
一种基于凸性缺陷关键点的齿轮参数快速检测方法.pdf

新月****姐a


1/8

2/8

3/8

4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

一种基于凸性缺陷关键点的齿轮参数快速检测方法.pdf
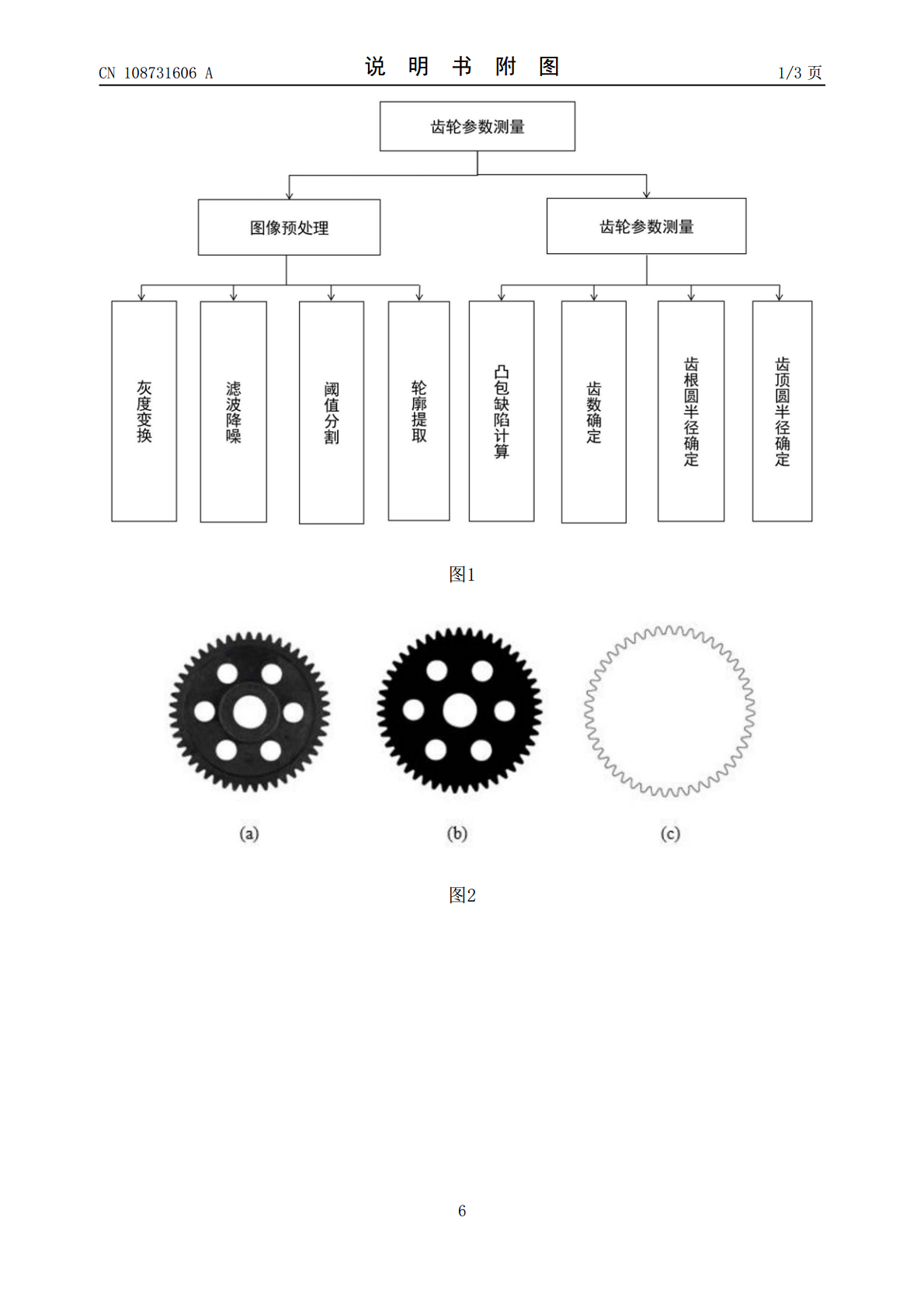
本发明涉及一种基于凸性缺陷关键点的齿轮参数快速检测方法,采用从齿轮图像轮廓的凸性缺陷中提取关键点的方法,提出了一种快速测量齿轮参数的方法。首先对预处理之后的齿轮图像提取齿轮外轮廓,求取外轮廓的凸包和凸性缺陷;然后利用凸性缺陷的性质,求得齿数以及齿根圆和齿顶圆上的关键点;最后利用关键点拟合圆求得齿根圆和齿顶圆半径。其中外轮廓提取的方法应用能够提升对于局部高光齿轮图片的检测鲁棒性,齿轮凸性缺陷使得检测无须以定位齿轮中心为前提,避免了齿轮中心定位误差对于齿轮参数测量精度的影响。而提取关键点进行计算,大大减小了计

一种齿轮外观缺陷快速影像检测方法.pdf
本发明涉及一种齿轮外观缺陷快速影像检测方法,其包括检测预处理阶段和在线检测两个阶段;检测预处理阶段包括目标区域自动设置、生成粗检模板和生成精检模板三个过程;在线检测阶段包括如下步骤:J1)图像采集;J2)预处理和特征提取;J3)待检图像与粗检模板图像进行面积差值运算以进行粗检判断;J4)将待检图像与精检模板图像进行配准,使得两图像的齿轮齿向重合;J5)将待检图像与精检模板图像进行异或运算得出差异图像,获得差异图像中的缺陷区域面积并进行精检判断。本发明利用机器视觉进行图像采集,利用图像面积差值运算进行粗检判

基于齿轮的齿形缺陷检测方法.pdf
本发明涉及齿轮缺陷检测技术领域,具体涉及一种基于齿轮的齿形缺陷检测方法,该方法包括:获取齿轮灰度图像,并获取图像上的圆形边缘和轮齿边缘,计算轮齿边缘上各像素点到圆形边缘中圆心点的距离得到像素点的指示距离,构成指示距离序列;获取轮齿点间隔点,根据轮齿点间隔中像素点的指示距离计算齿形缺陷程度;根据齿形缺陷程判断轮齿是否存在缺陷;若存在缺陷,则获取指示距离序列中各元素与其相邻元素的差值构成距离差值序列;根据距离差值序列中元素之和的取值,确定齿轮是否存在形状缺陷;若存在,则根据指示距离序列中元素计算齿形评价指标,

结构调谐共振的齿轮缺陷快速检测方法及检测装置.pdf
本发明公开了结构调谐共振的齿轮缺陷快速检测方法及检测装置,涉及一种齿轮的毛刺、划痕、磕碰伤和微裂纹的快速检测方法,属于检测技术与仪器、机械传动技术领域。在专用的齿轮缺陷调谐共振的快速检机上,齿轮在额定负载条件下,通过选择合理的转速使得齿轮的啮合频率及其谐波频率与齿轮缺陷调谐共振快速检测装置的固有频率或其某一阶谐振频率相近,进而在检测过程中使被检测齿轮与标准齿轮单面啮合时发生共振。通过分析处理安装在振动感应敏感位置处的加速度传感器获得的齿轮振动信号,准确、可靠的识别齿轮缺陷,实现齿轮缺陷快速检测。

一种基于模板匹配的齿轮缺陷检测方法及系统.pdf
本发明涉及数据处理技术领域,具体涉及一种基于模板匹配的齿轮缺陷检测方法及系统,该方法分别采集同批次中每个齿轮的齿轮图像以得到对应的灰度图像,将每张灰度图像分割成齿身图像和齿牙图像,基于齿身的圆形特性分析每张齿身图像中齿身的相似程度以得到齿身标准模板;根据齿牙轮廓的对称性差异值和齿牙的齿根直线长度的长度差异值分析齿牙的异常程度,由每张齿牙图像的异常程度得到齿牙标准模板;基于齿身标准模板和齿牙标准模板对每张齿轮图像中齿轮进行缺陷检测。对同批次的齿轮进行特征分析,自适应得到齿轮的齿身模板和齿牙模板,基于齿身模板