
真空吸尘器.pdf

Jo****34

1/10
2/10
3/10
4/10
5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共96页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
真空吸尘器.pdf
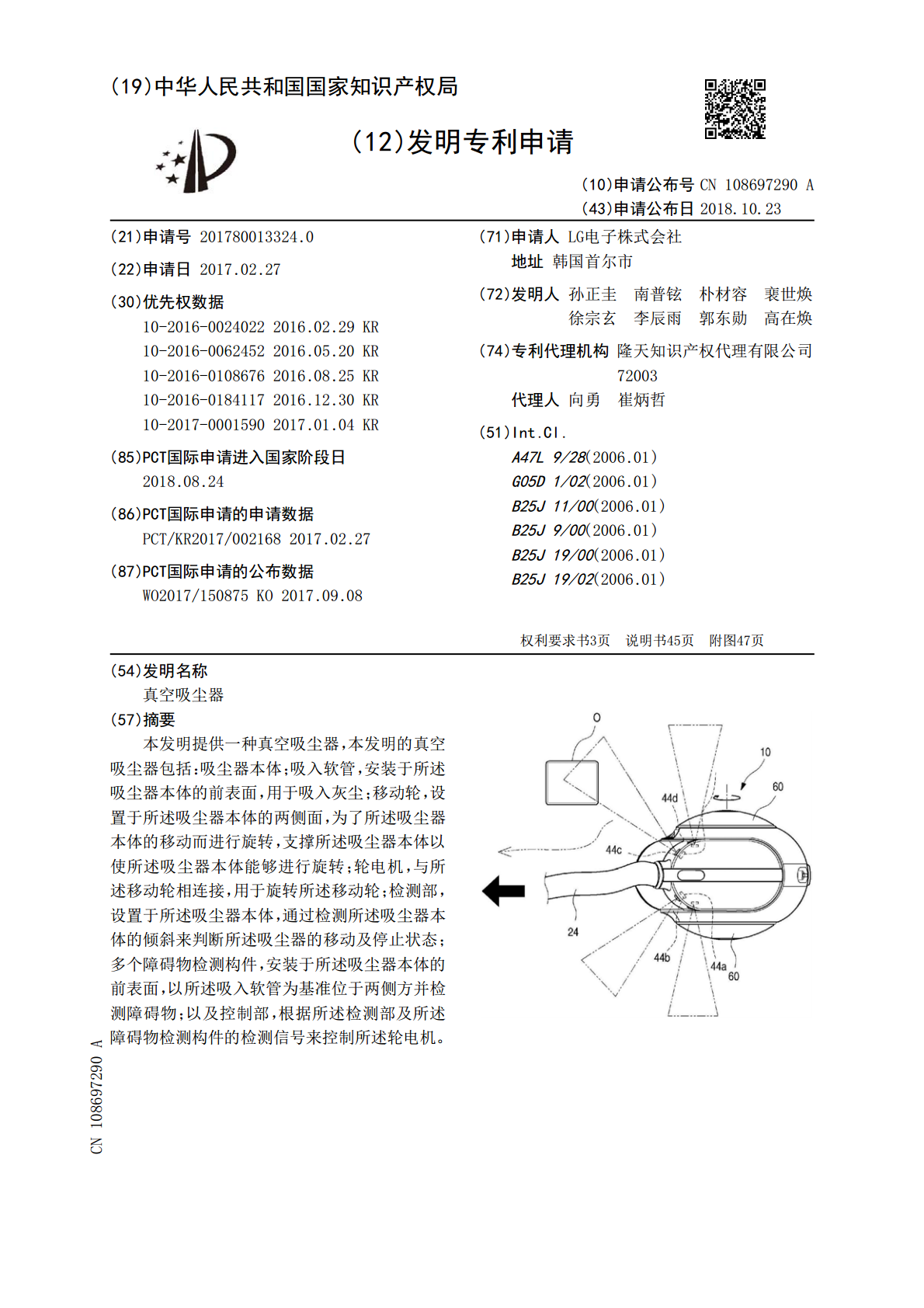
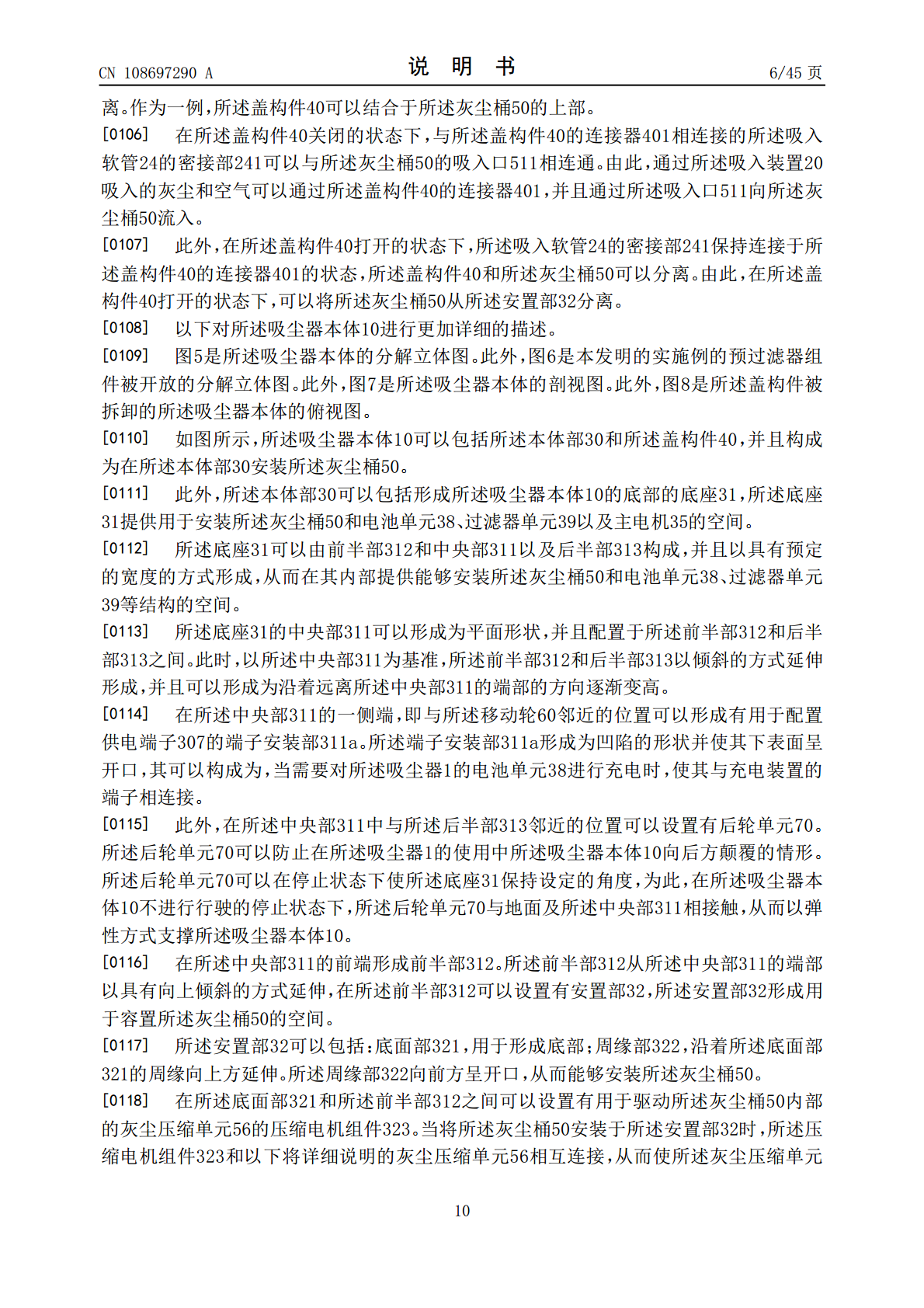
本发明提供一种真空吸尘器,本发明的真空吸尘器包括:吸尘器本体;吸入软管,安装于所述吸尘器本体的前表面,用于吸入灰尘;移动轮,设置于所述吸尘器本体的两侧面,为了所述吸尘器本体的移动而进行旋转,支撑所述吸尘器本体以使所述吸尘器本体能够进行旋转;轮电机,与所述移动轮相连接,用于旋转所述移动轮;检测部,设置于所述吸尘器本体,通过检测所述吸尘器本体的倾斜来判断所述吸尘器的移动及停止状态;多个障碍物检测构件,安装于所述吸尘器本体的前表面,以所述吸入软管为基准位于两侧方并检测障碍物;以及控制部,根据所述检测部及所述障碍

真空吸尘器.pdf
本发明公开了一种真空吸尘器,吸尘器的分离结构包括分离壳体和设在分离壳体内的分离组件,分离壳体上设有风机壳体,风机壳体内设有风机,风机壳体上设有用于排气的出气口,分离壳体与风机壳体之间设有过滤片,所述分离组件包括设在分离壳体内的分离筒、过滤网以及用于挡住分离出的脏物让赃物留置在分离壳体底部的挡片;所述分离筒为中空筒,分离筒的下端对应分离壳体底部,分离筒的上端对应过滤片;过滤网为环状过滤网,过滤网套在分离筒上;所述分离壳体内形成分离腔体,腔体底部用于存储分离的赃物,分离壳体上与输送管另一端连通口对应过滤网设置
真空吸尘器.pdf
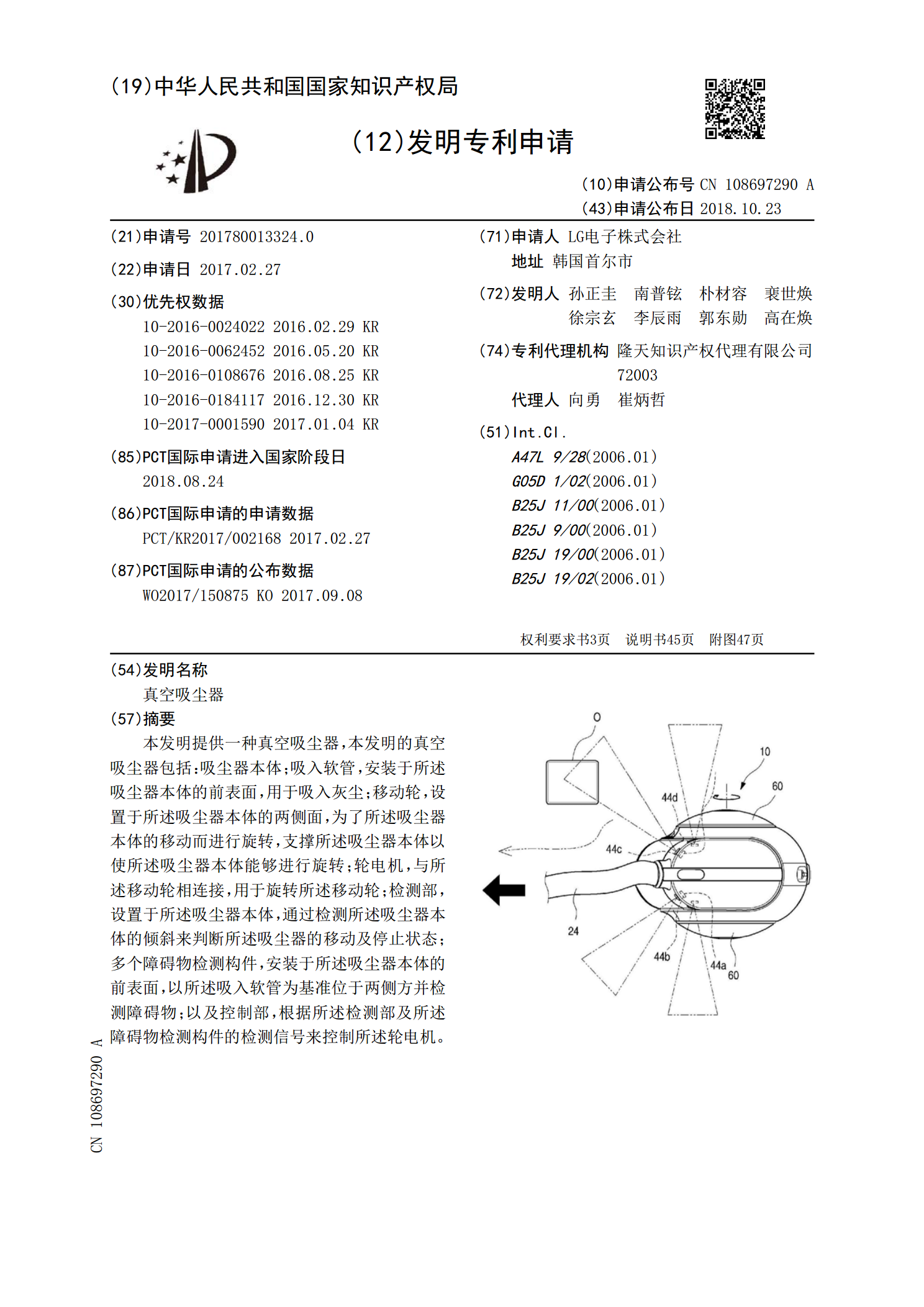
一种真空吸尘器,包括抽吸嘴,用于抽吸脏空气进入真空吸尘器,和出口,清洁空气可以通过该出口被从真空吸尘器排出;以及空气流动通道,从抽吸嘴延伸通过脏物分离器到所述出口。真空吸尘器还包括真空电机,布置为从抽吸嘴抽吸空气流通过真空吸尘器到所述出口,所述真空电机包括电动机和叶轮,其绕电机轴线旋转。真空吸尘器还包括电子视觉显示器,配置为显示与真空吸尘器相关的信息。真空电机被容纳在电机桶内,其被定位在流动通道中,且电子视觉显示器被安装到电机桶且由其支撑。

真空吸尘器.pdf
一种立式真空吸尘器,包括具有污浊空气入口12的地面接合头部11;回转安装到地面接合头部11的直立主体部10,用于在停止和使用位置之间移动;十字交叉可旋转安装在污浊空气入口12处的搅拌器13;通过电动机轴14驱动搅拌器的电动机;为了在第一和第二位置之间绕延伸平行于搅拌器轴13和电动机轴14的轴旋转而回转安装的滑轮组件15,该组件15包括通过第一驱动皮带18连接到电动机轴14和通过第二驱动皮带19连接到搅拌器13的惰轮16,惰轮16绕偏离组件15的旋转轴的轴旋转;以及外部操纵的脚踏板30。使用时,

真空吸尘器.pdf
本公开涉及真空吸尘器领域,具体涉及具有用于收集空气夹带的碎屑的过滤袋的真空吸尘器。本发明尤其涉及一种真空吸尘器,其减少了在更换过滤袋时在清洁期间收集的灰尘和污染物质向操作者的暴露。本发明提供了一种真空吸尘器,其包括与用于容纳滤筒的真空室流体连通的抽吸驱动单元,真空室本身由与管嘴连通的流体入口供给,当抽吸驱动单元操作时,空气经由管嘴被吸入真空室,其中,滤筒包括气体多孔膜,气体多孔膜包括限定过滤器内部的壁部分,滤筒在一端具有气流入口,空气夹带的污物通过气流入口进入过滤器,污物保留在内部并且空气通过气体多孔膜,