
一种筒体对接装置.pdf

是你****松呀

1/7

2/7
3/7

4/7
5/7
6/7
7/7
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种筒体对接装置.pdf
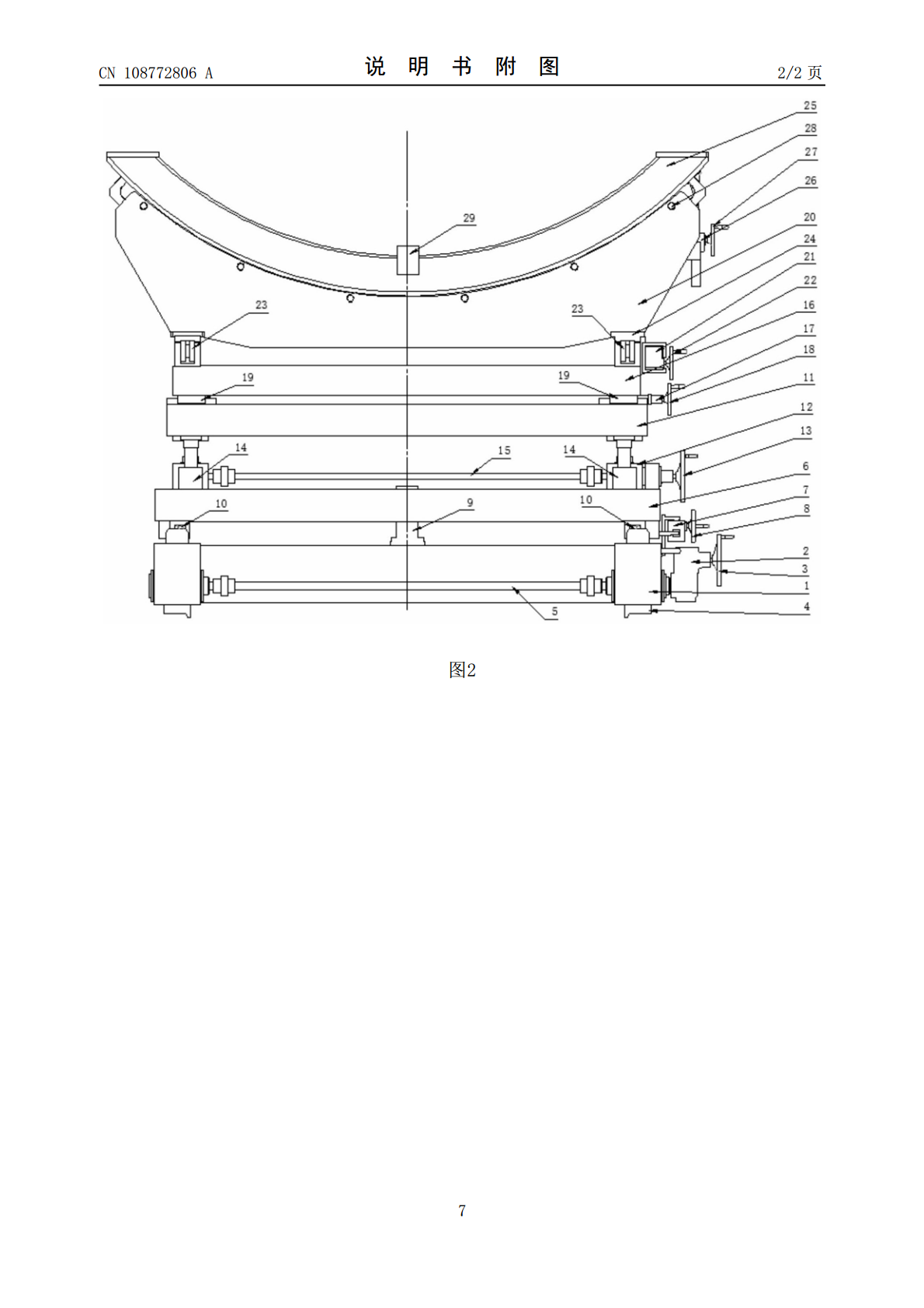
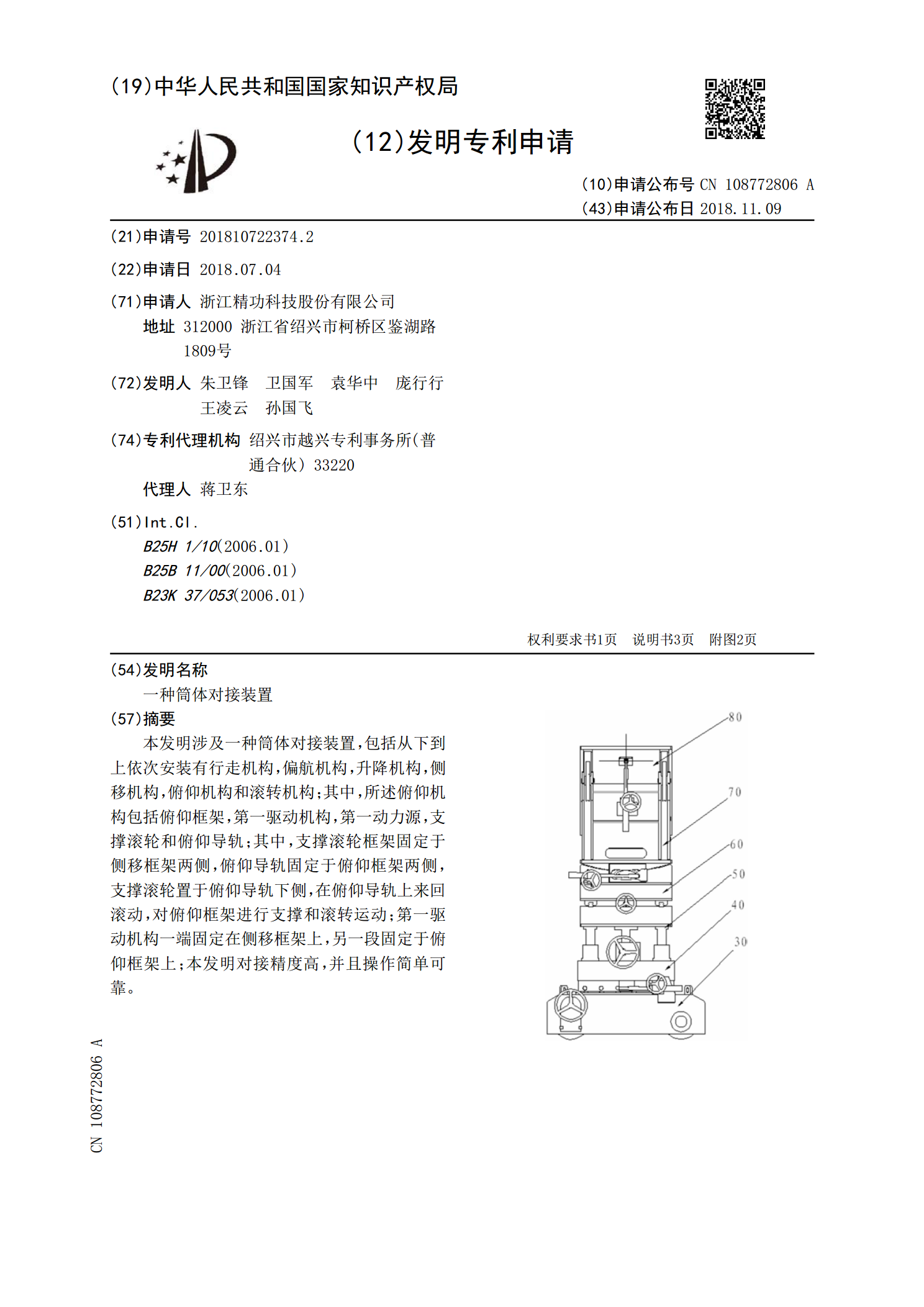
本发明涉及一种筒体对接装置,包括从下到上依次安装有行走机构,偏航机构,升降机构,侧移机构,俯仰机构和滚转机构;其中,所述俯仰机构包括俯仰框架,第一驱动机构,第一动力源,支撑滚轮和俯仰导轨;其中,支撑滚轮框架固定于侧移框架两侧,俯仰导轨固定于俯仰框架两侧,支撑滚轮置于俯仰导轨下侧,在俯仰导轨上来回滚动,对俯仰框架进行支撑和滚转运动;第一驱动机构一端固定在侧移框架上,另一段固定于俯仰框架上;本发明对接精度高,并且操作简单可靠。

一种钢制筒体组对接长法.pdf
本发明涉及一种筒体制作组对的方法,特别是涉及一种钢制筒体的组对方法。要解决的技术问题是,作业难度大、效率低、成本高、安全性差、组对完成后需打掉“弯尺弯”磨平焊点等缺点。本发明解决其技术问题所采用的技术方案是:利用主动滚轮架(5)和被动滚轮架(6)作为已组对好筒段(或首个筒节)(1)的支撑体及转动动力源,组对专用滚轮架(3、4)作为欲组对筒节的支撑体,通过调节组对专用滚轮架滚轮的位置来调节筒节接口之间的错口及母线直线度,当接口的间隙、错边量、平整度等调整到符合要求时进行接口的定位焊,之后完成
一种用于筒体对接的焊接工装.pdf
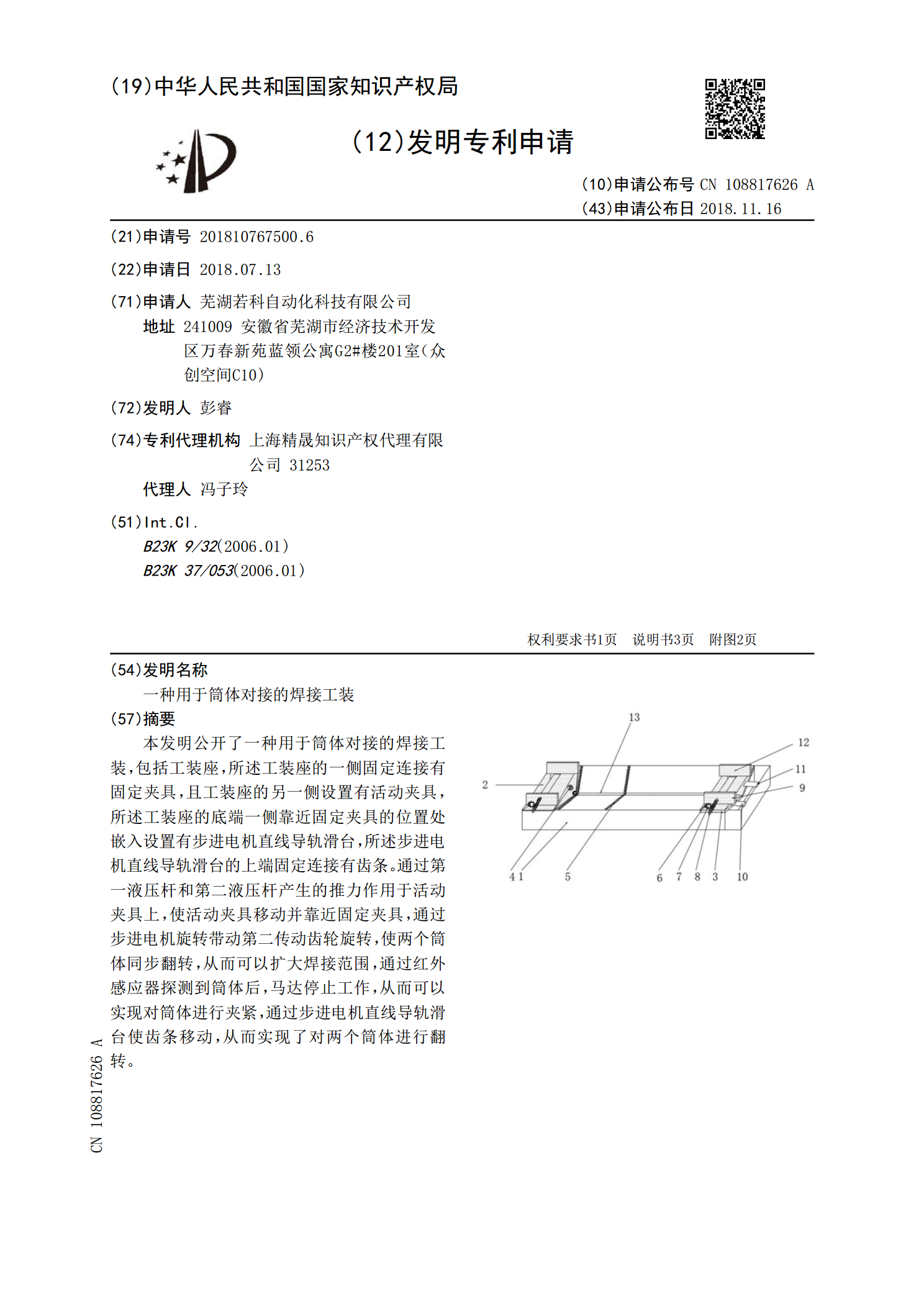
本发明公开了一种用于筒体对接的焊接工装,包括工装座,所述工装座的一侧固定连接有固定夹具,且工装座的另一侧设置有活动夹具,所述工装座的底端一侧靠近固定夹具的位置处嵌入设置有步进电机直线导轨滑台,所述步进电机直线导轨滑台的上端固定连接有齿条。通过第一液压杆和第二液压杆产生的推力作用于活动夹具上,使活动夹具移动并靠近固定夹具,通过步进电机旋转带动第二传动齿轮旋转,使两个筒体同步翻转,从而可以扩大焊接范围,通过红外感应器探测到筒体后,马达停止工作,从而可以实现对筒体进行夹紧,通过步进电机直线导轨滑台使齿条移动,从

一种对接筒体件对组焊接设备.pdf
本发明是一种对接筒体件对组焊接设备,其特征在于:该焊接设备包括筒体件固定台以及设置在固定台上的焊接装置连接架,所述的固定台包括一个操作台架,在操作台架中设置辅动辊,在操作台架的两侧各设置侧向导动结构,在操作台架中还设置主动轮体结构,所述的焊接装置连接架包括设置在操作台架侧边各设置的焊接伸缩杆,在2个伸缩杆顶端连接一个焊接设备连接杆,在焊接设备连接杆的中部设置焊接设备连接座,所述的主动轮体结构包括2个主动轮以及连接每个主动轮的驱动电机。本发明的有益效果:该焊接工装结构简单、使用方便,利用自走式焊接方式,实现
一种机械筒体环缝焊接用筒体支撑装置.pdf
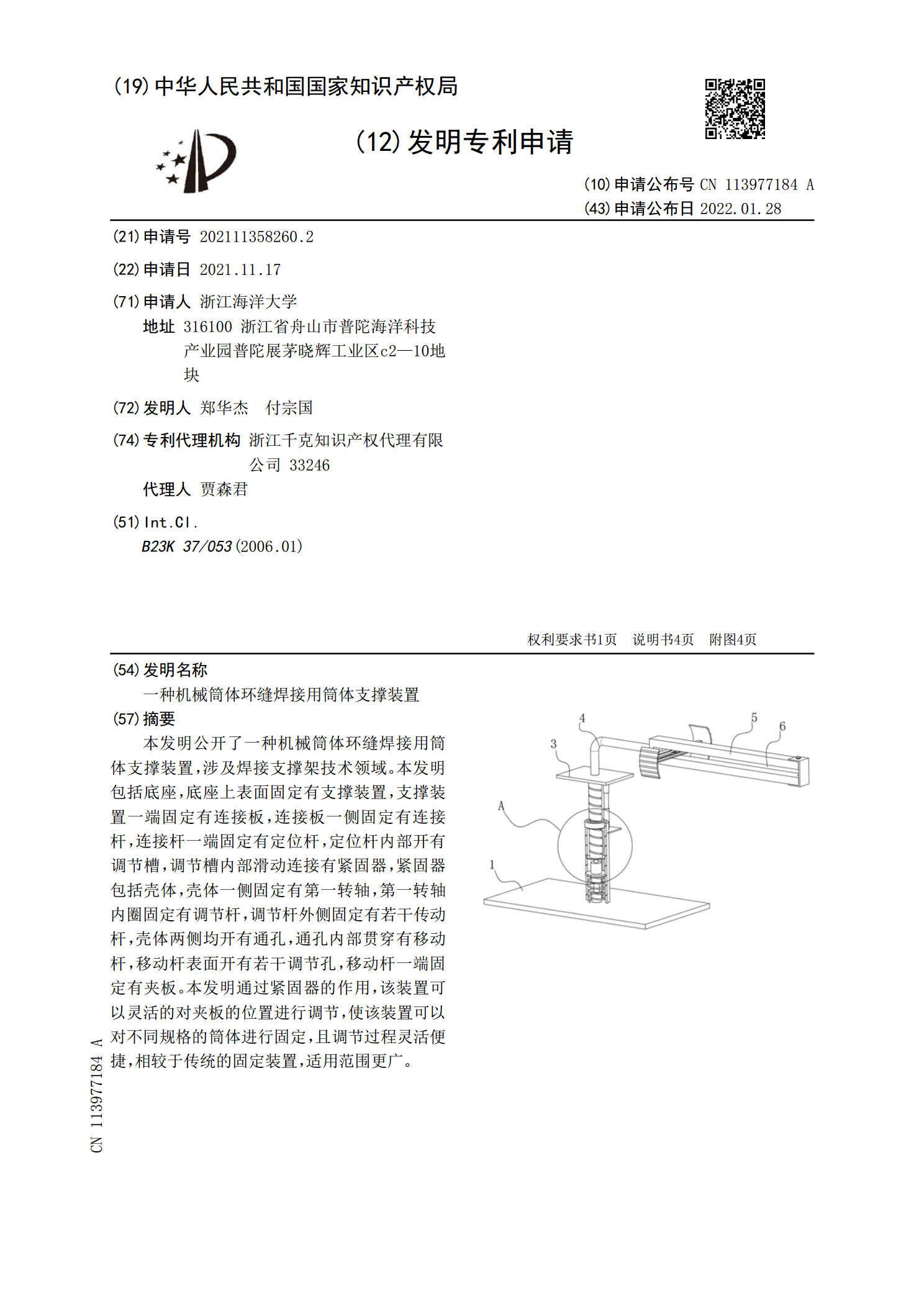
本发明公开了一种机械筒体环缝焊接用筒体支撑装置,涉及焊接支撑架技术领域。本发明包括底座,底座上表面固定有支撑装置,支撑装置一端固定有连接板,连接板一侧固定有连接杆,连接杆一端固定有定位杆,定位杆内部开有调节槽,调节槽内部滑动连接有紧固器,紧固器包括壳体,壳体一侧固定有第一转轴,第一转轴内圈固定有调节杆,调节杆外侧固定有若干传动杆,壳体两侧均开有通孔,通孔内部贯穿有移动杆,移动杆表面开有若干调节孔,移动杆一端固定有夹板。本发明通过紧固器的作用,该装置可以灵活的对夹板的位置进行调节,使该装置可以对不同规格的筒