
一种高效环保的雾霾净化设备及控制方法.pdf

Th****s3


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种高效环保的雾霾净化设备及控制方法.pdf
本发明属于雾霾清理领域,公开了一种高效环保的雾霾净化设备及控制方法,外壳上通过螺栓固定有电动机、电源、注水口、控制器,外壳上卡接有雷达探测器、红外线传感器、信号发射接收器,外壳上焊接有管道,外壳内部卡接有水箱;管道一端与高压水泵胀接,管道另一端卡接有高压喷雾喷头;轮胎通过轴与外壳连接,并与电动机通过齿轮连接。该发明的雷达探测器大大提高了运行速度,为远程控制和安全控制提供保证;该发明设置有高压水泵,可以将水雾喷洒到高空,进而可以实现对雾霾的清理;该发明可以进行移动位置,对大范围内的雾霾进行清理,同时实现了远
一种高效环保的空气雾霾净化系统.pdf
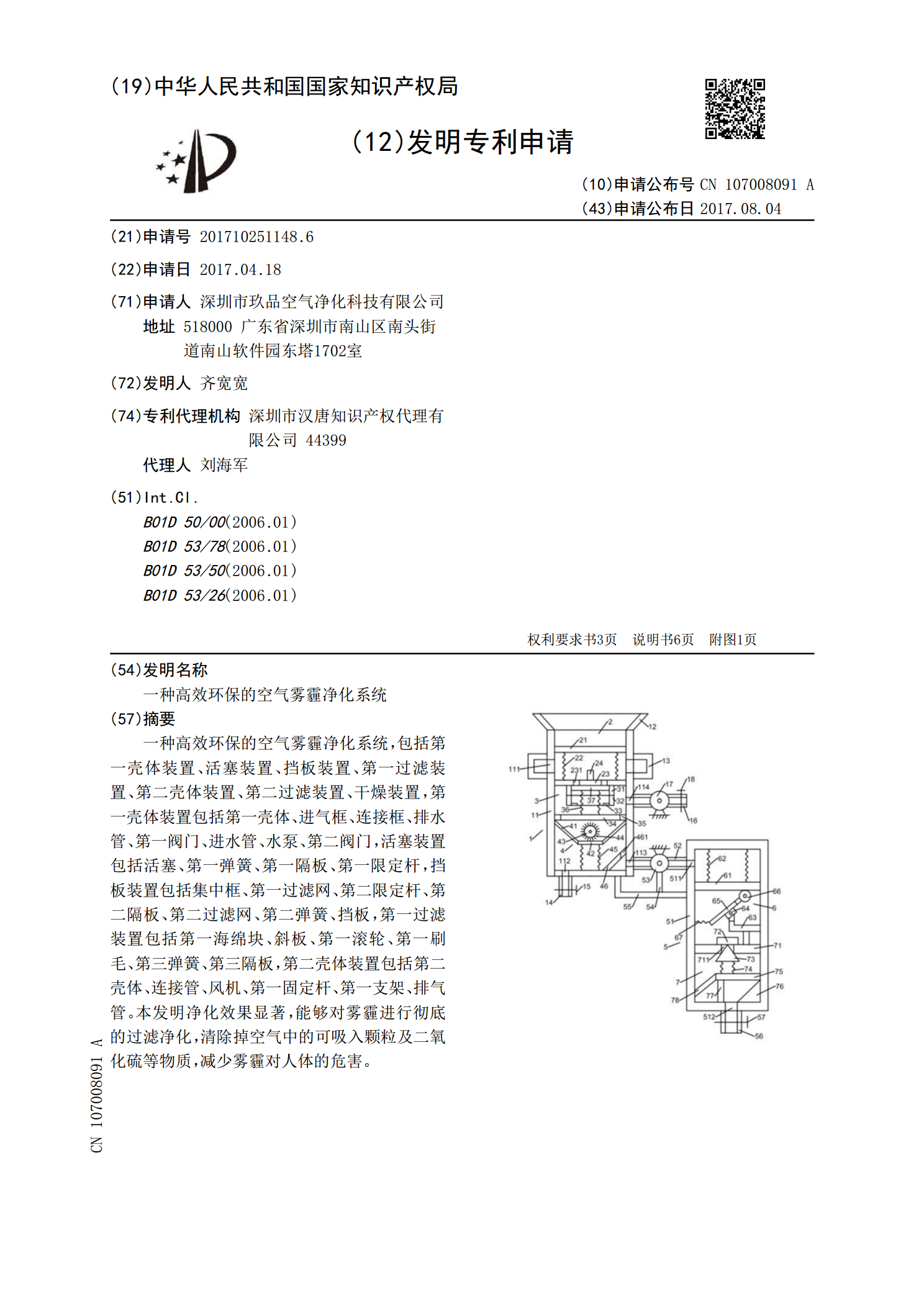
一种高效环保的空气雾霾净化系统,包括第一壳体装置、活塞装置、挡板装置、第一过滤装置、第二壳体装置、第二过滤装置、干燥装置,第一壳体装置包括第一壳体、进气框、连接框、排水管、第一阀门、进水管、水泵、第二阀门,活塞装置包括活塞、第一弹簧、第一隔板、第一限定杆,挡板装置包括集中框、第一过滤网、第二限定杆、第二隔板、第二过滤网、第二弹簧、挡板,第一过滤装置包括第一海绵块、斜板、第一滚轮、第一刷毛、第三弹簧、第三隔板,第二壳体装置包括第二壳体、连接管、风机、第一固定杆、第一支架、排气管。本发明净化效果显著,能够对雾

一种环保领域的雾霾消除净化设备.pdf
本发明涉及环保技术领域,具体为一种环保领域的雾霾消除净化设备,包括机体外壳,此环保领域的雾霾消除净化设备结构简单,开启电源开关,第一风机启动,将外界的雾霾空气吸入,蜂窝过滤网对雾霾进行初步过滤;电机启动,带动第二带轮转动,缺齿轮间歇啮合直齿条,带动直齿条下端连接的毛刷向左下方运动,清理蜂窝过滤网上端的较大颗粒,同时将较大颗粒推入灰尘收集箱中;电机启动带动凸轮转动,带动活塞在液压缸内向下滑动,压动液压缸内的清洁水向下运动,从喷头的多个喷嘴中喷出水雾中和雾霾空气中剩余的较小颗粒,通过活性炭层,吸除空气中水和雾

室内室外大型高效雾霾净化机.pdf
本发明的目的是克服现有技术的不足,提供了室内室外大型高效雾霾净化机两种机型,利用家用不锈钢丝清洁球的密集结构,采用蜂巢状不锈钢筒的3米深度,利用喷淋水由上到下的渗透浸湿,在轴流风机的强制作用下,使雾霾空气由下到上通过这一过滤区域,形成一个湿性过滤器,PM2.5被钢丝表面水吸附并随水下行,同时不锈钢丝自身也得到净化。室外机上部增设脱离细小水滴装置,形成室内机。

一种高效率的防雾霾空气净化器.pdf
本发明涉及一种高效率的防雾霾空气净化器,包括窗帘机构、PLC、PM2.5检测仪、第一空气存储机构和第一空气存储机构,所述窗帘机构包括连接膜及设置在连接膜上的固定板、装订孔、第一魔术贴、第二魔术贴、第一通气管、第二通气管、充气管、出气管和出气孔,所述第一空气存储机构包括第一电磁阀、第二电磁阀、第一空气泵和储气罐,通过PM2.5检测仪检测空气质量,把洁净度高的空气存储在第一空气存储机构,在模拟音频信号输出模块中,音频信号放大电路中,通过第一集成电路的超低噪声和高精密的特性,不仅保证了音频信号的可靠放大,还提高