
一种全自动取袋张口机械.pdf

努力****爱敏


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种全自动取袋张口机械.pdf
本发明实施例公开了一种全自动取袋张口机械,包括下张口机构、上张口机构和取袋臂,所述下张口机构后方固定设有储袋单元,所述储袋单元能够跟随下张口机构前后移动;所述上张口机构设于纵向移动机构上;所述下张口机构和上张口机构均设有黏胶机构,所述黏胶机构包括黏胶轮,所述黏胶轮上设有黏胶带,黏胶带的黏性面朝向远离黏胶轮一侧;所述取袋臂通过铰接座与摆动轴连接,所述取袋臂能够在摆动轴的驱动下前后摆动。本发明通过下张口机构、上张口机构和取袋臂实现包装袋的全自动取袋、张口和套接于下料机构中,节省人力的同时大大提升了下料速度,解
一种吨袋自动取放机械手及取袋方法.pdf
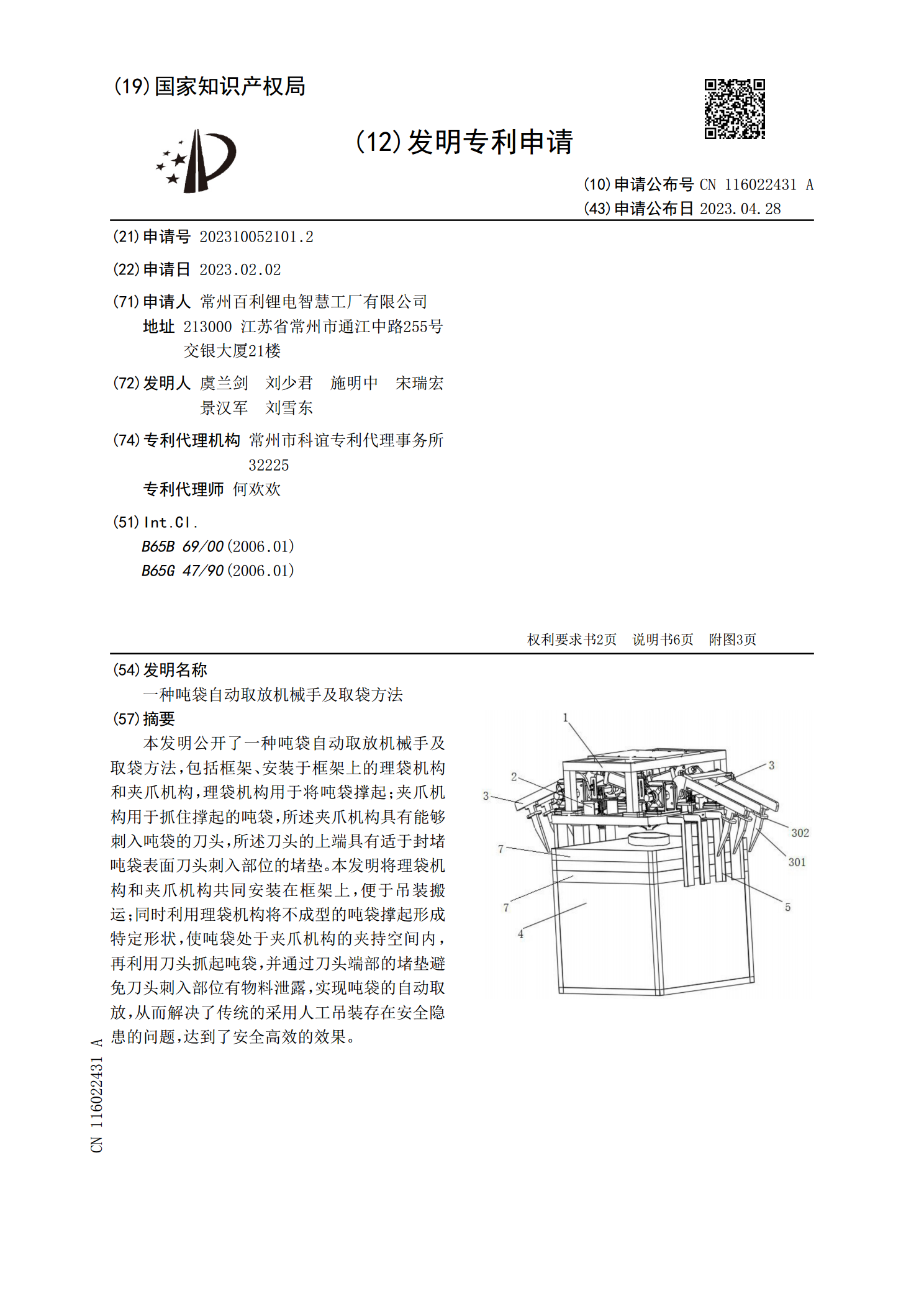
本发明公开了一种吨袋自动取放机械手及取袋方法,包括框架、安装于框架上的理袋机构和夹爪机构,理袋机构用于将吨袋撑起;夹爪机构用于抓住撑起的吨袋,所述夹爪机构具有能够刺入吨袋的刀头,所述刀头的上端具有适于封堵吨袋表面刀头刺入部位的堵垫。本发明将理袋机构和夹爪机构共同安装在框架上,便于吊装搬运;同时利用理袋机构将不成型的吨袋撑起形成特定形状,使吨袋处于夹爪机构的夹持空间内,再利用刀头抓起吨袋,并通过刀头端部的堵垫避免刀头刺入部位有物料泄露,实现吨袋的自动取放,从而解决了传统的采用人工吊装存在安全隐患的问题,达到

一种标本取物袋.pdf
本实用新型提供一种标本取物袋,该取物袋包括透明袋体,所述透明袋体限定出一个收容腔且其具有供标本投入的袋口,所述袋口具有环状边缘,所述透明袋体外部布置有能够估测收容腔内部样本体积的网格。

一种PTFE滤袋全自动缝纫制袋设备.pdf
本发明涉及PTFE滤袋生产领域,具体是涉及一种PTFE滤袋全自动缝纫制袋设备,包括工业缝纫机、平移驱动机构和支撑框组件,支撑框组件包括矩形支撑框、袋边压紧机构、袋身压紧机构和袋身牵平机构,袋边压紧机构与袋身压紧机构均包括有两个条形压板,两个条形压板的两端分别通过第一快捷拆装机构相连;所述矩形支撑框的边框上设有用于对袋身压紧机构进行临时固定的暂留机构。本发明通过人工将滤布对折后固定于支撑框组件上,通过支撑框组件将对折后待缝纫的滤布拉直,接着通过平移驱动组件带动支撑框组件整体平移,使对折后的履带两边匀速通过工

一种可以平稳的在供袋、取袋之间运转的供袋机构.pdf
本发明公开了一种可以平稳的在供袋、取袋之间运转的供袋机构,包括有安装座,安装座中安装有相互转动配合的链轮驱动轴和大摆臂轴,链轮驱动轴和大摆臂轴的一端分别安装有相互对应的摆臂,摆臂的下端部分别安装有摆臂滚子,摆臂滚子分别架设有与其滚动配合的供袋凸轮一和供袋凸轮二,大摆臂轴的另一端安装有大摆臂,大摆臂的上端转动安装在小摆臂轴上,小摆臂轴的一端安装有小摆臂,小摆臂上安装有两对应的由气缸驱动的取袋夹片,小摆臂轴的另一端安装有下链轮,链轮驱动轴的另一端安装有链轮。本发明综合了凸轮、链轮、齿轮等机构的性能于一体,结构