
一种湿地污染净化处理装置.pdf

努力****妙风


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种湿地污染净化处理装置.pdf
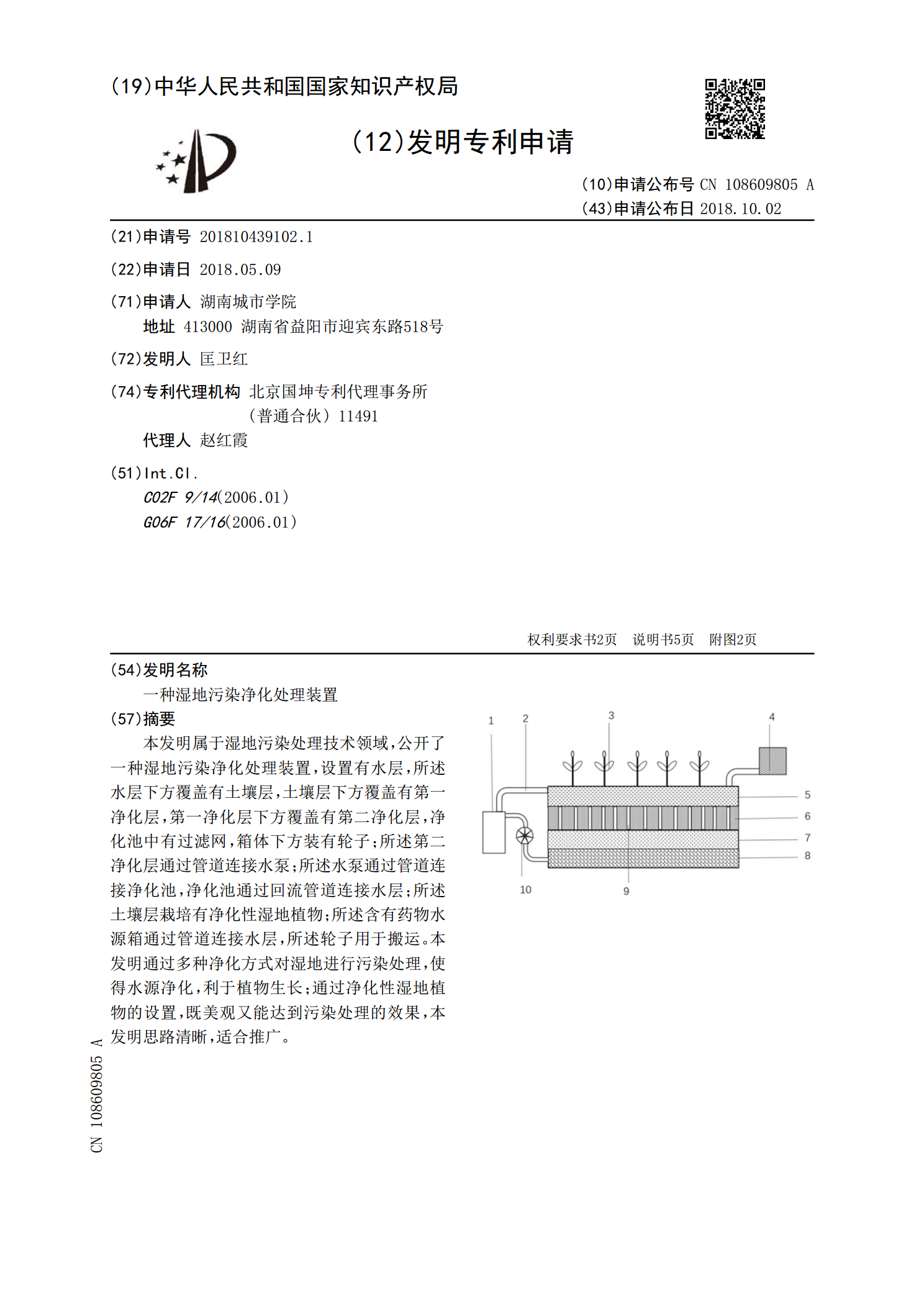
本发明属于湿地污染处理技术领域,公开了一种湿地污染净化处理装置,设置有水层,所述水层下方覆盖有土壤层,土壤层下方覆盖有第一净化层,第一净化层下方覆盖有第二净化层,净化池中有过滤网,箱体下方装有轮子;所述第二净化层通过管道连接水泵;所述水泵通过管道连接净化池,净化池通过回流管道连接水层;所述土壤层栽培有净化性湿地植物;所述含有药物水源箱通过管道连接水层,所述轮子用于搬运。本发明通过多种净化方式对湿地进行污染处理,使得水源净化,利于植物生长;通过净化性湿地植物的设置,既美观又能达到污染处理的效果,本发明思路清

一种治理河道水污染的净化处理装置.pdf
本发明公开了一种治理河道水污染的净化处理装置,涉及河道水污染治理技术领域。本发明包括净化箱、曝气泵、曝气管和两紫外灯管,净化箱内部分别开设有脱水腔和净化腔;脱水腔与净化腔连通处固定设置有分液阀;脱水腔内部通过轴承转动连接有脱水筒;脱水筒底面固定连接有两导向杆和两液压杆;两导向杆和两液压杆一端固定连接有料门;两导向杆周侧面套设有复位弹簧。本发明通过脱水腔和净化腔的设计,使该装置在污水过滤过程中,能够集中对过滤出的漂浮物进行脱水处理,通过脱水能够有效去除残留在漂浮物中的污水,继而避免传统污水净化装置存在污水残

一种环境污染物的净化处理装置.pdf
本发明涉及环保技术领域,且公开了一种环境污染物的净化处理装置,包括箱体,所述箱体内部的中部固定安装有组隔板,所述组隔板顶部的中部固定安装有抽气扇,所述抽气扇的顶部固定安装有送气管,所述箱体内部顶部的左端固定安装有活性炭板,且箱体内部顶部的右端固定安装有紫外线灯。该环境污染物的净化处理装置,通过设置有箱体、双层密致滤网板与活性炭板等达到处理简单与净化彻底的目的,有害气体通过注气管注入到其中后,随后经过水洗灰尘留置、双层密致滤网板过滤处理、多层活性炭板过滤处理,最后再由紫外线灯与光触媒设备处理工作,该有害气体

河网源水处理湿地的污染净化过程及其调控途径.pptx
,目录PartOnePartTwo湿地的定义与分类湿地的主要功能河网源水处理湿地的意义PartThree湿地对污染物的去除机制湿地植物的净化作用湿地微生物的净化作用湿地的水文过程对净化效果的影响PartFour湿地植被的优化配置湿地微生物的调控水文条件的调控湿地水质的监测与预警系统建立PartFive河网源水处理湿地的应用现状河网源水处理湿地的技术发展前景河网源水处理湿地的实际应用挑战与解决方案PartSix研究结论研究不足与展望THANKS
一种净化处理镉污染灌溉水的河滨带人工湿地的方法.pdf
本发明公开了一种净化处理镉污染灌溉水的河滨带人工湿地的方法,步骤是:A、地点选择;选择水流比较平缓、距离灌溉水取水口比较近的河段;B、河槽加固;在河槽的左右两侧,采用浆砌石加固,保留原有河槽的行洪功能;C、岸坡整治;采用浆砌石挡墙对左右堤岸进行基础加固;D、河道清淤;对淤滩进行基底改造;E、湿地床填充;自下而上依次分层填入生石灰石、斜发沸石、炉渣、河砂和土壤;F、新建潜坝;在人工湿地末端构筑潜坝,顺接下游河道,潜坝中间安装预制排沙孔;G、植物配置;H、人工湿地养护管理。不占用农田、去除效率高、运行成本低