
自动控制仪表1.ppt

sy****28

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共27页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自动控制仪表1.ppt
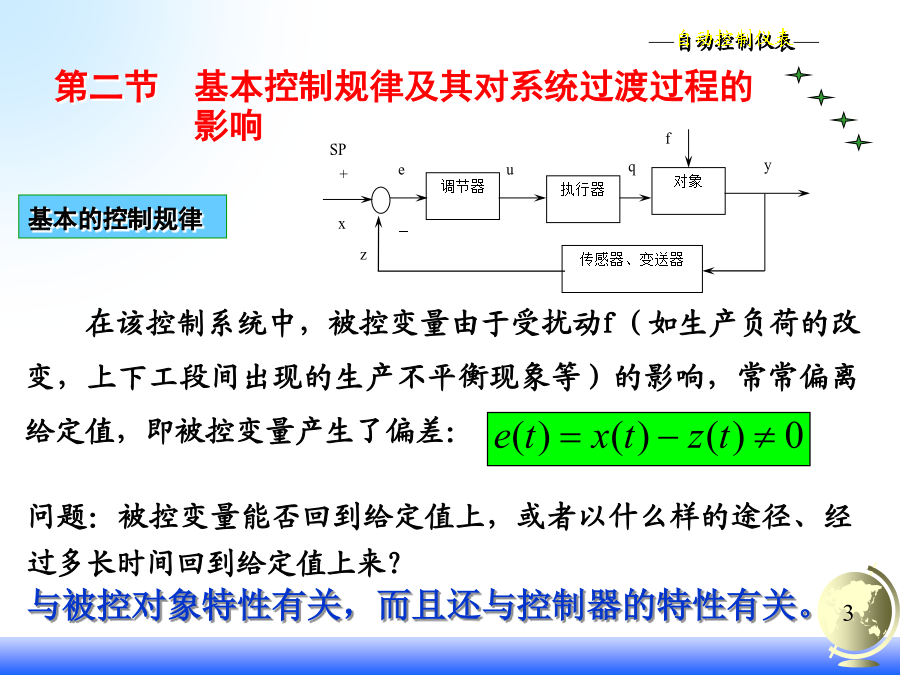
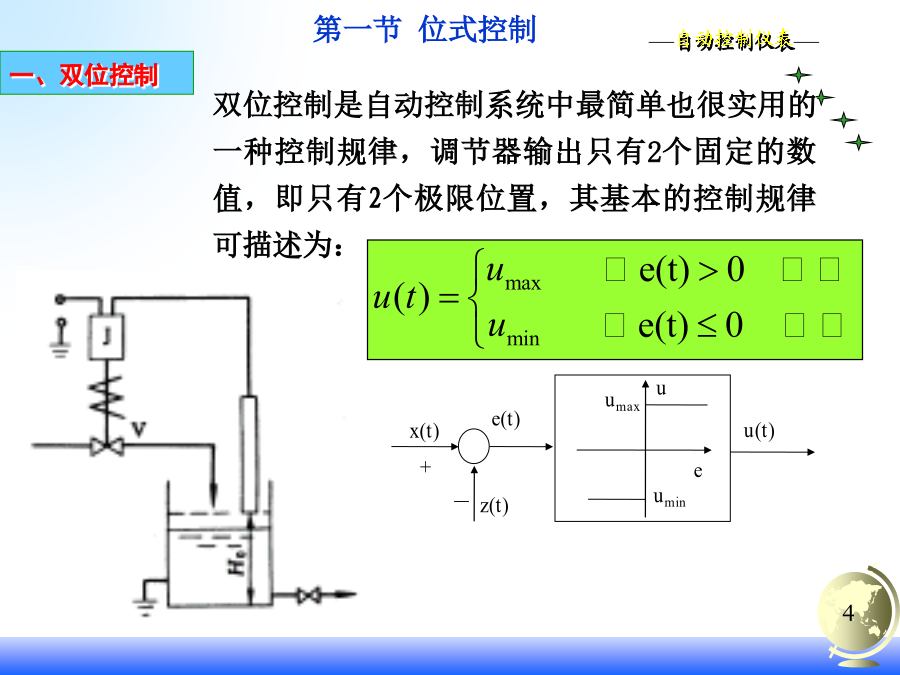
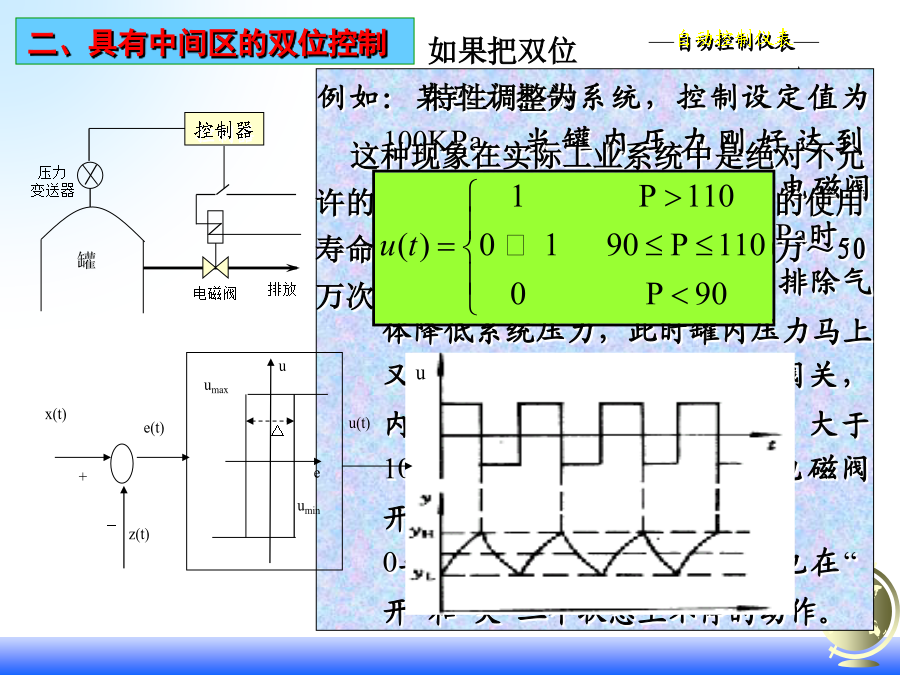
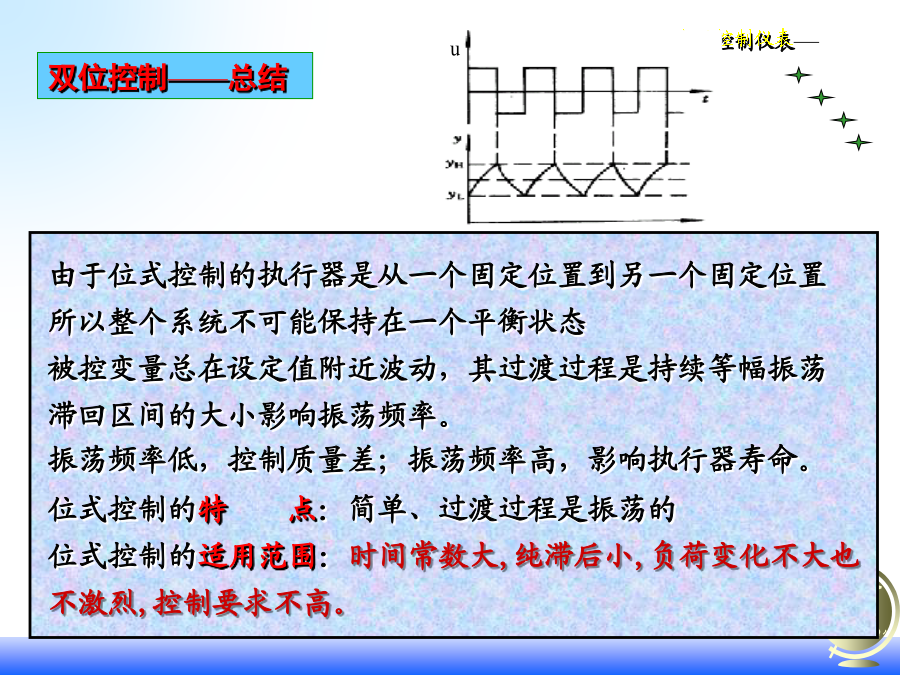
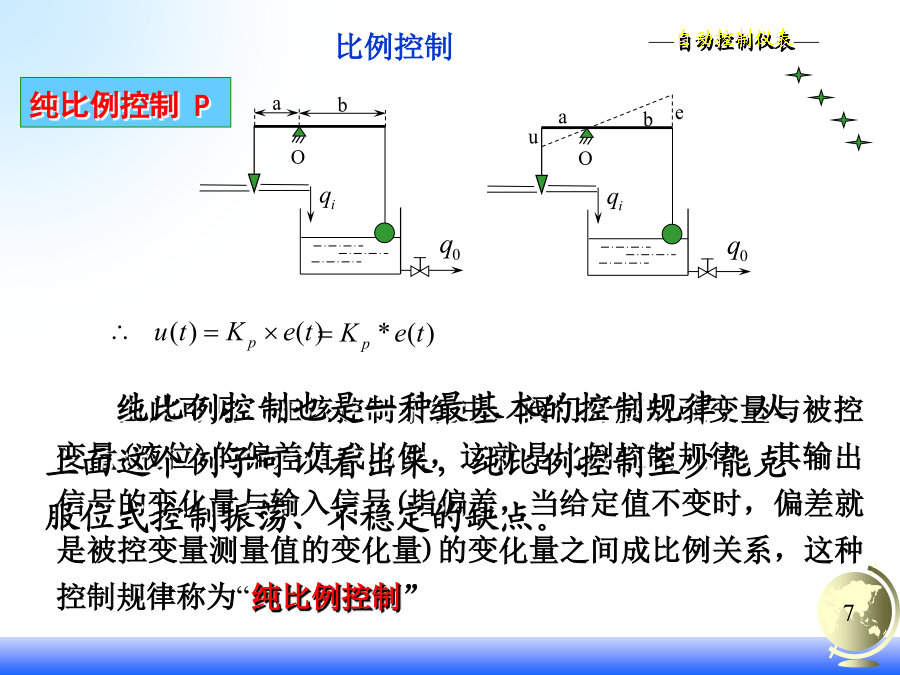
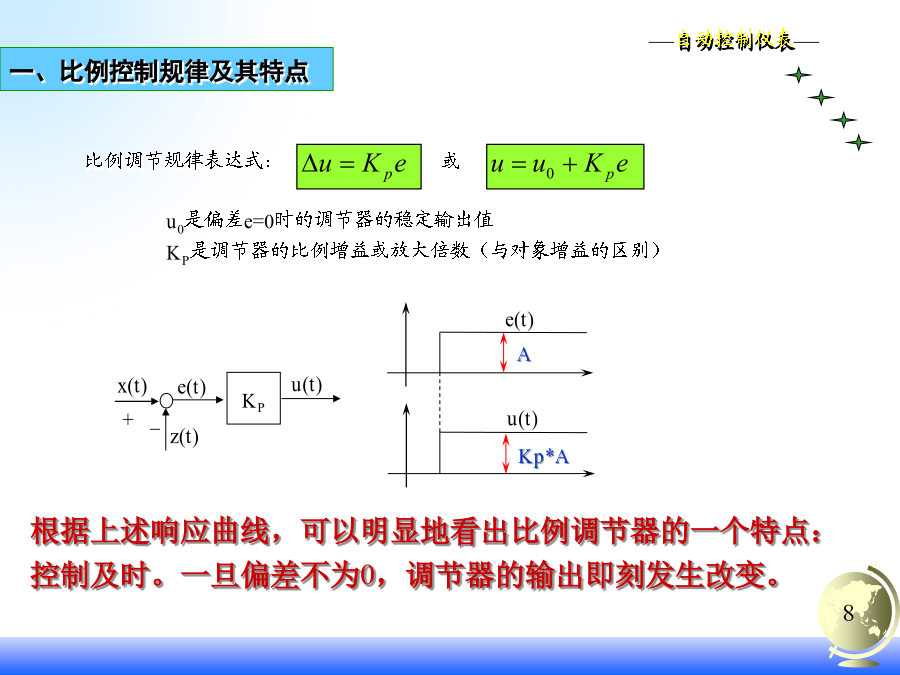
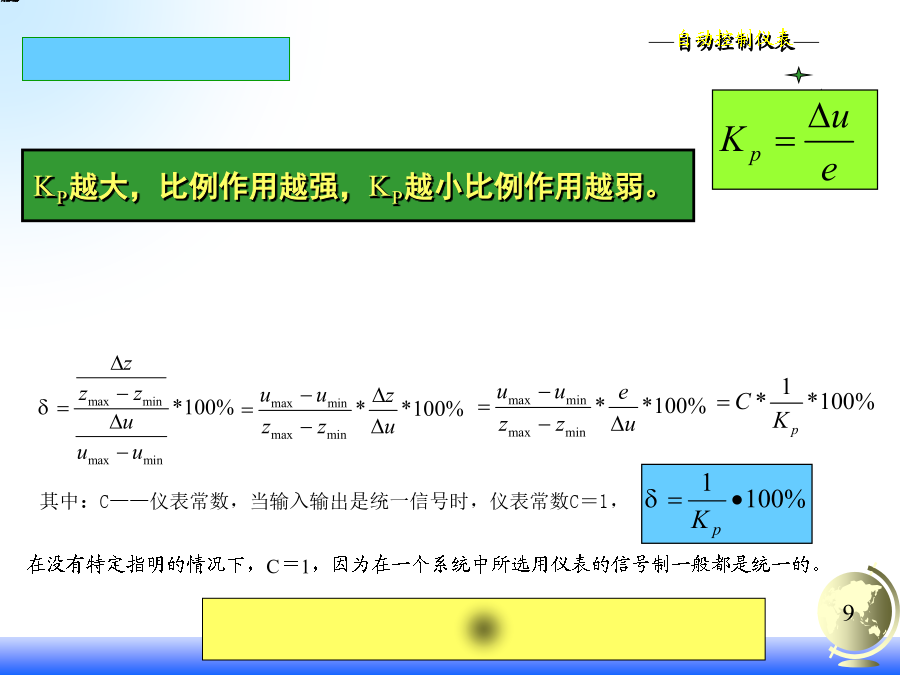
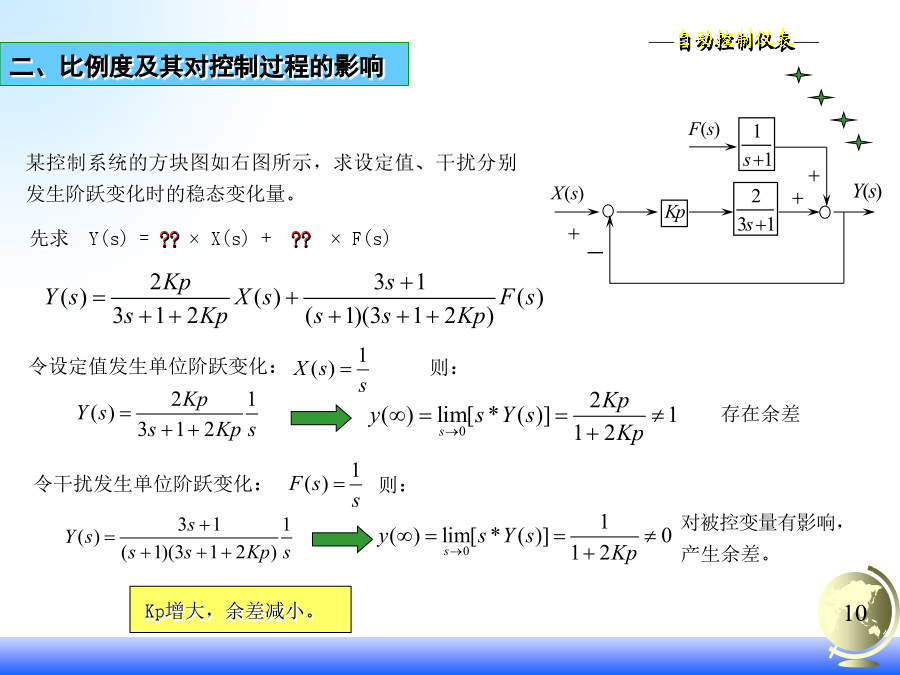
第五章自动控制仪表第一节概述三、控制仪表的分类:基地式控制仪表检测、控制、显示组合在一起的一类仪表。单元组合式控制仪表在系统规定的统一的通讯方式下,按要求给出相应的控制信号。计算机控制系统以计算机为中心控制单元,以测试仪表、执行机构等单元为外围设备的系统。第二节基本控制规律及其对系统过渡过程的影响双位控制是自动控制系统中最简单也很实用的一种控制规律,调节器输出只有2个固定的数值,即只有2个极限位置,其基本的控制规律可描述为:二、具有中间区的双位控制双位控制——总结纯比例控制P比例调节规律表达式:比例增益K

自动控制仪表.doc
在自动控制系统中广泛使用的控制器、变送器、运算器、执行器等按能源形式分类气动、电动、液动按结构形式分类1.基地式仪表2.单元组合式仪表3.集散控制系统(DCS)4.现场总线控制系统(FCS)气动仪表:20~100KPa电动仪表:模拟信号(0~10mA、4~20mA及1~5V)、数字信号、频率信号1、气体爆炸危险场所依据:爆炸性气体出现的频繁程度和持续时间0区(Zone0)-在正常情况下,爆炸性气体混合物连续地、频繁地出现或长时间存在的场所。1区(Zone1)-在正常情况下,爆炸性气体混合物有可能出现的场所

自动控制仪表.ppt
§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表左下图为简单水槽的比例控制系统的过渡过程。§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5自动控制仪表§5

自动控制仪表.docx
在自动控制系统中广泛使用的控制器、变送器、运算器、执行器等按能源形式分类气动、电动、液动按结构形式分类1.基地式仪表2.单元组合式仪表3.集散控制系统(DCS)4.现场总线控制系统(FCS)气动仪表:20~100KPa电动仪表:模拟信号(0~10mA、4~20mA及1~5V)、数字信号、频率信号1、气体爆炸危险场所依据:爆炸性气体出现的频繁程度和持续时间0区(Zone0)-在正常情况下,爆炸性气体混合物连续地、频繁地出现或长时间存在的场所。1区(Zone1)-在正常情况下,爆炸性气体混合物有可能出现的场所
第10章 自动控制仪表1.pdf
化学工业出版社www.cip.com.cn化工仪表及自动化第十章自动控制仪表化学工业出版社内容提要www.cip.com.cn自动控制仪表的作用与分类控制仪表的能源形式控制仪表的结构形式控制仪表的信号形式模拟式控制仪表概述DDZ-Ⅲ型电动控制器1化学工业出版社内容提要www.cip.com.cn数字式控制仪表概述可编程调节器的主要特点可编程调节器的基本构成及原理KMM可编程序调节器2化学工业出版社第一节控制仪表的作用与分类www.cip.com.cn控制仪表或称控制器,它将被控变量