
永磁同步曳引机驱动控制关键技术研究与实现的开题报告.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

永磁同步曳引机驱动控制关键技术研究与实现的开题报告.docx
永磁同步曳引机驱动控制关键技术研究与实现的开题报告一、题目永磁同步曳引机驱动控制关键技术研究与实现二、研究背景地铁、高铁等轨道交通的快速发展不仅依赖于先进的车辆设计和建筑工程,同时与控制技术的进步密不可分。目前,主要的轨道交通驱动系统采用机械式过程来装置其动力系统。然而,这些系统具有复杂的布局和高成本,同时机械传动系统部分的易损性也造成了维护上的困难。永磁同步曳引机(PMSM)是一种非常适合轨道交通的电机类型。其优点包括高效率、低维护成本、长寿命、高扭矩密度和高功率密度等。因此,它已经成为替代原有机械驱动

基于永磁同步无齿轮曳引机的电梯节能驱动与控制系统设计与实现.docx
基于永磁同步无齿轮曳引机的电梯节能驱动与控制系统设计与实现随着科学技术的不断进步,人们对于节能、环保等方面的要求越来越高。而电梯是现代城市中必不可少的交通工具,如果能在其节能方面有所提升,将会对环境保护和资源节约有着重要的意义。因此,本文将从永磁同步无齿轮曳引机的电梯节能驱动和控制系统的设计与实现两个方面进行探讨。一、永磁同步无齿轮曳引机的电梯节能驱动系统设计1、永磁同步驱动系统的原理简述永磁同步无齿轮曳引机是电梯节能驱动的一种重要方式。其核心是永磁同步电动机,通过直流电源(如电梯专用变频器)将交流电源转
用于别墅电梯驱动的永磁同步强制驱动曳引机.pdf
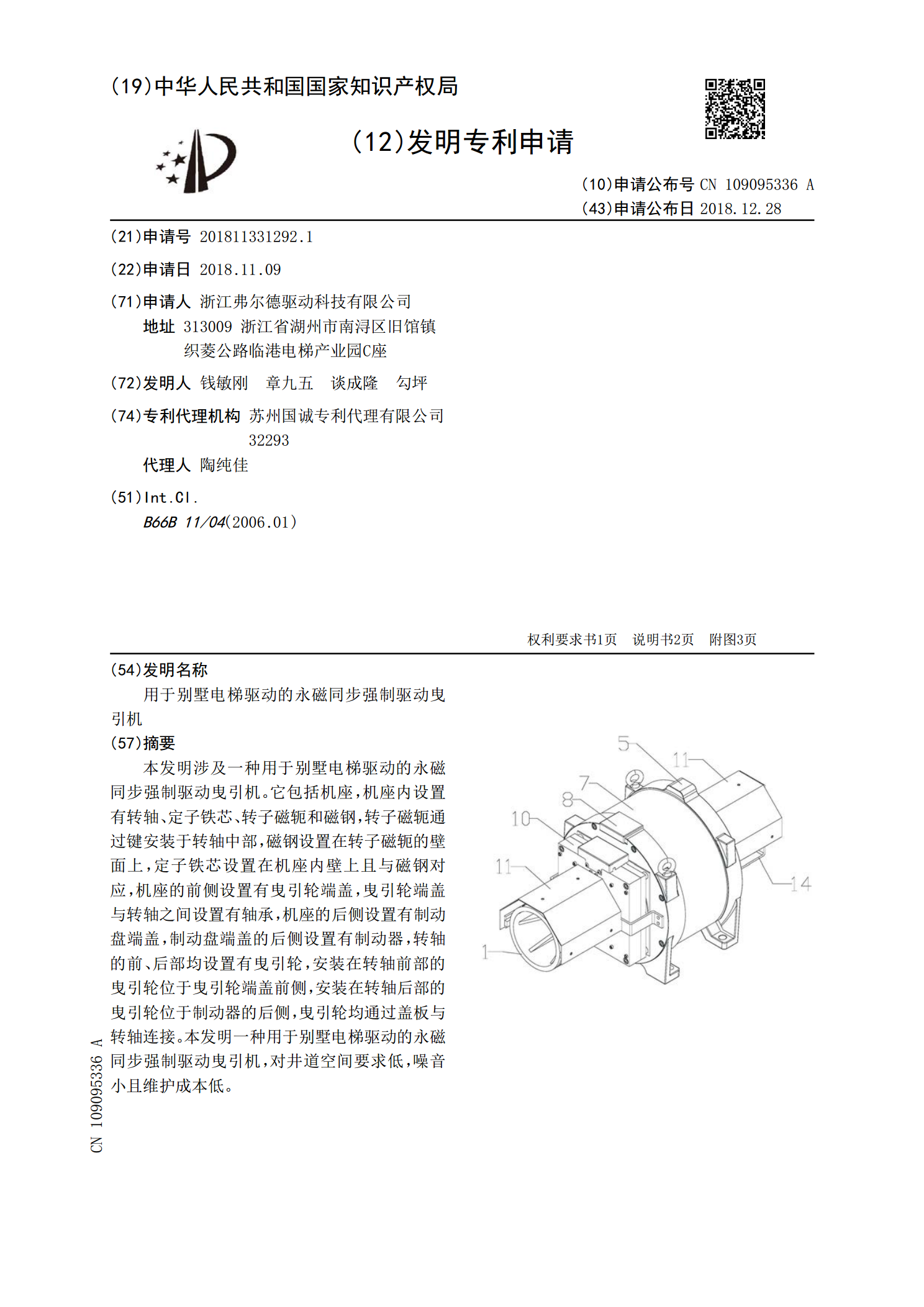
本发明涉及一种用于别墅电梯驱动的永磁同步强制驱动曳引机。它包括机座,机座内设置有转轴、定子铁芯、转子磁轭和磁钢,转子磁轭通过键安装于转轴中部,磁钢设置在转子磁轭的壁面上,定子铁芯设置在机座内壁上且与磁钢对应,机座的前侧设置有曳引轮端盖,曳引轮端盖与转轴之间设置有轴承,机座的后侧设置有制动盘端盖,制动盘端盖的后侧设置有制动器,转轴的前、后部均设置有曳引轮,安装在转轴前部的曳引轮位于曳引轮端盖前侧,安装在转轴后部的曳引轮位于制动器的后侧,曳引轮均通过盖板与转轴连接。本发明一种用于别墅电梯驱动的永磁同步强制驱动

电梯用新型永磁同步曳引机的研究的开题报告.docx
电梯用新型永磁同步曳引机的研究的开题报告一、选题背景及意义永磁驱动技术在电梯曳引机领域的应用正在逐步普及,与传统的异步电机相比,新型永磁同步曳引机具有体积小、重量轻、效率高、启动扭矩大等优点,以及电机维护周期长的特点。此外,新型永磁同步曳引机还能够通过电机控制器实现与楼层信号的智能匹配,使得电梯运行更加顺畅、安全,提高了电梯行业的整体技术水平。因此,对于永磁同步曳引机的研究具有十分重要的意义。二、研究目的本文以新型永磁同步曳引机为研究对象,旨在探讨其设计原理、工作过程、控制方式等多个方面,并建立数学模型和

基于永磁同步无齿轮曳引机的电梯节能驱动与控制系统设计与实现的任务书.docx
基于永磁同步无齿轮曳引机的电梯节能驱动与控制系统设计与实现的任务书任务书任务名称:基于永磁同步无齿轮曳引机的电梯节能驱动与控制系统设计与实现任务背景:随着经济的不断发展和城市的快速发展,电梯使用量逐年增加。电梯作为现代城市中已经不可或缺的重要交通工具,其对于城市居民的生活和工作带来了诸多的便利和方便性。由于电梯的运行对能源的消耗较大,因此,如何提高电梯的能源使用效率,减少能源的浪费就成了迫切需解决的问题。永磁同步无齿轮曳引机作为一种先进的电梯驱动技术,具有体积小、重量轻、效率高、运行平稳、噪音低、维修成本