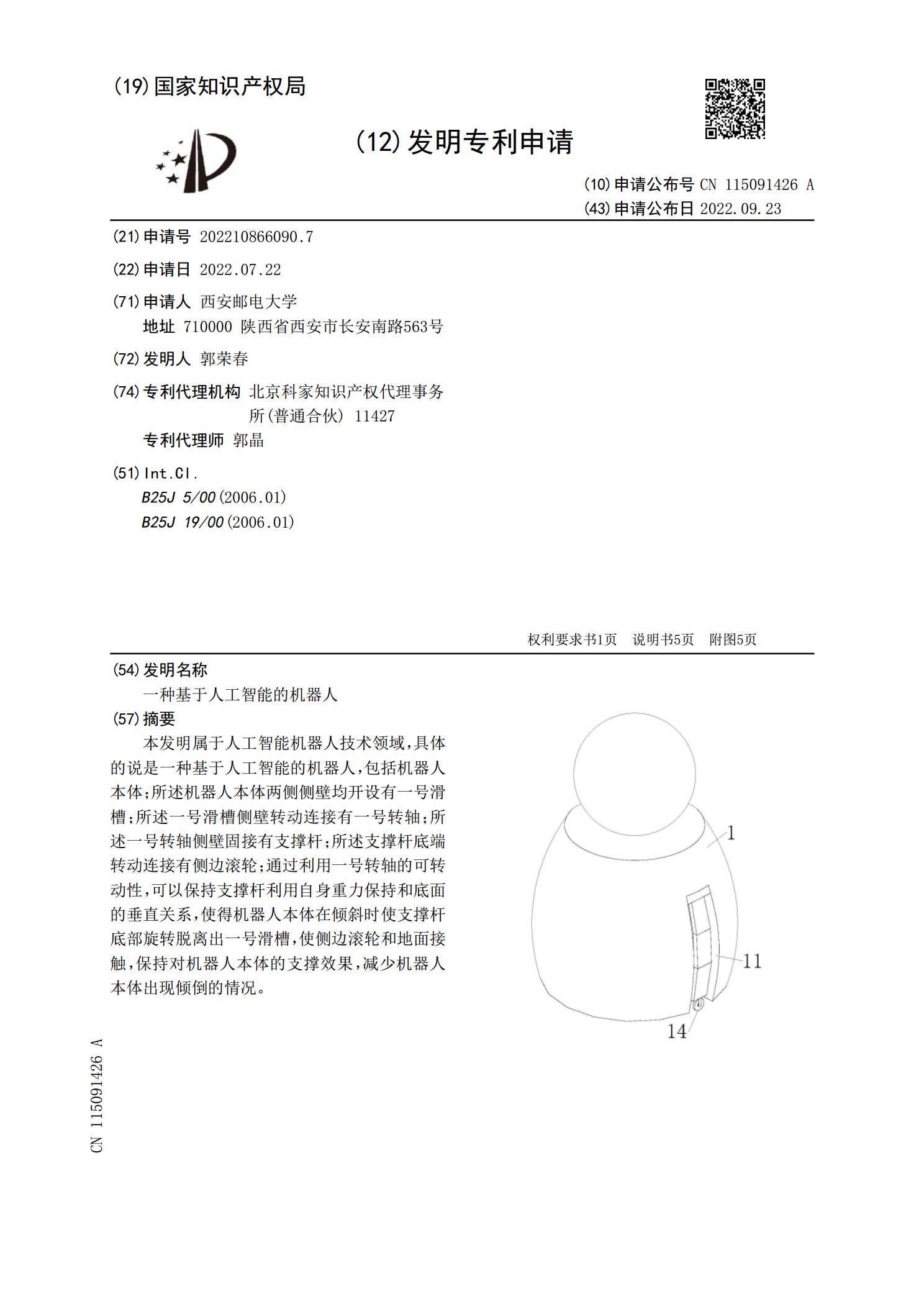
本发明属于人工智能机器人技术领域,具体的说是一种基于人工智能的机器人,包括机器人本体;所述机器人本体两侧侧壁均开设有一号滑槽;所述一号滑槽侧壁转动连接有一号转轴;所述一号转轴侧壁固接有支撑杆;所述支撑杆底端转动连接有侧边滚轮;通过利用一号转轴的可转动性,可以保持支撑杆利用自身重力保持和底面的垂直关系,使得机器人本体在倾斜时使支撑杆底部旋转脱离出一号滑槽,使侧边滚轮和地面接触,保持对机器人本体的支撑效果,减少机器人本体出现倾倒的情况。

一种基于wifi网络的家用监控机器人.pdf
一种基于wifi网络的家用监控机器人,具体涉及一种基于wifi网络的监控服务类机器人。本发明目的是:解决现有家用监控机器人移动不平稳、越障能力不足,移动距离有限、监控功能较少,制作成本较高等问题。一种基于wifi网络的家用监控机器人,包括:移动机构、第一机架、第二机架、三自由度云台、主控板、wifi模块、监控终端等。所述第一机架置于移动机构底盘上,第一机架和底盘之间设有主控板,所述三自由度云台置于第一机架上,所述wifi模块置于第二机架上。本发明采用六轮移动机构,可以差速实现转向和零半径自转,采用双叉臂式

一种基于人工智能的拖地机器人.pdf
本发明属于智能家居设备技术领域,提供了一种基于人工智能的拖地机器人,包括机体,其底部设置有行走轮;第一驱动装置,其设置在所述机体内以驱动所述行走轮转动;以及拖地装置,所述拖地装置设置在所述机体上;所述拖地装置包括拖布单元、安装壳、第二驱动装置和联接装置。本发明所提供的一种基于人工智能的拖地机器人,具有更好的拖地效果。